#include <Proactor.h>
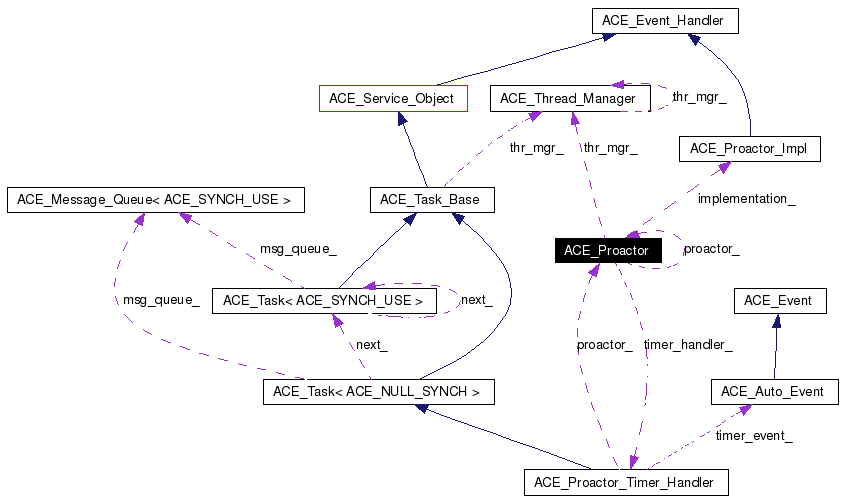
Collaboration diagram for ACE_Proactor:
Public Types | |
| typedef ACE_Timer_Queue_T< ACE_Handler *, ACE_Proactor_Handle_Timeout_Upcall, ACE_SYNCH_RECURSIVE_MUTEX > | TIMER_QUEUE |
| Public type. | |
| typedef int(* | PROACTOR_EVENT_HOOK )(ACE_Proactor *) |
Public Member Functions | |
| ACE_Proactor (ACE_Proactor_Impl *implementation=0, int delete_implementation=0, TIMER_QUEUE *tq=0) | |
| ~ACE_Proactor (void) | |
| Destruction. | |
| int | close (void) |
Close the associated ACE_Proactor_Impl implementation object. | |
| int | proactor_run_event_loop (PROACTOR_EVENT_HOOK=0) |
| int | proactor_run_event_loop (ACE_Time_Value &tv, PROACTOR_EVENT_HOOK=0) |
| int | proactor_end_event_loop (void) |
| int | proactor_event_loop_done (void) |
| Report if the ACE_Proactor event loop is finished. | |
| int | proactor_reset_event_loop (void) |
| int | register_handle (ACE_HANDLE handle, const void *completion_key) |
| long | schedule_timer (ACE_Handler &handler, const void *act, const ACE_Time_Value &time) |
| long | schedule_repeating_timer (ACE_Handler &handler, const void *act, const ACE_Time_Value &interval) |
| long | schedule_timer (ACE_Handler &handler, const void *act, const ACE_Time_Value &time, const ACE_Time_Value &interval) |
| int | cancel_timer (ACE_Handler &handler, int dont_call_handle_close=1) |
| int | cancel_timer (long timer_id, const void **act=0, int dont_call_handle_close=1) |
| int | handle_events (ACE_Time_Value &wait_time) |
| int | handle_events (void) |
| int | wake_up_dispatch_threads (void) |
| Add wakeup dispatch threads (reinit). | |
| int | close_dispatch_threads (int wait) |
| Close all dispatch threads. | |
| size_t | number_of_threads (void) const |
| Get number of thread used as a parameter to CreatIoCompletionPort. | |
| void | number_of_threads (size_t threads) |
| Set number of thread used as a parameter to CreatIoCompletionPort. | |
| TIMER_QUEUE * | timer_queue (void) const |
| Get timer queue. | |
| void | timer_queue (TIMER_QUEUE *timer_queue) |
| Set timer queue. | |
| ACE_HANDLE | get_handle (void) const |
| ACE_Proactor_Impl * | implementation (void) const |
| Get the implementation class. | |
| ACE_Asynch_Read_Stream_Impl * | create_asynch_read_stream (void) |
| ACE_Asynch_Write_Stream_Impl * | create_asynch_write_stream (void) |
| ACE_Asynch_Read_File_Impl * | create_asynch_read_file (void) |
| ACE_Asynch_Write_File_Impl * | create_asynch_write_file (void) |
| ACE_Asynch_Accept_Impl * | create_asynch_accept (void) |
| Create the correct implementation class for doing Asynch_Accept. | |
| ACE_Asynch_Connect_Impl * | create_asynch_connect (void) |
| Create the correct implementation class for doing Asynch_Connect. | |
| ACE_Asynch_Transmit_File_Impl * | create_asynch_transmit_file (void) |
| ACE_Asynch_Read_Dgram_Impl * | create_asynch_read_dgram (void) |
| ACE_Asynch_Write_Dgram_Impl * | create_asynch_write_dgram (void) |
| ACE_Asynch_Read_Stream_Result_Impl * | create_asynch_read_stream_result (ACE_Handler::Proxy_Ptr &handler_proxy, ACE_HANDLE handle, ACE_Message_Block &message_block, u_long bytes_to_read, const void *act, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
| ACE_Asynch_Write_Stream_Result_Impl * | create_asynch_write_stream_result (ACE_Handler::Proxy_Ptr &handler_proxy, ACE_HANDLE handle, ACE_Message_Block &message_block, u_long bytes_to_write, const void *act, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
| ACE_Asynch_Read_File_Result_Impl * | create_asynch_read_file_result (ACE_Handler::Proxy_Ptr &handler_proxy, ACE_HANDLE handle, ACE_Message_Block &message_block, u_long bytes_to_read, const void *act, u_long offset, u_long offset_high, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
| ACE_Asynch_Write_File_Result_Impl * | create_asynch_write_file_result (ACE_Handler::Proxy_Ptr &handler_proxy, ACE_HANDLE handle, ACE_Message_Block &message_block, u_long bytes_to_write, const void *act, u_long offset, u_long offset_high, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
| ACE_Asynch_Read_Dgram_Result_Impl * | create_asynch_read_dgram_result (ACE_Handler::Proxy_Ptr &handler_proxy, ACE_HANDLE handle, ACE_Message_Block *message_block, size_t bytes_to_read, int flags, int protocol_family, const void *act, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
| ACE_Asynch_Write_Dgram_Result_Impl * | create_asynch_write_dgram_result (ACE_Handler::Proxy_Ptr &handler_proxy, ACE_HANDLE handle, ACE_Message_Block *message_block, size_t bytes_to_write, int flags, const void *act, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
