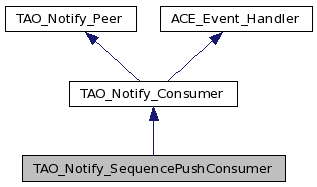
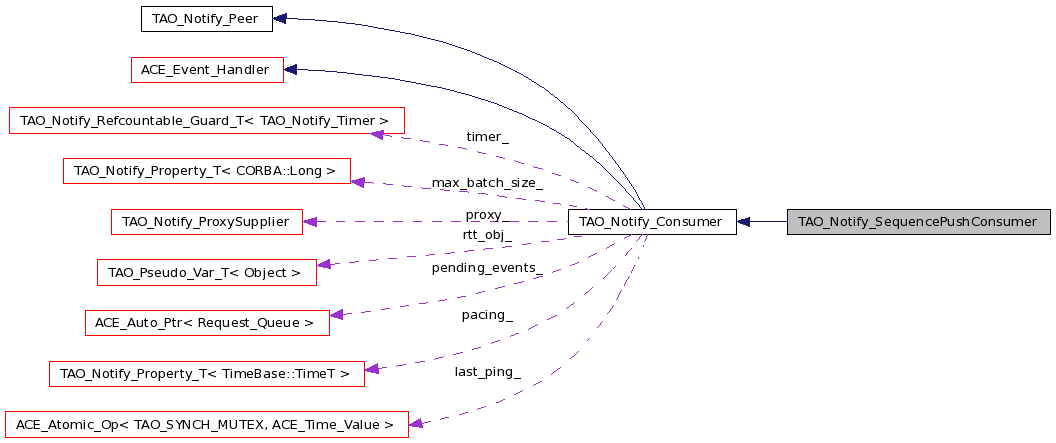
#include <SequencePushConsumer.h>
Public Member Functions | |
| TAO_Notify_SequencePushConsumer (TAO_Notify_ProxySupplier *proxy) | |
| virtual | ~TAO_Notify_SequencePushConsumer () |
| void | init (CosNotifyComm::SequencePushConsumer_ptr push_consumer) |
| Init the Consumer. | |
| virtual bool | enqueue_if_necessary (TAO_Notify_Method_Request_Event *request) |
| virtual bool | dispatch_from_queue (Request_Queue &requests, ACE_Guard< TAO_SYNCH_MUTEX > &ace_mon) |
| Attempt to dispatch event from a queue. | |
| virtual void | push (const CORBA::Any &event) |
| Push <event> to this consumer. | |
| virtual void | push (const CosNotification::StructuredEvent &event) |
| Push event to this consumer. | |
| virtual void | push (const CosNotification::EventBatch &event) |
| Push a batch of events to this consumer. | |
| virtual ACE_CString | get_ior (void) const |
| Retrieve the ior of this peer. | |
| virtual void | reconnect_from_consumer (TAO_Notify_Consumer *old_consumer) |
Protected Member Functions | |
| virtual CORBA::Object_ptr | get_consumer (void) |
Protected Attributes | |
| CosNotifyComm::SequencePushConsumer_var | push_consumer_ |
| The Consumer. | |
Private Member Functions | |
| virtual void | release (void) |
| TAO_Notify_Destroy_Callback methods. | |
Definition at line 42 of file SequencePushConsumer.h.
| TAO_Notify_SequencePushConsumer::TAO_Notify_SequencePushConsumer | ( | TAO_Notify_ProxySupplier * | proxy | ) |
Definition at line 28 of file SequencePushConsumer.cpp.
: TAO_Notify_Consumer (proxy) { }
| TAO_Notify_SequencePushConsumer::~TAO_Notify_SequencePushConsumer | ( | ) | [virtual] |
Definition at line 33 of file SequencePushConsumer.cpp.
{
}
| bool TAO_Notify_SequencePushConsumer::dispatch_from_queue | ( | Request_Queue & | requests, | |
| ACE_Guard< TAO_SYNCH_MUTEX > & | ace_mon | |||
| ) | [virtual] |
Attempt to dispatch event from a queue.
Called by dispatch_pending. Deliver one or more events to the Consumer. If delivery fails, events are left in the queue (or discarded depending on QoS parameters.) Undelivered, undiscarded requests are left at the front of the queue. Overridden in sequence consumer to dispatch as an EventBatch.
Reimplemented from TAO_Notify_Consumer.
Definition at line 100 of file SequencePushConsumer.cpp.
