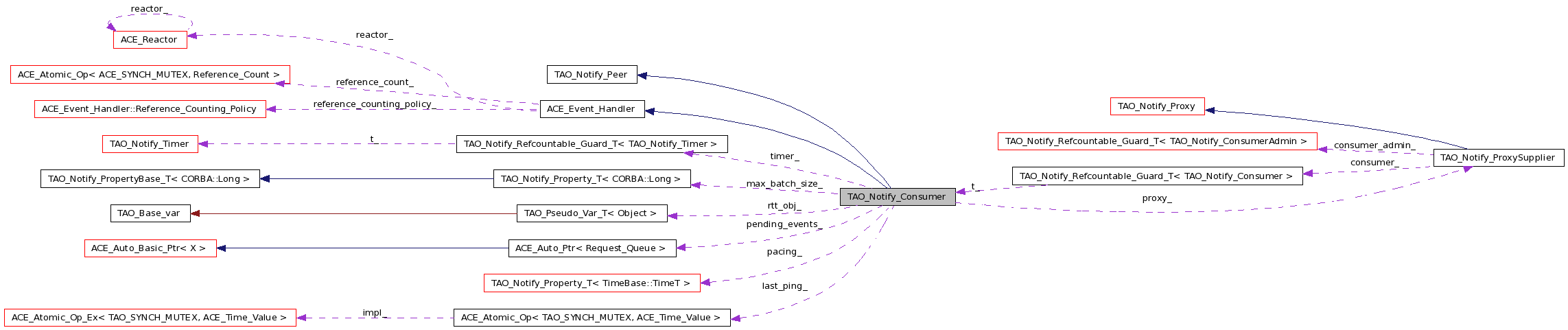
Astract Base class for wrapping consumer objects that connect to the EventChannel. More...
#include <Consumer.h>

Public Types | |
| enum | DispatchStatus { DISPATCH_SUCCESS, DISPATCH_RETRY, DISPATCH_DISCARD, DISPATCH_FAIL, DISPATCH_FAIL_TIMEOUT } |
Status returned from dispatch attempts. More... | |
| typedef TAO_Notify_Refcountable_Guard_T < TAO_Notify_Consumer > | Ptr |
Public Member Functions | |
| TAO_Notify_Consumer (TAO_Notify_ProxySupplier *proxy) | |
| Constructor. | |
| virtual | ~TAO_Notify_Consumer () |
| Destructor. | |
| CORBA::ULong | _incr_refcnt (void) |
| This method sigantures deliberately match the RefCounting methods required for ESF Proxy. | |
| CORBA::ULong | _decr_refcnt (void) |
| TAO_Notify_ProxySupplier * | proxy_supplier (void) |
| Access Specific Proxy. | |
| virtual TAO_Notify_Proxy * | proxy (void) |
| Access Base Proxy. | |
| void | deliver (TAO_Notify_Method_Request_Event *request) |
| Dispatch Event to consumer. | |
| virtual void | push (const CORBA::Any &event)=0 |
| Push event to this consumer. | |
| virtual void | push (const CosNotification::StructuredEvent &event)=0 |
| Push event to this consumer. | |
| virtual void | push (const CosNotification::EventBatch &event)=0 |
| Push a batch of events to this consumer. | |
| DispatchStatus | dispatch_batch (const CosNotification::EventBatch &batch) |
| Dispatch the batch of events to the attached consumer. | |
| void | dispatch_pending (void) |
| Dispatch the pending events. | |
| CORBA::Boolean | is_suspended (void) |
| Is the connection suspended? | |
| void | suspend (void) |
| Suspend Connection. | |
| void | resume (void) |
| Resume Connection. | |
| virtual void | shutdown (void) |
| Shutdown the consumer. | |
| virtual void | reconnect_from_consumer (TAO_Notify_Consumer *old_consumer)=0 |
| virtual void | qos_changed (const TAO_Notify_QoSProperties &qos_properties) |
| Override, Peer::qos_changed. | |
| void | assume_pending_events (TAO_Notify_Consumer &rhs) |
| bool | is_alive (bool allow_nil_consumer) |
| Is the connected consumer still around? | |
| size_t | pending_count (void) |
Protected Types | |
| typedef ACE_Unbounded_Queue < TAO_Notify_Method_Request_Event_Queueable * > | Request_Queue |
Protected Member Functions | |
| virtual CORBA::Object_ptr | get_consumer (void)=0 |
| DispatchStatus | dispatch_request (TAO_Notify_Method_Request_Event *request) |
| virtual bool | dispatch_from_queue (Request_Queue &requests, ACE_Guard< TAO_SYNCH_MUTEX > &ace_mon) |
| Attempt to dispatch event from a queue. | |
| void | enqueue_request (TAO_Notify_Method_Request_Event *request) |
| virtual bool | enqueue_if_necessary (TAO_Notify_Method_Request_Event *request) |
| virtual void | dispatch_updates_i (const CosNotification::EventTypeSeq &added, const CosNotification::EventTypeSeq &removed) |