| ACE_Asynch_Accept_Result_Impl * | create_asynch_accept_result (ACE_Handler::Proxy_Ptr &handler_proxy, ACE_HANDLE listen_handle, ACE_HANDLE accept_handle, ACE_Message_Block &message_block, u_long bytes_to_read, const void *act, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
| Create the correct implementation class for ACE_Asynch_Accept::Result. | |
| ACE_Asynch_Connect_Result_Impl * | create_asynch_connect_result (ACE_Handler::Proxy_Ptr &handler_proxy, ACE_HANDLE connect_handle, const void *act, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
| Create the correct implementation class for ACE_Asynch_Connect::Result. | |
| ACE_Asynch_Transmit_File_Result_Impl * | create_asynch_transmit_file_result (ACE_Handler::Proxy_Ptr &handler_proxy, ACE_HANDLE socket, ACE_HANDLE file, ACE_Asynch_Transmit_File::Header_And_Trailer *header_and_trailer, u_long bytes_to_write, u_long offset, u_long offset_high, u_long bytes_per_send, u_long flags, const void *act, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
| ACE_Asynch_Result_Impl * | create_asynch_timer (ACE_Handler::Proxy_Ptr &handler_proxy, const void *act, const ACE_Time_Value &tv, ACE_HANDLE event=ACE_INVALID_HANDLE, int priority=0, int signal_number=ACE_SIGRTMIN) |
Static Public Member Functions | |
| ACE_Proactor * | instance (size_t threads=0) |
| ACE_Proactor * | instance (ACE_Proactor *proactor, int delete_proactor=0) |
| void | close_singleton (void) |
| Delete the dynamically allocated Singleton. | |
| void | cleanup (void *instance, void *arg) |
| const ACE_TCHAR * | dll_name (void) |
| Name of dll in which the singleton instance lives. | |
| const ACE_TCHAR * | name (void) |
| Name of component--ACE_Proactor in this case. | |
| int | run_event_loop (void) |
| int | run_event_loop (ACE_Time_Value &tv) |
| int | end_event_loop (void) |
| int | reset_event_loop (void) |
| int | check_reconfiguration (ACE_Proactor *) |
| int | event_loop_done (void) |
| Report if the <ACE_Proactor::instance> event loop is finished. | |
Protected Member Functions | |
| int | proactor_post_wakeup_completions (int how_many) |
| void | implementation (ACE_Proactor_Impl *implementation) |
| Set the implementation class. | |
Static Protected Member Functions | |
| int | post_wakeup_completions (int how_many) |
Protected Attributes | |
| ACE_Proactor_Impl * | implementation_ |
| int | delete_implementation_ |
| ACE_Proactor_Timer_Handler * | timer_handler_ |
| Handles timeout events. | |
| ACE_Thread_Manager | thr_mgr_ |
| This will manage the thread in the Timer_Handler. | |
| TIMER_QUEUE * | timer_queue_ |
| Timer Queue. | |
| int | delete_timer_queue_ |
| Flag on whether to delete the timer queue. | |
| sig_atomic_t | end_event_loop_ |
| Terminate the proactor event loop. | |
| sig_atomic_t | event_loop_thread_count_ |
| Number of threads in the event loop. | |
| ACE_SYNCH_MUTEX | mutex_ |
| Mutex to protect work with lists. | |
Static Protected Attributes | |
| ACE_Proactor * | proactor_ = 0 |
| Pointer to a process-wide . | |
| int | delete_proactor_ = 0 |
| Must delete the if non-0. | |
Private Types | |
| typedef ACE_Timer_Queue_Iterator_T< ACE_Handler *, ACE_Proactor_Handle_Timeout_Upcall, ACE_SYNCH_RECURSIVE_MUTEX > | TIMER_QUEUE_ITERATOR |
| typedef ACE_Timer_List_T< ACE_Handler *, ACE_Proactor_Handle_Timeout_Upcall, ACE_SYNCH_RECURSIVE_MUTEX > | TIMER_LIST |
| typedef ACE_Timer_List_Iterator_T< ACE_Handler *, ACE_Proactor_Handle_Timeout_Upcall, ACE_SYNCH_RECURSIVE_MUTEX > | TIMER_LIST_ITERATOR |
| typedef ACE_Timer_Heap_T< ACE_Handler *, ACE_Proactor_Handle_Timeout_Upcall, ACE_SYNCH_RECURSIVE_MUTEX > | TIMER_HEAP |
| typedef ACE_Timer_Heap_Iterator_T< ACE_Handler *, ACE_Proactor_Handle_Timeout_Upcall, ACE_SYNCH_RECURSIVE_MUTEX > | TIMER_HEAP_ITERATOR |
| typedef ACE_Timer_Wheel_T< ACE_Handler *, ACE_Proactor_Handle_Timeout_Upcall, ACE_SYNCH_RECURSIVE_MUTEX > | TIMER_WHEEL |
| typedef ACE_Timer_Wheel_Iterator_T< ACE_Handler *, ACE_Proactor_Handle_Timeout_Upcall, ACE_SYNCH_RECURSIVE_MUTEX > | TIMER_WHEEL_ITERATOR |
Private Member Functions | |
| ACE_Proactor (const ACE_Proactor &) | |
| Deny access since member-wise won't work... | |
| ACE_Proactor & | operator= (const ACE_Proactor &) |
Friends | |
| class | ACE_Proactor_Timer_Handler |
See the Proactor pattern description at http://www.cs.wustl.edu/~schmidt/proactor.ps.gz for more details.