{
bool result = true;
if (DEBUG_LEVEL > 0)
{
ACE_DEBUG ( (LM_DEBUG,
ACE_TEXT ("(%P|%t) SequencePushConsumer dispatch queued requests. queue size:%u\n"),
requests.size ()));
}
CORBA::ULong queue_size = ACE_Utils::truncate_cast<CORBA::ULong> (requests.size ());
CORBA::Long max_batch_size = queue_size;
if (this->max_batch_size_.is_valid () )
{
max_batch_size = this->max_batch_size_.value ();
}
CORBA::Long batch_size = queue_size;
if (batch_size > max_batch_size)
{
batch_size = max_batch_size;
}
if (batch_size > 0)
{
CosNotification::EventBatch batch (batch_size);
batch.length (batch_size);
Request_Queue completed;
CORBA::Long pos = 0;
TAO_Notify_Method_Request_Event_Queueable * request = 0;
while (pos < batch_size && requests.dequeue_head (request) == 0)
{
if (DEBUG_LEVEL > 0)
{
ACE_DEBUG ( (LM_DEBUG,
ACE_TEXT ("(%P|%t) Sequence Dispatch Method_Request_Dispatch @%@\n"),
request));
}
const TAO_Notify_Event * ev = request->event ();
ev->convert (batch [pos]);
++pos;
// note enqueue at head, use queue as stack.
completed.enqueue_head (request);
}
batch.length (pos);
ACE_ASSERT (pos > 0);
ace_mon.release ();
bool from_timeout = false;
TAO_Notify_Consumer::DispatchStatus status =
this->dispatch_batch (batch);
ace_mon.acquire ();
switch (status)
{
case DISPATCH_SUCCESS:
{
TAO_Notify_Method_Request_Event_Queueable * request = 0;
while (completed.dequeue_head (request) == 0)
{
request->complete ();
request->release ();
}
result = true;
break;
}
case DISPATCH_FAIL_TIMEOUT:
from_timeout = true;
// Fall through
case DISPATCH_FAIL:
{
TAO_Notify_Method_Request_Event_Queueable * request = 0;
while (completed.dequeue_head (request) == 0)
{
if (request->should_retry ())
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG, ACE_TEXT ("(%P|%t) Consumer %d: Will retry %d\n"),
static_cast <int> (this->proxy ()->id ()),
request->sequence ()));
requests.enqueue_head (request);
result = false;
}
else
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG, ACE_TEXT ("(%P|%t) Consumer %d: Discarding %d\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()));
request->complete ();
request->release ();
}
}
while (requests.dequeue_head (request) == 0)
{
if (request->should_retry ())
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG, ACE_TEXT ("(%P|%t) Consumer %d: Will retry %d\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()));
requests.enqueue_head (request);
result = false;
}
else
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG, ACE_TEXT ("(%P|%t) Consumer %d: Discarding %d\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()));
request->complete ();
request->release ();
}
}
ace_mon.release();
try
{
this->proxy_supplier ()->destroy (from_timeout);
}
catch (const CORBA::Exception&)
{
// todo is there something meaningful we can do here?
;
}
ace_mon.acquire();
break;
}
case DISPATCH_RETRY:
case DISPATCH_DISCARD:
{
TAO_Notify_Method_Request_Event_Queueable * request = 0;
while (completed.dequeue_head (request) == 0)
{
if (request->should_retry ())
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG, ACE_TEXT ("(%P|%t) Consumer %d: Will retry %d\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()));
requests.enqueue_head (request);
result = false;
}
else
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ((LM_DEBUG, ACE_TEXT ("(%P|%t) Consumer %d: Discarding %d\n"),
static_cast<int> (this->proxy ()->id ()),
request->sequence ()));
request->complete ();
request->release ();
}
}
break;
}
default:
{
result = false;
break;
}
}
}
return result;
}
| bool TAO_Notify_SequencePushConsumer::enqueue_if_necessary | ( | TAO_Notify_Method_Request_Event * | request | ) | [virtual] |
Add request to a queue if necessary. for Sequence it's always necessary.
Reimplemented from TAO_Notify_Consumer.
Definition at line 266 of file SequencePushConsumer.cpp.
{
if (DEBUG_LEVEL > 0)
ACE_DEBUG ( (LM_DEBUG, "SequencePushConsumer enqueing event.\n"));
this->enqueue_request (request);
size_t mbs = static_cast<size_t>(this->max_batch_size_.value());
if (this->pending_events().size() >= mbs || this->pacing_.is_valid () == 0)
{
this->dispatch_pending ();
}
else
{
schedule_timer (false);
}
return true;
}
| CORBA::Object_ptr TAO_Notify_SequencePushConsumer::get_consumer | ( | void | ) | [protected, virtual] |
This method is called by the is_alive() method. It should provide the connected consumer or nil if there is none.
Implements TAO_Notify_Consumer.
Definition at line 340 of file SequencePushConsumer.cpp.
{
return CosNotifyComm::SequencePushConsumer::_duplicate (this->push_consumer_.in ());
}
| ACE_CString TAO_Notify_SequencePushConsumer::get_ior | ( | void | ) | const [virtual] |
Retrieve the ior of this peer.
Definition at line 314 of file SequencePushConsumer.cpp.