| TAO_SYNCH_MUTEX * | proxy_lock (void) |
| Get the shared Proxy Lock. | |
| virtual int | handle_timeout (const ACE_Time_Value ¤t_time, const void *act=0) |
| void | schedule_timer (bool is_error=false) |
| Schedule timer. | |
| void | cancel_timer (void) |
| Cancel timer. | |
| Request_Queue & | pending_events () |
| = Protected Data Members | |
Protected Attributes | |
| TAO_Notify_ProxySupplier * | proxy_ |
| The Proxy that we associate with. | |
| CORBA::Boolean | is_suspended_ |
| Suspended Flag. | |
| CosNotifyComm::NotifyPublish_var | publish_ |
| Interface that accepts offer_changes. | |
| bool | have_not_yet_verified_publish_ |
| const TAO_Notify_Property_Time & | pacing_ |
| The Pacing Interval. | |
| TAO_Notify_Property_Long | max_batch_size_ |
| Max. batch size. | |
| long | timer_id_ |
| Timer Id. | |
| TAO_Notify_Timer::Ptr | timer_ |
| The Timer Manager that we use. | |
| ACE_Atomic_Op< TAO_SYNCH_MUTEX, ACE_Time_Value > | last_ping_ |
Private Attributes | |
| ACE_Auto_Ptr< Request_Queue > | pending_events_ |
| Events pending to be delivered. | |
| CORBA::Object_var | rtt_obj_ |
Astract Base class for wrapping consumer objects that connect to the EventChannel.
Definition at line 44 of file Consumer.h.
Definition at line 61 of file Consumer.h.
typedef ACE_Unbounded_Queue<TAO_Notify_Method_Request_Event_Queueable *> TAO_Notify_Consumer::Request_Queue [protected] |
Definition at line 136 of file Consumer.h.
Status returned from dispatch attempts.
Definition at line 51 of file Consumer.h.
{
DISPATCH_SUCCESS,
DISPATCH_RETRY, // retry this message
DISPATCH_DISCARD, // discard this message
DISPATCH_FAIL, // discard all messages and disconnect consumer
DISPATCH_FAIL_TIMEOUT // Same as DISPATCH_FAIL, but due to a timeout
};
| TAO_Notify_Consumer::TAO_Notify_Consumer | ( | TAO_Notify_ProxySupplier * | proxy | ) |
Constructor.
Definition at line 34 of file Consumer.cpp.
: proxy_ (proxy) , is_suspended_ (0) , have_not_yet_verified_publish_ (true) , pacing_ (proxy->qos_properties_.pacing_interval ()) , max_batch_size_ (CosNotification::MaximumBatchSize, 0) , timer_id_ (-1) , timer_ (0) { Request_Queue* pending_events = 0; ACE_NEW (pending_events, TAO_Notify_Consumer::Request_Queue ()); this->pending_events_.reset( pending_events ); this->timer_.reset( this->proxy ()->timer () ); // Enable reference counting on the event handler. this->reference_counting_policy ().value ( ACE_Event_Handler::Reference_Counting_Policy::ENABLED); }
| TAO_Notify_Consumer::~TAO_Notify_Consumer | ( | ) | [virtual] |
Destructor.
Definition at line 54 of file Consumer.cpp.
{
if (this->timer_.isSet())
{
this->cancel_timer ();
this->timer_.reset ();
}
}
| CORBA::ULong TAO_Notify_Consumer::_decr_refcnt | ( | void | ) |
Definition at line 70 of file Consumer.cpp.