Definition at line 134 of file Proactor.h.
|
|
You can add a hook to various run_event methods and the hook will be called after handling every proactor event. If this function returns 0, proactor_run_event_loop will check for the return value of handle_events. If it is -1, the the proactor_run_event_loop will return (pre-maturely.) Definition at line 266 of file Proactor.h. Referenced by proactor_run_event_loop(). |
|
|
Definition at line 153 of file Proactor.h. Referenced by timer_queue(). |
|
|
Definition at line 157 of file Proactor.h. |
|
|
Definition at line 145 of file Proactor.h. |
|
|
Definition at line 149 of file Proactor.h. |
|
|
Public type.
Definition at line 178 of file Proactor.h. |
|
|
Definition at line 141 of file Proactor.h. |
|
|
Definition at line 161 of file Proactor.h. |
|
|
Definition at line 165 of file Proactor.h. |
|
||||||||||||||||
|
Constructor. If is 0, the correct implementation object will be created. flag determines whether the implementation object should be deleted by the Proactor or not. If is 0, a new TIMER_QUEUE is created. Definition at line 300 of file Proactor.cpp. References ACE_ERROR, ACE_LIB_TEXT, ACE_NEW, ACE_Task_Base::activate(), implementation(), LM_ERROR, timer_handler_, and timer_queue().
00303 : implementation_ (0), 00304 delete_implementation_ (delete_implementation), 00305 timer_handler_ (0), 00306 timer_queue_ (0), 00307 delete_timer_queue_ (0), 00308 end_event_loop_ (0), 00309 event_loop_thread_count_ (0) 00310 { 00311 this->implementation (implementation); 00312 00313 if (this->implementation () == 0) 00314 { 00315 #if defined (ACE_HAS_AIO_CALLS) 00316 // POSIX Proactor. 00317 # if defined (ACE_POSIX_AIOCB_PROACTOR) 00318 ACE_NEW (implementation, ACE_POSIX_AIOCB_Proactor); 00319 # elif defined (ACE_POSIX_SIG_PROACTOR) 00320 ACE_NEW (implementation, ACE_POSIX_SIG_Proactor); 00321 # else /* Default order: CB (but not Lynx), SIG, AIOCB */ 00322 # if !defined (__Lynx) && !defined (__FreeBSD__) 00323 ACE_NEW (implementation, ACE_POSIX_CB_Proactor); 00324 # else 00325 # if defined(ACE_HAS_POSIX_REALTIME_SIGNALS) 00326 ACE_NEW (implementation, ACE_POSIX_SIG_Proactor); 00327 # else 00328 ACE_NEW (implementation, ACE_POSIX_AIOCB_Proactor); 00329 # endif /* ACE_HAS_POSIX_REALTIME_SIGNALS */ 00330 # endif /* !__Lynx && !__FreeBSD__ */ 00331 # endif /* ACE_POSIX_AIOCB_PROACTOR */ 00332 #elif (defined (ACE_WIN32) && !defined (ACE_HAS_WINCE)) 00333 // WIN_Proactor. 00334 ACE_NEW (implementation, 00335 ACE_WIN32_Proactor); 00336 #endif /* ACE_HAS_AIO_CALLS */ 00337 this->implementation (implementation); 00338 this->delete_implementation_ = 1; 00339 } 00340 00341 // Set the timer queue. 00342 this->timer_queue (tq); 00343 00344 // Create the timer handler 00345 ACE_NEW (this->timer_handler_, 00346 ACE_Proactor_Timer_Handler (*this)); 00347 00348 // Activate <timer_handler>. 00349 if (this->timer_handler_->activate (THR_NEW_LWP) == -1) 00350 ACE_ERROR ((LM_ERROR, 00351 ACE_LIB_TEXT ("%N:%l:(%P | %t):%p\n"), 00352 ACE_LIB_TEXT ("Task::activate:could not create thread\n"))); 00353 } |
|
|
Destruction.
Definition at line 355 of file Proactor.cpp. References close().
00356 {
00357 this->close ();
00358 }
|
|
|
Deny access since member-wise won't work...
|
|
||||||||||||||||
|
Cancel the single that matches the value (which was returned from the method). If is non-NULL then it will be set to point to the ``magic cookie'' argument passed in when the was registered. This makes it possible to free up the memory and avoid memory leaks. Returns 1 if cancellation succeeded and 0 if the wasn't found. Definition at line 704 of file Proactor.cpp.
00707 {
00708 // No need to singal timer event here. Even if the cancel timer was
00709 // the earliest, we will have an extra wakeup.
00710 return this->timer_queue_->cancel (timer_id,
00711 arg,
00712 dont_call_handle_close);
00713 }
|
|
||||||||||||
|
Cancel all timers associated with this . Returns number of timers cancelled. Definition at line 716 of file Proactor.cpp.
00718 {
00719 // No need to signal timer event here. Even if the cancel timer was
00720 // the earliest, we will have an extra wakeup.
00721 return this->timer_queue_->cancel (&handler,
00722 dont_call_handle_close);
00723 }
|
|
|
The singleton proactor is used by the ACE_Service_Config. Therefore, we must check for the reconfiguration request and handle it after handling an event. Definition at line 432 of file Proactor.cpp. References ACE_Service_Config::reconfig_occurred(), and ACE_Service_Config::reconfigure(). Referenced by run_event_loop().
00433 {
00434 #if !defined (ACE_HAS_WINCE) && !defined (ACE_LACKS_ACE_SVCCONF)
00435 if (ACE_Service_Config::reconfig_occurred ())
00436 {
00437 ACE_Service_Config::reconfigure ();
00438 return 1;
00439 }
00440 #endif /* ! ACE_HAS_WINCE || ! ACE_LACKS_ACE_SVCCONF */
00441 return 0;
00442 }
|
|
||||||||||||
|
Cleanup method, used by the to destroy the singleton. |
|
|
Close the associated If
Definition at line 602 of file Proactor.cpp. References ACE_ERROR_RETURN, ACE_LIB_TEXT, ACE_Proactor_Impl::close(), implementation(), LM_ERROR, and timer_handler_. Referenced by ~ACE_Proactor().