{
ACE_CString result;
CORBA::ORB_var orb = TAO_Notify_PROPERTIES::instance ()->orb ();
try
{
CORBA::String_var ior = orb->object_to_string (this->push_consumer_.in ());
result = static_cast<const char*> (ior.in ());
}
catch (const CORBA::Exception&)
{
result.fast_clear();
}
return result;
}
| void TAO_Notify_SequencePushConsumer::init | ( | CosNotifyComm::SequencePushConsumer_ptr | push_consumer | ) |
Init the Consumer.
Definition at line 38 of file SequencePushConsumer.cpp.
{
// Initialize only once
ACE_ASSERT( CORBA::is_nil (this->push_consumer_.in()) );
if (CORBA::is_nil (push_consumer))
{
throw CORBA::BAD_PARAM();
}
if (!TAO_Notify_PROPERTIES::instance()->separate_dispatching_orb ())
{
this->push_consumer_ = CosNotifyComm::SequencePushConsumer::_duplicate (push_consumer);
this->publish_ = CosNotifyComm::NotifyPublish::_duplicate (push_consumer);
}
else
{
// "Port" consumer's object reference from receiving ORB to dispatching ORB.
CORBA::String_var temp =
TAO_Notify_PROPERTIES::instance()->orb()->object_to_string(push_consumer);
CORBA::Object_var obj =
TAO_Notify_PROPERTIES::instance()->dispatching_orb()->string_to_object(temp.in());
try
{
CosNotifyComm::SequencePushConsumer_var new_push_consumer =
CosNotifyComm::SequencePushConsumer::_unchecked_narrow(obj.in());
this->push_consumer_ = CosNotifyComm::SequencePushConsumer::_duplicate (new_push_consumer.in());
this->publish_ = CosNotifyComm::NotifyPublish::_duplicate (new_push_consumer.in());
//--cj verify dispatching ORB
if (TAO_debug_level >= 10)
{
ACE_DEBUG ((LM_DEBUG,
"(%P|%t) Sequence push init dispatching ORB id is %s.\n",
obj->_stubobj()->orb_core()->orbid()));
}
//--cj end
}
catch (const CORBA::TRANSIENT& ex)
{
ex._tao_print_exception (
"Got a TRANSIENT in NS_SequencePushConsumer::init");
ACE_DEBUG ((LM_DEBUG, "(%P|%t) got it for NS_SequencePushConsumer %@\n", this));
}
catch (const CORBA::Exception&)
{
// _narrow failed
}
}
}
| void TAO_Notify_SequencePushConsumer::push | ( | const CORBA::Any & | event | ) | [virtual] |
Push <event> to this consumer.
Implements TAO_Notify_Consumer.
Definition at line 288 of file SequencePushConsumer.cpp.
{
//NOP
}
| void TAO_Notify_SequencePushConsumer::push | ( | const CosNotification::StructuredEvent & | event | ) | [virtual] |
Push event to this consumer.
Implements TAO_Notify_Consumer.
Definition at line 294 of file SequencePushConsumer.cpp.
{
//NOP
}
| void TAO_Notify_SequencePushConsumer::push | ( | const CosNotification::EventBatch & | event | ) | [virtual] |
Push a batch of events to this consumer.
Implements TAO_Notify_Consumer.
Definition at line 301 of file SequencePushConsumer.cpp.
{
//--cj verify dispatching ORB
if (TAO_debug_level >= 10) {
ACE_DEBUG ((LM_DEBUG, "(%P|%t) Sequence push dispatching ORB id is %s.\n",
this->push_consumer_->_stubobj()->orb_core()->orbid()));
}
//--cj end
last_ping_ = ACE_OS::gettimeofday ();
this->push_consumer_->push_structured_events (event_batch);
}
| void TAO_Notify_SequencePushConsumer::reconnect_from_consumer | ( | TAO_Notify_Consumer * | old_consumer | ) | [virtual] |
on reconnect we need to move events from the old consumer to the new one
Implements TAO_Notify_Consumer.
Definition at line 331 of file SequencePushConsumer.cpp.
{
TAO_Notify_SequencePushConsumer* tmp = dynamic_cast<TAO_Notify_SequencePushConsumer *> (old_consumer);
ACE_ASSERT(tmp != 0);
this->init(tmp->push_consumer_.in());
this->schedule_timer(false);
}
| void TAO_Notify_SequencePushConsumer::release | ( | void | ) | [private, virtual] |
TAO_Notify_Destroy_Callback methods.
Definition at line 93 of file SequencePushConsumer.cpp.
{
delete this;
//@@ inform factory
}
CosNotifyComm::SequencePushConsumer_var TAO_Notify_SequencePushConsumer::push_consumer_ [protected] |
The Consumer.
Definition at line 84 of file SequencePushConsumer.h.
 1.7.0
1.7.0