{
return this->remove_reference();
}
| CORBA::ULong TAO_Notify_Consumer::_incr_refcnt | ( | void | ) |
This method sigantures deliberately match the RefCounting methods required for ESF Proxy.
Definition at line 64 of file Consumer.cpp.
{
return this->add_reference();
}
| void TAO_Notify_Consumer::assume_pending_events | ( | TAO_Notify_Consumer & | rhs | ) |
Take the pending queue from the rhs, cancel it's timer and schedule our timer. The caller should have locked the proxy lock before calling this method.
Definition at line 716 of file Consumer.cpp.
{
// No need to lock the this proxy's lock. It should have been locked
// by the caller.
// If the original consumer has pending events
if (!rhs.pending_events ().is_empty ())
{
// We will take them away and cancel it's timer
this->pending_events_.reset (rhs.pending_events_.release ());
if (rhs.timer_.isSet ())
{
rhs.cancel_timer ();
}
// Schedule a new timer for us, which will use the default
// timer value (unless we have a valid pacing interval).
this->schedule_timer ();
}
if (this->is_suspended()) // double check to avoid race
{
this->cancel_timer();
}
}
| void TAO_Notify_Consumer::cancel_timer | ( | void | ) | [protected] |
Cancel timer.
Definition at line 645 of file Consumer.cpp.
| void TAO_Notify_Consumer::deliver | ( | TAO_Notify_Method_Request_Event * | request | ) |
Dispatch Event to consumer.
Definition at line 163 of file Consumer.cpp.
{
// Increment reference counts (safely) to prevent this object and its proxy
// from being deleted while the push is in progress.
TAO_Notify_Proxy::Ptr proxy_guard (this->proxy ());
bool queued = enqueue_if_necessary (request);
if (!queued)
{
bool from_timeout = false;
DispatchStatus status = this->dispatch_request (request);
switch (status)
{
case DISPATCH_SUCCESS:
{
request->complete ();
break;
}
case DISPATCH_RETRY:
{
if (DEBUG_LEVEL > 1)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("Consumer %d enqueing event %d due ")
ACE_TEXT ("to failed dispatch.\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()));
this->enqueue_request (request);
this->schedule_timer (true);
break;
}
case DISPATCH_DISCARD:
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) Consumer %d: Error during ")
ACE_TEXT ("direct dispatch. Discarding event:%d.\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()
));
request->complete ();
break;
}
case DISPATCH_FAIL_TIMEOUT:
from_timeout = true;
// Fall through
case DISPATCH_FAIL:
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) Consumer %d: Failed during ")
ACE_TEXT ("direct dispatch :%d. Discarding event.\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()
));
request->complete ();
try
{
this->proxy_supplier ()->destroy (from_timeout);
}
catch (const CORBA::Exception&)
{
// todo is there something meaningful we can do here?
;
}
break;
}
}
}
}
| TAO_Notify_Consumer::DispatchStatus TAO_Notify_Consumer::dispatch_batch | ( | const CosNotification::EventBatch & | batch | ) |
Dispatch the batch of events to the attached consumer.
Definition at line 368 of file Consumer.cpp.