00603 {
00604 // Close the implementation.
00605 if (this->implementation ()->close () == -1)
00606 ACE_ERROR_RETURN ((LM_ERROR,
00607 ACE_LIB_TEXT ("%N:%l:(%P | %t):%p\n"),
00608 ACE_LIB_TEXT ("ACE_Proactor::close:implementation couldnt be closed")),
00609 -1);
00610
00611 // Delete the implementation.
00612 if (this->delete_implementation_)
00613 {
00614 delete this->implementation ();
00615 this->implementation_ = 0;
00616 }
00617
00618 // Delete the timer handler.
00619 if (this->timer_handler_)
00620 {
00621 delete this->timer_handler_;
00622 this->timer_handler_ = 0;
00623 }
00624
00625 // Delete the timer queue.
00626 if (this->delete_timer_queue_)
00627 {
00628 delete this->timer_queue_;
00629 this->timer_queue_ = 0;
00630 this->delete_timer_queue_ = 0;
00631 }
00632
00633 return 0;
00634 }
|
|
|
Close all dispatch threads.
Definition at line 744 of file Proactor.cpp.
00745 {
00746 return 0;
00747 }
|
|
|
Delete the dynamically allocated Singleton.
Definition at line 403 of file Proactor.cpp. References ACE_GUARD, ACE_TRACE, delete_proactor_, and proactor_.
00404 {
00405 ACE_TRACE ("ACE_Proactor::close_singleton");
00406
00407 ACE_MT (ACE_GUARD (ACE_Recursive_Thread_Mutex, ace_mon,
00408 *ACE_Static_Object_Lock::instance ()));
00409
00410 if (ACE_Proactor::delete_proactor_)
00411 {
00412
00413 delete ACE_Proactor::proactor_;
00414 ACE_Proactor::proactor_ = 0;
00415 ACE_Proactor::delete_proactor_ = 0;
00416 }
00417 }
|
|
|
Create the correct implementation class for doing Asynch_Accept.
Definition at line 844 of file Proactor.cpp. References ACE_Proactor_Impl::create_asynch_accept(), and implementation(). Referenced by ACE_Asynch_Accept::open().
00845 {
00846 return this->implementation ()->create_asynch_accept ();
00847 }
|
|
||||||||||||||||||||||||||||||||||||||||
|
Create the correct implementation class for ACE_Asynch_Accept::Result.
Definition at line 1010 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr.
01019 {
01020 return this->implementation ()->create_asynch_accept_result
01021 (handler_proxy,
01022 listen_handle,
01023 accept_handle,
01024 message_block,
01025 bytes_to_read,
01026 act,
01027 event,
01028 priority,
01029 signal_number);
01030 }
|
|
|
Create the correct implementation class for doing Asynch_Connect.
Definition at line 850 of file Proactor.cpp. References ACE_Proactor_Impl::create_asynch_connect(), and implementation(). Referenced by ACE_Asynch_Connect::open().
00851 {
00852 return this->implementation ()->create_asynch_connect ();
00853 }
|
|
||||||||||||||||||||||||||||
|
Create the correct implementation class for ACE_Asynch_Connect::Result.
Definition at line 1034 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr.
01040 {
01041 return this->implementation ()->create_asynch_connect_result
01042 (handler_proxy,
01043 connect_handle,
01044 act,
01045 event,
01046 priority,
01047 signal_number);
01048 }
|
|
|
Create the correct implementation class for doing Asynch_Read_Dgram. Definition at line 820 of file Proactor.cpp. References ACE_Proactor_Impl::create_asynch_read_dgram(), and implementation(). Referenced by ACE_Asynch_Read_Dgram::open().
00821 {
00822 return this->implementation ()->create_asynch_read_dgram ();
00823 }
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
Create the correct implementation class for ACE_Asynch_Read_Dgram::Result. Definition at line 960 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr.
00970 {
00971 return this->implementation()->create_asynch_read_dgram_result
00972 (handler_proxy,
00973 handle,
00974 message_block,
00975 bytes_to_read,
00976 flags,
00977 protocol_family,
00978 act,
00979 event,
00980 priority,
00981 signal_number);
00982 }
|
|
|
Create the correct implementation class for doing Asynch_Read_File. Definition at line 832 of file Proactor.cpp. References ACE_Proactor_Impl::create_asynch_read_file(), and implementation(). Referenced by ACE_Asynch_Read_File::open().
00833 {
00834 return this->implementation ()->create_asynch_read_file ();
00835 }
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
Create the correct implementation class for ACE_Asynch_Read_File::Result. Definition at line 908 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr.
00918 {
00919 return this->implementation ()->create_asynch_read_file_result
00920 (handler_proxy,
00921 handle,
00922 message_block,
00923 bytes_to_read,
00924 act,
00925 offset,
00926 offset_high,
00927 event,
00928 priority,
00929 signal_number);
00930 }
|
|
|
Create the correct implementation class for doing Asynch_Read_Stream. Definition at line 808 of file Proactor.cpp. References ACE_Proactor_Impl::create_asynch_read_stream(), and implementation(). Referenced by ACE_Asynch_Read_Stream::open().
00809 {
00810 return this->implementation ()->create_asynch_read_stream ();
00811 }
|
|
||||||||||||||||||||||||||||||||||||
|
Create the correct implementation class for ACE_Asynch_Read_Stream::Result class. Definition at line 863 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr.
00871 {
00872 return this->implementation ()->create_asynch_read_stream_result
00873 (handler_proxy,
00874 handle,
00875 message_block,
00876 bytes_to_read,
00877 act,
00878 event,
00879 priority,
00880 signal_number);
00881 }
|
|
||||||||||||||||||||||||||||
|
Create a timer result object which can be used with the Timer mechanism of the Proactor. If is -1, will create a Timer object with a meaningful signal number, choosing the largest signal number from the signal mask of the Proactor. Definition at line 1084 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr. Referenced by ACE_Proactor_Handle_Timeout_Upcall::timeout().
01090 {
01091 return this->implementation ()->create_asynch_timer
01092 (handler_proxy,
01093 act,
01094 tv,
01095 event,
01096 priority,
01097 signal_number);
01098 }
|
|
|
Create the correct implementation class for doing Asynch_Transmit_File. Definition at line 856 of file Proactor.cpp. References ACE_Proactor_Impl::create_asynch_transmit_file(), and implementation(). Referenced by ACE_Asynch_Transmit_File::open().
00857 {
00858 return this->implementation ()->create_asynch_transmit_file ();
00859 }
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Create the correct implementation class for ACE_Asynch_Transmit_File::Result. Definition at line 1052 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr.
01065 {
01066 return this->implementation ()->create_asynch_transmit_file_result
01067 (handler_proxy,
01068 socket,
01069 file,
01070 header_and_trailer,
01071 bytes_to_write,
01072 offset,
01073 offset_high,
01074 bytes_per_send,
01075 flags,
01076 act,
01077 event,
01078 priority,
01079 signal_number);
01080 }
|
|
|
Create the correct implementation class for doing Asynch_Write_Dgram. Definition at line 826 of file Proactor.cpp. References ACE_Proactor_Impl::create_asynch_write_dgram(), and implementation(). Referenced by ACE_Asynch_Write_Dgram::open().
00827 {
00828 return this->implementation ()->create_asynch_write_dgram ();
00829 }
|
|
||||||||||||||||||||||||||||||||||||||||
|
Create the correct implementation class for ACE_Asynch_Write_Dgram::Result. Definition at line 986 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr.
00995 {
00996 return this->implementation()->create_asynch_write_dgram_result
00997 (handler_proxy,
00998 handle,
00999 message_block,
01000 bytes_to_write,
01001 flags,
01002 act,
01003 event,
01004 priority,
01005 signal_number);
01006 }
|
|
|
Create the correct implementation class for doing Asynch_Write_File. Definition at line 838 of file Proactor.cpp. References ACE_Proactor_Impl::create_asynch_write_file(), and implementation(). Referenced by ACE_Asynch_Write_File::open().
00839 {
00840 return this->implementation ()->create_asynch_write_file ();
00841 }
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
Create the correct implementation class for ACE_Asynch_Write_File::Result. Definition at line 934 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr.
00944 {
00945 return this->implementation ()->create_asynch_write_file_result
00946 (handler_proxy,
00947 handle,
00948 message_block,
00949 bytes_to_write,
00950 act,
00951 offset,
00952 offset_high,
00953 event,
00954 priority,
00955 signal_number);
00956 }
|
|
|
Create the correct implementation class for doing Asynch_Write_Stream. Definition at line 814 of file Proactor.cpp. References ACE_Proactor_Impl::create_asynch_write_stream(), and implementation(). Referenced by ACE_Asynch_Write_Stream::open().
00815 {
00816 return this->implementation ()->create_asynch_write_stream ();
00817 }
|
|
||||||||||||||||||||||||||||||||||||
|
Create the correct implementation class for ACE_Asynch_Write_Stream::Result. Definition at line 886 of file Proactor.cpp. References ACE_Handler::Proxy_Ptr.
00894 {
00895 return this->implementation ()->create_asynch_write_stream_result
00896 (handler_proxy,
00897 handle,
00898 message_block,
00899 bytes_to_write,
00900 act,
00901 event,
00902 priority,
00903 signal_number);
00904 }
|
|
|
Name of dll in which the singleton instance lives.
Definition at line 420 of file Proactor.cpp. References ACE_LIB_TEXT.
00421 {
00422 return ACE_LIB_TEXT ("ACE");
00423 }
|
|
|
Instruct the <ACE_Proactor::instance> to terminate its event loop. This method wakes up all the threads blocked on waiting for completions and end the event loop. Definition at line 45 of file Proactor.inl. References ACE_TRACE, instance(), and proactor_end_event_loop().
00046 {
00047 ACE_TRACE ("ACE_Proactor::end_event_loop");
00048 ACE_Proactor * const p = ACE_Proactor::instance ();
00049
00050 if (p == 0)
00051 return -1;
00052
00053 return p->proactor_end_event_loop ();
00054 }
|
|
|
Report if the <ACE_Proactor::instance> event loop is finished.
Definition at line 57 of file Proactor.inl. References ACE_TRACE, instance(), and proactor_event_loop_done().
00058 {
00059 ACE_TRACE ("ACE_Proactor::event_loop_done");
00060 ACE_Proactor * const p = ACE_Proactor::instance ();
00061
00062 if (p == 0)
00063 return -1;
00064
00065 return p->proactor_event_loop_done ();
00066 }
|
|
|
Get the event handle. It is a no-op in POSIX platforms and it returns ACE_INVALID_HANDLE. Definition at line 795 of file Proactor.cpp. References ACE_Proactor_Impl::get_handle(), and implementation().
00796 {
00797 return this->implementation ()->get_handle ();
00798 }
|
|
|
Block indefinitely until at least one event is dispatched.
Definition at line 732 of file Proactor.cpp. References ACE_Proactor_Impl::handle_events(), and implementation(). Referenced by proactor_run_event_loop().
00733 {
00734 return this->implementation ()->handle_events ();
00735 }
|
|
|
Dispatch a single set of events, waiting up to a specified time limit if necessary.
Definition at line 726 of file Proactor.cpp. References ACE_Proactor_Impl::handle_events(), and implementation().
00727 {
00728 return implementation ()->handle_events (wait_time);
00729 }
|
|
|
Set the implementation class.
Definition at line 1107 of file Proactor.cpp.
01108 {
01109 this->implementation_ = implementation;
01110 }
|
|
|
Get the implementation class.