{
DispatchStatus result = DISPATCH_SUCCESS;
try
{
this->push (batch);
}
catch (const CORBA::OBJECT_NOT_EXIST& ex)
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer ")
ACE_TEXT ("%d::dispatch_batch() %s\n"),
static_cast<int> (this->proxy ()->id ()),
ex._info ().c_str ()
));
result = DISPATCH_FAIL;
}
catch (const CORBA::TRANSIENT& ex)
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer ")
ACE_TEXT ("%d::dispatch_batch() Transient (minor=%d) %s\n"),
static_cast<int> (this->proxy ()->id ()),
ex.minor (),
ex._info ().c_str ()
));
const CORBA::ULong BITS_5_THRU_12_MASK = 0x00000f80u;
switch (ex.minor () & 0xfffff000u)
{
case CORBA::OMGVMCID:
switch (ex.minor () & 0x00000fffu)
{
case 2: // No usable profile
case 3: // Request cancelled
case 4: // POA destroyed
result = DISPATCH_FAIL;
break;
default:
result = DISPATCH_DISCARD;
}
break;
case TAO::VMCID:
default:
switch (ex.minor () & BITS_5_THRU_12_MASK)
{
case TAO_INVOCATION_SEND_REQUEST_MINOR_CODE:
result = DISPATCH_FAIL;
break;
case TAO_POA_DISCARDING:
case TAO_POA_HOLDING:
default:
result = DISPATCH_RETRY;
} break;
}
}
catch (const CORBA::TIMEOUT& ex)
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer ")
ACE_TEXT ("%u::dispatch_batch() %s\n"),
this->proxy ()->id (),
ex._info().c_str ()
));
result = DISPATCH_FAIL_TIMEOUT;
}
catch (const CORBA::COMM_FAILURE& ex)
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer ")
ACE_TEXT ("%u::dispatch_batch() %s\n"),
this->proxy ()->id (),
ex._info().c_str ()
));
result = DISPATCH_FAIL;
}
catch (const CORBA::SystemException& ex)
{
if (DEBUG_LEVEL > 0)
{
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer ")
ACE_TEXT ("%d::dispatch_batch() SystemException %s\n"),
static_cast<int> (this->proxy ()->id ()),
ex._info ().c_str ()
));
}
result = DISPATCH_DISCARD;
}
catch (const CORBA::Exception&)
{
ACE_ERROR ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer ")
ACE_TEXT ("%d::dispatch_batch() Caught unexpected ")
ACE_TEXT ("exception pushing batch to consumer.\n"),
static_cast<int> (this->proxy ()->id ())
));
result = DISPATCH_DISCARD;
}
return result;
}
| bool TAO_Notify_Consumer::dispatch_from_queue | ( | Request_Queue & | requests, | |
| ACE_Guard< TAO_SYNCH_MUTEX > & | ace_mon | |||
| ) | [protected, virtual] |
Attempt to dispatch event from a queue.
Called by dispatch_pending. Deliver one or more events to the Consumer. If delivery fails, events are left in the queue (or discarded depending on QoS parameters.) Undelivered, undiscarded requests are left at the front of the queue. Overridden in sequence consumer to dispatch as an EventBatch.
Reimplemented in TAO_Notify_SequencePushConsumer.
Definition at line 505 of file Consumer.cpp.
{
bool result = true;
TAO_Notify_Method_Request_Event_Queueable * request;
if (requests.dequeue_head (request) == 0)
{
ace_mon.release ();
DispatchStatus status = this->dispatch_request (request);
switch (status)
{
case DISPATCH_SUCCESS:
{
request->complete ();
request->release ();
result = true;
ace_mon.acquire ();
break;
}
case DISPATCH_RETRY:
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) Consumer %d: Will retry %d\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()
));
ace_mon.acquire ();
requests.enqueue_head (request); // put the failed event back where it was
result = false;
break;
}
case DISPATCH_DISCARD:
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) Consumer %d: Error during ")
ACE_TEXT ("dispatch. Discarding event:%d.\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()
));
request->complete ();
ace_mon.acquire ();
result = true;
break;
}
case DISPATCH_FAIL:
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) Consumer %d: Failed. ")
ACE_TEXT ("Discarding event %d.\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()
));
request->complete ();
ace_mon.acquire ();
while (requests.dequeue_head (request) == 0)
{
ace_mon.release ();
request->complete ();
ace_mon.acquire ();
}
ace_mon.release ();
try
{
this->proxy_supplier ()->destroy ();
}
catch (const CORBA::Exception&)
{
// todo is there something reasonable to do here?
}
ace_mon.acquire ();
result = true;
break;
}
default:
{
ace_mon.acquire ();
result = false;
break;
}
}
}
return result;
}
| void TAO_Notify_Consumer::dispatch_pending | ( | void | ) |
Dispatch the pending events.
Definition at line 475 of file Consumer.cpp.
{
if (DEBUG_LEVEL > 5)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("Consumer %d dispatching pending events. Queue size: %d\n"),
static_cast<int> (this->proxy ()->id ()),
this->pending_events().size ()
));
// lock ourselves in memory for the duration
TAO_Notify_Consumer::Ptr self_grd (this);
// dispatch events until: 1) the queue is empty; 2) the proxy shuts down, or 3) the dispatch fails
ACE_GUARD (TAO_SYNCH_MUTEX, ace_mon, *this->proxy_lock ());
bool ok = true;
while (ok
&& !this->proxy_supplier ()->has_shutdown ()
&& !this->pending_events().is_empty ())
{
if (! dispatch_from_queue ( this->pending_events(), ace_mon))
{
this->schedule_timer (true);
ok = false;
}
}
}
| TAO_Notify_Consumer::DispatchStatus TAO_Notify_Consumer::dispatch_request | ( | TAO_Notify_Method_Request_Event * | request | ) | [protected] |
Definition at line 233 of file Consumer.cpp.
{
DispatchStatus result = DISPATCH_SUCCESS;
try
{
request->event ()->push (this);
if (DEBUG_LEVEL > 8)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("Consumer %d dispatched single event %d.\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()
));
}
catch (const CORBA::OBJECT_NOT_EXIST& ex)
{
if (DEBUG_LEVEL > 0)
{
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer %d::push ")
ACE_TEXT ("(request) %s\n"),
static_cast<int> (this->proxy ()->id ()),
ex._info ().c_str ()
));
}
result = DISPATCH_FAIL;
}
catch (const CORBA::TRANSIENT& ex)
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer %d::push ")
ACE_TEXT ("(request) Transient (minor=%d) %s\n"),
static_cast<int> (this->proxy ()->id ()),
ex.minor (),
ex._info ().c_str ()
));
const CORBA::ULong BITS_5_THRU_12_MASK = 0x00000f80u;
switch (ex.minor () & 0xfffff000u)
{
case CORBA::OMGVMCID:
switch (ex.minor () & 0x00000fffu)
{
case 2: // No usable profile
case 3: // Request cancelled
case 4: // POA destroyed
result = DISPATCH_FAIL;
break;
default:
result = DISPATCH_DISCARD;
}
break;
case TAO::VMCID:
default:
switch (ex.minor () & BITS_5_THRU_12_MASK)
{
case TAO_INVOCATION_SEND_REQUEST_MINOR_CODE:
result = DISPATCH_FAIL;
break;
case TAO_POA_DISCARDING:
case TAO_POA_HOLDING:
default:
result = DISPATCH_RETRY;
} break;
}
}
catch (const CORBA::TIMEOUT& ex)
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer %u::push ")
ACE_TEXT ("(request) %s\n"),
this->proxy ()->id (),
ex._info().c_str ()
));
result = DISPATCH_FAIL_TIMEOUT;
}
catch (const CORBA::COMM_FAILURE& ex)
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer %u::push ")
ACE_TEXT ("(request) %s\n"),
this->proxy ()->id (),
ex._info().c_str ()
));
result = DISPATCH_FAIL;
}
catch (const CORBA::SystemException& ex)
{
if (DEBUG_LEVEL > 0)
{
ACE_DEBUG ((LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer %d::push ")
ACE_TEXT ("(request) SystemException %s\n"),
static_cast<int> (this->proxy ()->id ()),
ex._info ().c_str ()
));
}
result = DISPATCH_DISCARD;
}
catch (const CORBA::Exception&)
{
ACE_ERROR ( (LM_ERROR,
ACE_TEXT ("(%P|%t) TAO_Notify_Consumer %d::push ")
ACE_TEXT ("(request) Caught unexpected exception ")
ACE_TEXT ("pushing event to consumer.\n"),
static_cast<int> (this->proxy ()->id ())
));
result = DISPATCH_DISCARD;
}
// for persistent events that haven't timed out
// convert "FAIL" & "DISCARD" to "RETRY"
// for transient events, convert RETRY to DISCARD (hey, best_effort.)
if (result == DISPATCH_FAIL ||
result == DISPATCH_FAIL_TIMEOUT || result == DISPATCH_DISCARD)
{
if (request->should_retry ())
{
result = DISPATCH_RETRY;
}
}
else if (result == DISPATCH_RETRY)
{
if (! request->should_retry ())
{
result = DISPATCH_DISCARD;
}
}
return result;
}
| void TAO_Notify_Consumer::dispatch_updates_i | ( | const CosNotification::EventTypeSeq & | added, | |
| const CosNotification::EventTypeSeq & | removed | |||
| ) | [protected, virtual] |
Definition at line 691 of file Consumer.cpp.