Definition at line 801 of file Proactor.cpp. Referenced by ACE_Proactor(), close(), create_asynch_accept(), create_asynch_connect(), create_asynch_read_dgram(), create_asynch_read_file(), create_asynch_read_stream(), create_asynch_transmit_file(), create_asynch_write_dgram(), create_asynch_write_file(), create_asynch_write_stream(), get_handle(), handle_events(), number_of_threads(), proactor_post_wakeup_completions(), register_handle(), and ACE_Proactor_Handle_Timeout_Upcall::timeout().
00802 {
00803 return this->implementation_;
00804 }
|
|
||||||||||||
|
Set pointer to a process-wide and return existing pointer. Definition at line 386 of file Proactor.cpp. References ACE_GUARD_RETURN, ACE_REGISTER_FRAMEWORK_COMPONENT, ACE_TRACE, delete_proactor_, and proactor_.
00387 {
00388 ACE_TRACE ("ACE_Proactor::instance");
00389
00390 ACE_MT (ACE_GUARD_RETURN (ACE_Recursive_Thread_Mutex, ace_mon,
00391 *ACE_Static_Object_Lock::instance (), 0));
00392
00393 ACE_Proactor *t = ACE_Proactor::proactor_;
00394
00395 ACE_Proactor::delete_proactor_ = delete_proactor;
00396 ACE_Proactor::proactor_ = r;
00397 ACE_REGISTER_FRAMEWORK_COMPONENT(ACE_Proactor, ACE_Proactor::proactor_);
00398
00399 return t;
00400 }
|
|
|
Get pointer to a process-wide . should be part of another method. Definition at line 361 of file Proactor.cpp. References ACE_GUARD_RETURN, ACE_NEW_RETURN, ACE_REGISTER_FRAMEWORK_COMPONENT, ACE_TRACE, delete_proactor_, and proactor_. Referenced by end_event_loop(), event_loop_done(), ACE_Asynch_Operation::get_proactor(), ACE_POSIX_Asynch_Operation::open(), post_wakeup_completions(), reset_event_loop(), and run_event_loop().
00362 {
00363 ACE_TRACE ("ACE_Proactor::instance");
00364
00365 if (ACE_Proactor::proactor_ == 0)
00366 {
00367 // Perform Double-Checked Locking Optimization.
00368 ACE_MT (ACE_GUARD_RETURN (ACE_Recursive_Thread_Mutex, ace_mon,
00369 *ACE_Static_Object_Lock::instance (),
00370 0));
00371
00372 if (ACE_Proactor::proactor_ == 0)
00373 {
00374 ACE_NEW_RETURN (ACE_Proactor::proactor_,
00375 ACE_Proactor,
00376 0);
00377
00378 ACE_Proactor::delete_proactor_ = 1;
00379 ACE_REGISTER_FRAMEWORK_COMPONENT(ACE_Proactor, ACE_Proactor::proactor_);
00380 }
00381 }
00382 return ACE_Proactor::proactor_;
00383 }
|
|
|
Name of component--ACE_Proactor in this case.
Definition at line 426 of file Proactor.cpp. References ACE_LIB_TEXT.
00427 {
00428 return ACE_LIB_TEXT ("ACE_Proactor");
00429 }
|
|
|
Set number of thread used as a parameter to CreatIoCompletionPort.
Definition at line 756 of file Proactor.cpp. References implementation(), and ACE_Proactor_Impl::number_of_threads().
00757 {
00758 this->implementation ()->number_of_threads (threads);
00759 }
|
|
|
Get number of thread used as a parameter to CreatIoCompletionPort.
Definition at line 750 of file Proactor.cpp. References implementation(), and ACE_Proactor_Impl::number_of_threads().
00751 {
00752 return this->implementation ()->number_of_threads ();
00753 }
|
|
|
|
|
|
Post completions to the completion port so that all threads can wake up. This is used in conjunction with the . Definition at line 69 of file Proactor.inl. References ACE_TRACE, instance(), and proactor_post_wakeup_completions().
00070 {
00071 ACE_TRACE ("ACE_Proactor::post_wakeup_completions");
00072 ACE_Proactor * const p = ACE_Proactor::instance ();
00073
00074 if (p == 0)
00075 return -1;
00076
00077 return p->proactor_post_wakeup_completions (how_many);
00078 }
|
|
|
Instruct the ACE_Proactor to terminate its event loop and notifies the ACE_Proactor so that it can wake up and close down gracefully. Definition at line 566 of file Proactor.cpp. References ACE_GUARD_RETURN, ACE_TRACE, end_event_loop_, event_loop_thread_count_, and proactor_post_wakeup_completions(). Referenced by end_event_loop().
00567 {
00568 ACE_TRACE ("ACE_Proactor::proactor_end_event_loop");
00569
00570 int how_many = 0;
00571
00572 {
00573 // Obtain the lock, set the end flag and post the wakeup
00574 // completions.
00575 ACE_MT (ACE_GUARD_RETURN (ACE_Thread_Mutex, ace_mon, mutex_, -1));
00576
00577 // Set the end flag.
00578 this->end_event_loop_ = 1;
00579
00580 // Number of completions to post.
00581 how_many = this->event_loop_thread_count_;
00582 if (how_many == 0)
00583 return 0;
00584 }
00585
00586 // Post completions to all the threads so that they will all wake
00587 // up.
00588 return this->proactor_post_wakeup_completions (how_many);
00589 }
|
|
|
Report if the ACE_Proactor event loop is finished.
Definition at line 592 of file Proactor.cpp. References ACE_GUARD_RETURN, ACE_TRACE, and end_event_loop_. Referenced by event_loop_done().
00593 {
00594 ACE_TRACE ("ACE_Proactor::proactor_event_loop_done");
00595
00596 ACE_MT (ACE_GUARD_RETURN (ACE_Thread_Mutex, ace_mon, mutex_, -1));
00597
00598 return this->end_event_loop_ != 0 ? 1 : 0 ;
00599 }
|
|
|
Post completions to the completion port so that all threads can wake up. This is used in conjunction with the . Definition at line 1101 of file Proactor.cpp. References implementation(), and ACE_Proactor_Impl::post_wakeup_completions(). Referenced by post_wakeup_completions(), proactor_end_event_loop(), and proactor_run_event_loop().