{
if (this->have_not_yet_verified_publish_)
{
this->have_not_yet_verified_publish_ = false; // no need to check again
if (! this->publish_->_is_a ("IDL:omg.org/CosNotifyComm/NotifyPublish:1.0"))
this->publish_ = CosNotifyComm::NotifyPublish::_nil();
}
if (! CORBA::is_nil (this->publish_.in ()))
this->publish_->offer_change (added, removed);
}
| bool TAO_Notify_Consumer::enqueue_if_necessary | ( | TAO_Notify_Method_Request_Event * | request | ) | [protected, virtual] |
Add request to a queue if necessary. Overridden by sequence consumer to "always" put incoming events into the queue.
Reimplemented in TAO_Notify_SequencePushConsumer.
Definition at line 118 of file Consumer.cpp.
{
ACE_GUARD_RETURN (TAO_SYNCH_MUTEX, ace_mon, *this->proxy_lock (), false);
if (! this->pending_events().is_empty ())
{
if (DEBUG_LEVEL > 3)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("Consumer %d: enqueuing another event. %d\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()
));
TAO_Notify_Event::Ptr event (
request->event ()->queueable_copy ());
TAO_Notify_Method_Request_Event_Queueable * queue_entry;
ACE_NEW_THROW_EX (queue_entry,
TAO_Notify_Method_Request_Event_Queueable (*request,
event),
CORBA::NO_MEMORY ());
this->pending_events().enqueue_tail (queue_entry);
this->schedule_timer (false);
return true;
}
if (this->is_suspended_ == 1)
{
if (DEBUG_LEVEL > 3)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("Suspended Consumer %d enqueing event. %d\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()
));
TAO_Notify_Event::Ptr event (
request->event ()->queueable_copy ());
TAO_Notify_Method_Request_Event_Queueable * queue_entry;
ACE_NEW_THROW_EX (queue_entry,
TAO_Notify_Method_Request_Event_Queueable (*request,
event),
CORBA::NO_MEMORY ());
this->pending_events().enqueue_tail (queue_entry);
this->schedule_timer (false);
return true;
}
return false;
}
| void TAO_Notify_Consumer::enqueue_request | ( | TAO_Notify_Method_Request_Event * | request | ) | [protected] |
Definition at line 96 of file Consumer.cpp.
{
TAO_Notify_Event::Ptr event (
request->event ()->queueable_copy ());
TAO_Notify_Method_Request_Event_Queueable * queue_entry;
ACE_NEW_THROW_EX (queue_entry,
TAO_Notify_Method_Request_Event_Queueable (*request, event),
CORBA::NO_MEMORY ());
if (DEBUG_LEVEL > 3) ACE_DEBUG ( (LM_DEBUG,
ACE_TEXT ("Consumer %d: enqueue_request (%d) @%@.\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence (),
request
));
ACE_GUARD (TAO_SYNCH_MUTEX, ace_mon, *this->proxy_lock ());
this->pending_events().enqueue_tail (queue_entry);
}
| virtual CORBA::Object_ptr TAO_Notify_Consumer::get_consumer | ( | void | ) | [protected, pure virtual] |
This method is called by the is_alive() method. It should provide the connected consumer or nil if there is none.
Implemented in TAO_Notify_PushConsumer, TAO_Notify_SequencePushConsumer, and TAO_Notify_StructuredPushConsumer.
| int TAO_Notify_Consumer::handle_timeout | ( | const ACE_Time_Value & | current_time, | |
| const void * | act = 0 | |||
| ) | [protected, virtual] |
Reimplemented from ACE_Event_Handler.
Definition at line 661 of file Consumer.cpp.
{
if (!this->is_suspended() && this->timer_.isSet() && this->timer_id_ != -1)
{
TAO_Notify_Consumer::Ptr grd (this);
this->timer_id_ = -1; // This must come first, because dispatch_pending may try to resched
try
{
this->dispatch_pending ();
}
catch (...)
{
}
}
return 0;
}
| bool TAO_Notify_Consumer::is_alive | ( | bool | allow_nil_consumer | ) |
Is the connected consumer still around?
Definition at line 742 of file Consumer.cpp.
{
bool status = false;
CORBA::Object_var consumer = this->get_consumer ();
if (CORBA::is_nil (consumer.in ()))
{
// The consumer may not connected or the consumer did
// not provide a callback. In this case, the liveliness
// check should return true so it will be validated in
// next period.
if (allow_nil_consumer)
return true;
else
return status;
}
CORBA::PolicyList policy_list;
try
{
bool do_liveliness_check = false;
ACE_Time_Value now = ACE_OS::gettimeofday ();
if (CORBA::is_nil (this->rtt_obj_.in ()))
{
// We need to determine if the consumer on the other end is still
// alive. Since we may be in an upcall from the owner of the
// original consumer, we have to put a timeout on the call in case
// the client side is not processing ORB requests at this time. In
// the event that the timeout exception occurs, we will assume that
// the original consumer is still around. If we get any other
// exception we will say that the original consumer is not
// available anymore.
TimeBase::TimeT timeout = 10000000;
CORBA::Any timeout_any;
timeout_any <<= timeout;
policy_list.length (1);
policy_list[0] = TAO_Notify_PROPERTIES::instance()->orb()->
create_policy (
Messaging::RELATIVE_RT_TIMEOUT_POLICY_TYPE,
timeout_any);
rtt_obj_ =
consumer->_set_policy_overrides (policy_list,
CORBA::ADD_OVERRIDE);
// Clean up the policy that was allocated in the try/catch
for (CORBA::ULong i = 0; i < policy_list.length (); i++)
policy_list[i]->destroy ();
do_liveliness_check
= (last_ping_ == ACE_Time_Value::zero ? true
: now - last_ping_.value () >= TAO_Notify_PROPERTIES::instance()->validate_client_delay ());
}
else
do_liveliness_check =
now - last_ping_.value () >= TAO_Notify_PROPERTIES::instance()->validate_client_interval ();
if (CORBA::is_nil (rtt_obj_.in ()))
status = false;
else if (do_liveliness_check || allow_nil_consumer)
{
last_ping_ = now;
status = !rtt_obj_->_non_existent ();
}
else
status = true;
}
catch (CORBA::TIMEOUT&)
{
status = true;
}
catch (CORBA::Exception& ex)
{
if (DEBUG_LEVEL > 0)
{
ex._tao_print_exception ("TAO_Notify_Consumer::is_alive: false");
}
}
return status;
}
| CORBA::Boolean TAO_Notify_Consumer::is_suspended | ( | void | ) |
Is the connection suspended?
Definition at line 16 of file Consumer.inl.
{
return this->is_suspended_;
}
| size_t TAO_Notify_Consumer::pending_count | ( | void | ) |
Estimate how many events are pending delivery for this consumer
The estimate does not include events queued at the admin level which have not been passed to this consumer for delivery yet.
Definition at line 28 of file Consumer.inl.
{
return this->pending_events_->size();
}
| TAO_Notify_Consumer::Request_Queue & TAO_Notify_Consumer::pending_events | ( | ) | [protected] |
= Protected Data Members
Definition at line 9 of file Consumer.inl.
{
ACE_ASSERT( pending_events_.get() != 0 );
return *pending_events_;
}
| TAO_Notify_Proxy * TAO_Notify_Consumer::proxy | ( | void | ) | [virtual] |
| TAO_SYNCH_MUTEX * TAO_Notify_Consumer::proxy_lock | ( | void | ) | [protected] |
Get the shared Proxy Lock.
Definition at line 704 of file Consumer.cpp.
| TAO_Notify_ProxySupplier * TAO_Notify_Consumer::proxy_supplier | ( | void | ) |
| virtual void TAO_Notify_Consumer::push | ( | const CosNotification::EventBatch & | event | ) | [pure virtual] |
Push a batch of events to this consumer.
Implemented in TAO_Notify_PushConsumer, TAO_Notify_SequencePushConsumer, and TAO_Notify_StructuredPushConsumer.
| virtual void TAO_Notify_Consumer::push | ( | const CORBA::Any & | event | ) | [pure virtual] |
Push event to this consumer.
Implemented in TAO_Notify_PushConsumer, TAO_Notify_SequencePushConsumer, and TAO_Notify_StructuredPushConsumer.
| virtual void TAO_Notify_Consumer::push | ( | const CosNotification::StructuredEvent & | event | ) | [pure virtual] |
Push event to this consumer.