01102 {
01103 return this->implementation ()->post_wakeup_completions (how_many);
01104 }
|
|
|
Resets the <ACE_Proactor::end_event_loop_> static so that the method can be restarted. Definition at line 554 of file Proactor.cpp. References ACE_GUARD_RETURN, ACE_TRACE, and end_event_loop_. Referenced by reset_event_loop().
00555 {
00556 ACE_TRACE ("ACE_Proactor::proactor_reset_event_loop");
00557
00558 // Obtain the lock in the MT environments.
00559 ACE_MT (ACE_GUARD_RETURN (ACE_Thread_Mutex, ace_mon, mutex_, -1));
00560
00561 this->end_event_loop_ = 0;
00562 return 0;
00563 }
|
|
||||||||||||
|
Run the event loop until the <ACE_Proactor::handle_events> method returns -1, the method is invoked, or the expires, in which case a 0 is returned. Definition at line 500 of file Proactor.cpp. References ACE_GUARD_RETURN, ACE_TRACE, end_event_loop_, event_loop_thread_count_, handle_events(), PROACTOR_EVENT_HOOK, and proactor_post_wakeup_completions().
00502 {
00503 ACE_TRACE ("ACE_Proactor::proactor_run_event_loop");
00504 int result = 0;
00505
00506 {
00507 ACE_MT (ACE_GUARD_RETURN (ACE_Thread_Mutex, ace_mon, mutex_, -1));
00508
00509 // Early check. It is ok to do this without lock, since we care just
00510 // whether it is zero or non-zero.
00511 if (this->end_event_loop_ != 0
00512 || tv == ACE_Time_Value::zero)
00513 return 0;
00514
00515 // First time you are in. Increment the thread count.
00516 this->event_loop_thread_count_ ++;
00517 }
00518
00519 // Run the event loop.
00520 for (;;)
00521 {
00522 // Check the end loop flag. It is ok to do this without lock,
00523 // since we care just whether it is zero or non-zero.
00524 if (this->end_event_loop_ != 0)
00525 break;
00526
00527 // <end_event_loop> is not set. Ready to do <handle_events>.
00528 result = this->handle_events (tv);
00529
00530 if (eh != 0 && (*eh) (this))
00531 continue;
00532
00533 if (result == -1 || result == 0)
00534 break;
00535 }
00536
00537 // Leaving the event loop. Decrement the thread count.
00538
00539 {
00540 ACE_MT (ACE_GUARD_RETURN (ACE_Thread_Mutex, ace_mon, mutex_, -1));
00541
00542 // Decrement the thread count.
00543 this->event_loop_thread_count_ --;
00544
00545 if (this->event_loop_thread_count_ > 0
00546 && this->end_event_loop_ != 0)
00547 this->proactor_post_wakeup_completions (1);
00548 }
00549
00550 return result;
00551 }
|
|
|
Run the event loop until the <ACE_Proactor::handle_events> method returns -1 or the method is invoked. Definition at line 445 of file Proactor.cpp. References ACE_GUARD_RETURN, ACE_TRACE, end_event_loop_, event_loop_thread_count_, handle_events(), PROACTOR_EVENT_HOOK, and proactor_post_wakeup_completions(). Referenced by run_event_loop().
00446 {
00447 ACE_TRACE ("ACE_Proactor::proactor_run_event_loop");
00448 int result = 0;
00449
00450 {
00451 ACE_MT (ACE_GUARD_RETURN (ACE_Thread_Mutex, ace_mon, mutex_, -1));
00452
00453 // Early check. It is ok to do this without lock, since we care just
00454 // whether it is zero or non-zero.
00455 if (this->end_event_loop_ != 0)
00456 return 0;
00457
00458 // First time you are in. Increment the thread count.
00459 this->event_loop_thread_count_ ++;
00460 }
00461
00462 // Run the event loop.
00463 for (;;)
00464 {
00465 // Check the end loop flag. It is ok to do this without lock,
00466 // since we care just whether it is zero or non-zero.
00467 if (this->end_event_loop_ != 0)
00468 break;
00469
00470 // <end_event_loop> is not set. Ready to do <handle_events>.
00471 result = this->handle_events ();
00472
00473 if (eh != 0 && (*eh) (this))
00474 continue;
00475
00476 if (result == -1)
00477 break;
00478 }
00479
00480 // Leaving the event loop. Decrement the thread count.
00481
00482 {
00483 // Obtain the lock in the MT environments.
00484 ACE_MT (ACE_GUARD_RETURN (ACE_Thread_Mutex, ace_mon, mutex_, -1));
00485
00486 // Decrement the thread count.
00487 this->event_loop_thread_count_ --;
00488
00489 if (this->event_loop_thread_count_ > 0
00490 && this->end_event_loop_ != 0)
00491 this->proactor_post_wakeup_completions (1);
00492 }
00493
00494 return result;
00495 }
|
|
||||||||||||
|
This method adds the to the I/O completion port. This function is a no-op function for Unix systems and returns 0; Definition at line 637 of file Proactor.cpp. References implementation(), and ACE_Proactor_Impl::register_handle().
00639 {
00640 return this->implementation ()->register_handle (handle,
00641 completion_key);
00642 }
|
|
|
Resets the <ACE_Proactor::end_event_loop_> static so that the method can be restarted. Definition at line 33 of file Proactor.inl. References ACE_TRACE, instance(), and proactor_reset_event_loop().
00034 {
00035 ACE_TRACE ("ACE_Proactor::reset_event_loop");
00036 ACE_Proactor * const p = ACE_Proactor::instance ();
00037
00038 if (p == 0)
00039 return -1;
00040
00041 return p->proactor_reset_event_loop ();
00042 }
|
|
|
Run the event loop until the <ACE_Proactor::handle_events> method returns -1, the method is invoked, or the expires, in which case 0 is returned. Definition at line 20 of file Proactor.inl. References ACE_TRACE, check_reconfiguration(), instance(), and proactor_run_event_loop().
00021 {
00022 ACE_TRACE ("ACE_Proactor::run_event_loop (tv)");
00023 ACE_Proactor * const p = ACE_Proactor::instance ();
00024
00025 if (p == 0)
00026 return -1;
00027
00028 return p->proactor_run_event_loop
00029 (tv, ACE_Proactor::check_reconfiguration);
00030 }
|
|
|
Run the event loop until the <ACE_Proactor::handle_events> method returns -1 or the method is invoked. Definition at line 8 of file Proactor.inl. References ACE_TRACE, check_reconfiguration(), instance(), and proactor_run_event_loop().
00009 {
00010 ACE_TRACE ("ACE_Proactor::run_event_loop");
00011 ACE_Proactor * const p = ACE_Proactor::instance ();
00012
00013 if (p == 0)
00014 return -1;
00015
00016 return p->proactor_run_event_loop (ACE_Proactor::check_reconfiguration);
00017 }
|
|
||||||||||||||||
|
Definition at line 656 of file Proactor.cpp. References schedule_timer().
00659 {
00660 return this->schedule_timer (handler,
00661 act,
00662 interval,
00663 interval);
00664 }
|
|
||||||||||||||||||||
|
This combines the above two methods into one. Mostly for backward compatibility. Definition at line 667 of file Proactor.cpp. References ACE_GUARD_RETURN, ACE_SYNCH_RECURSIVE_MUTEX, ACE_Event::signal(), ACE_Proactor_Timer_Handler::timer_event_, and timer_handler_.
00671 {
00672 // absolute time.
00673 ACE_Time_Value absolute_time =
00674 this->timer_queue_->gettimeofday () + time;
00675
00676 // Only one guy goes in here at a time
00677 ACE_MT (ACE_GUARD_RETURN (ACE_SYNCH_RECURSIVE_MUTEX,
00678 ace_mon,
00679 this->timer_queue_->mutex (),
00680 -1));
00681
00682 // Schedule the timer
00683 long result = this->timer_queue_->schedule (&handler,
00684 act,
00685 absolute_time,
00686 interval);
00687 if (result != -1)
00688 {
00689 // no failures: check to see if we are the earliest time
00690 if (this->timer_queue_->earliest_time () == absolute_time)
00691
00692 // wake up the timer thread
00693 if (this->timer_handler_->timer_event_.signal () == -1)
00694 {
00695 // Cancel timer
00696 this->timer_queue_->cancel (result);
00697 result = -1;
00698 }
00699 }
00700 return result;
00701 }
|
|
||||||||||||||||
|
Schedule a that will expire after . If it expires then is passed in as the value to the 's callback method. This method returns a . This can be used to cancel a timer before it expires. The cancellation ensures that are unique up to values of greater than 2 billion timers. As long as timers don't stay around longer than this there should be no problems with accidentally deleting the wrong timer. Returns -1 on failure (which is guaranteed never to be a valid ). Definition at line 645 of file Proactor.cpp. Referenced by schedule_repeating_timer().
00648 {
00649 return this->schedule_timer (handler,
00650 act,
00651 time,
00652 ACE_Time_Value::zero);
00653 }
|
|
|
Set timer queue.
Definition at line 768 of file Proactor.cpp. References ACE_NEW, and TIMER_HEAP.
00769 {
00770 // Cleanup old timer queue.
00771 if (this->delete_timer_queue_)
00772 {
00773 delete this->timer_queue_;
00774 this->delete_timer_queue_ = 0;
00775 }
00776
00777 // New timer queue.
00778 if (tq == 0)
00779 {
00780 ACE_NEW (this->timer_queue_,
00781 TIMER_HEAP);
00782 this->delete_timer_queue_ = 1;
00783 }
00784 else
00785 {
00786 this->timer_queue_ = tq;
00787 this->delete_timer_queue_ = 0;
00788 }
00789
00790 // Set the proactor in the timer queue's functor
00791 this->timer_queue_->upcall_functor ().proactor (*this);
00792 }
|
|
|
Get timer queue.
Definition at line 762 of file Proactor.cpp. Referenced by ACE_Proactor(), and ACE_Proactor_Timer_Handler::svc().
00763 {
00764 return this->timer_queue_;
00765 }
|
|
|
Add wakeup dispatch threads (reinit).
Definition at line 738 of file Proactor.cpp.
00739 {
00740 return 0;
00741 }
|
|
|
Timer handler runs a thread and manages the timers, on behalf of the Proactor. Definition at line 171 of file Proactor.h. |
|
|
Flag used to indicate whether we are responsible for cleaning up the implementation instance. Definition at line 602 of file Proactor.h. |
|
|
Must delete the if non-0. Controls whether the Proactor is deleted when we shut down (we can only delete it safely if we created it!) Definition at line 48 of file Proactor.cpp. Referenced by close_singleton(), and instance(). |
|
|
Flag on whether to delete the timer queue.
Definition at line 620 of file Proactor.h. |
|
|
Terminate the proactor event loop.
Definition at line 623 of file Proactor.h. Referenced by proactor_end_event_loop(), proactor_event_loop_done(), proactor_reset_event_loop(), and proactor_run_event_loop(). |
|
|
Number of threads in the event loop.
Definition at line 626 of file Proactor.h. Referenced by proactor_end_event_loop(), and proactor_run_event_loop(). |
|
|
Delegation/implementation class that all methods will be forwarded to. Definition at line 598 of file Proactor.h. |
|
|
Mutex to protect work with lists.
Definition at line 629 of file Proactor.h. |
|
|
Pointer to a process-wide .
Definition at line 44 of file Proactor.cpp. Referenced by close_singleton(), and instance(). |
|
|
This will manage the thread in the Timer_Handler.
Definition at line 614 of file Proactor.h. |
|
|
Handles timeout events.
Definition at line 611 of file Proactor.h. Referenced by ACE_Proactor(), close(), and schedule_timer(). |
|
|
Timer Queue.
Definition at line 617 of file Proactor.h. |
 1.3.6
1.3.6