Implemented in TAO_Notify_PushConsumer, TAO_Notify_SequencePushConsumer, and TAO_Notify_StructuredPushConsumer.
| void TAO_Notify_Consumer::qos_changed | ( | const TAO_Notify_QoSProperties & | qos_properties | ) | [virtual] |
Override, Peer::qos_changed.
Definition at line 82 of file Consumer.cpp.
{
this->max_batch_size_ = qos_properties.maximum_batch_size ();
}
| virtual void TAO_Notify_Consumer::reconnect_from_consumer | ( | TAO_Notify_Consumer * | old_consumer | ) | [pure virtual] |
On reconnect we need to move events from the old consumer to the new one
Implemented in TAO_Notify_PushConsumer, TAO_Notify_SequencePushConsumer, and TAO_Notify_StructuredPushConsumer.
| void TAO_Notify_Consumer::resume | ( | void | ) |
Resume Connection.
Definition at line 88 of file Consumer.cpp.
{
this->is_suspended_ = 0;
this->dispatch_pending ();
}
| void TAO_Notify_Consumer::schedule_timer | ( | bool | is_error = false |
) | [protected] |
Schedule timer.
Definition at line 594 of file Consumer.cpp.
{
if (this->timer_id_ != -1)
{
return; // We only want a single timeout scheduled.
}
// don't schedule timer if there's nothing that can be done
if (this->is_suspended ())
{
return;
}
ACE_ASSERT (this->timer_.get() != 0);
// If we're scheduling the timer due to an error then we want to
// use the retry timeout, otherwise we'll assume that the pacing
// interval is sufficient for now.
ACE_Time_Value tv (DEFAULT_RETRY_TIMEOUT);
if (! is_error)
{
if (this->pacing_.is_valid ())
{
tv = ORBSVCS_Time::to_Time_Value (this->pacing_.value ());
}
}
if (DEBUG_LEVEL > 5)
{
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("Consumer %d: scheduling pacing/retry for %dms.\n"),
static_cast<int> (this->proxy ()->id ()), tv.msec ()));
}
this->timer_id_ =
this->timer_->schedule_timer (this, tv, ACE_Time_Value::zero);
if (this->timer_id_ == -1)
{
ACE_ERROR ((LM_ERROR,
ACE_TEXT ("TAO_Notify_Consumer %d::schedule_timer () ")
ACE_TEXT ("Error scheduling timer.\n"),
static_cast<int> (this->proxy ()->id ())
));
}
if (this->is_suspended()) // double check to avoid race
{
this->cancel_timer();
}
}
| void TAO_Notify_Consumer::shutdown | ( | void | ) | [virtual] |
Shutdown the consumer.
Definition at line 680 of file Consumer.cpp.
| void TAO_Notify_Consumer::suspend | ( | void | ) |
bool TAO_Notify_Consumer::have_not_yet_verified_publish_ [protected] |
Definition at line 192 of file Consumer.h.
CORBA::Boolean TAO_Notify_Consumer::is_suspended_ [protected] |
Suspended Flag.
Definition at line 188 of file Consumer.h.
ACE_Atomic_Op<TAO_SYNCH_MUTEX, ACE_Time_Value> TAO_Notify_Consumer::last_ping_ [protected] |
Last time either push an event or validate connection via _non_exist call.
Definition at line 208 of file Consumer.h.
Max. batch size.
Definition at line 198 of file Consumer.h.
const TAO_Notify_Property_Time& TAO_Notify_Consumer::pacing_ [protected] |
The Pacing Interval.
Definition at line 195 of file Consumer.h.
Events pending to be delivered.
Definition at line 213 of file Consumer.h.
TAO_Notify_ProxySupplier* TAO_Notify_Consumer::proxy_ [protected] |
The Proxy that we associate with.
Definition at line 185 of file Consumer.h.
CosNotifyComm::NotifyPublish_var TAO_Notify_Consumer::publish_ [protected] |
Interface that accepts offer_changes.
Definition at line 191 of file Consumer.h.
Definition at line 215 of file Consumer.h.
TAO_Notify_Timer::Ptr TAO_Notify_Consumer::timer_ [protected] |
The Timer Manager that we use.
Definition at line 204 of file Consumer.h.
long TAO_Notify_Consumer::timer_id_ [protected] |
Timer Id.
Definition at line 201 of file Consumer.h.
 1.7.0
1.7.0

