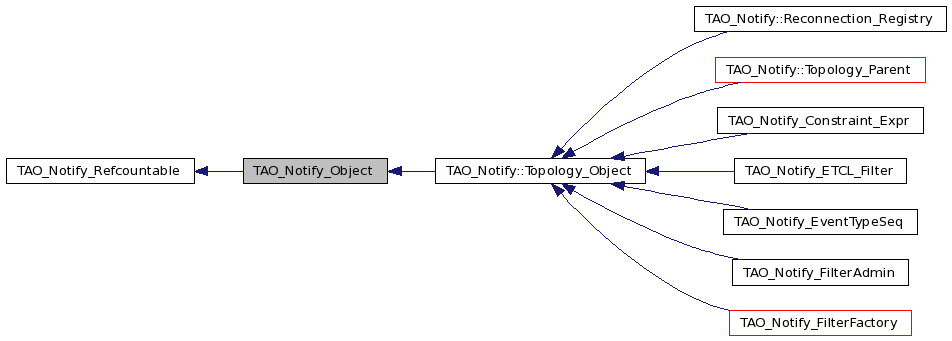
Base Object for RT_Notify's CORBA Objects. More...
#include <Object.h>
Public Types | |
| typedef CORBA::Long | ID |
| Id for Objects. | |
Public Member Functions | |
| virtual | ~TAO_Notify_Object (void) |
| Destructor. | |
| ID | id (void) const |
| This Object's ID. | |
| virtual CORBA::Object_ptr | activate (PortableServer::Servant servant) |
| Activate. | |
| virtual CORBA::Object_ptr | activate (PortableServer::Servant servant, CORBA::Long id) |
| Activate with existing id. | |
| void | deactivate (void) |
| Deactivate. | |
| bool | has_shutdown (void) |
| Have we been shutdown. returns true if shutdown. | |
| void | execute_task (TAO_Notify_Method_Request &method_request) |
| CORBA::Object_ptr | ref (void) |
| Get CORBA Ref. | |
| virtual void | set_qos (const CosNotification::QoSProperties &qos) |
| Set the QoS Properties. | |
| CosNotification::QoSProperties * | get_qos (void) |
| Get the QoS Properties. | |
| bool | find_qos_property_value (const char *name, CosNotification::PropertyValue &value) const |
| virtual TAO_Notify_Timer * | timer (void) |
| Obtain the Timer manager associated with this object. | |
| TAO_Notify_Event_Manager & | event_manager (void) |
| Accessor for the Event Manager. | |
| virtual int | shutdown (void) |
| Shutdown. Returns 1 if the shutdown was already run once before. | |
| virtual void | load_attrs (const TAO_Notify::NVPList &attrs) |
| TAO_Notify_Worker_Task * | get_worker_task (void) |
| Allow access to the underlying worker task. | |
Protected Member Functions | |
| TAO_Notify_Object (void) | |
| Constructor. | |
| void | initialize (TAO_Notify_Object *parent) |
| Init this object with data from <rhs>. | |
| void | inherit_poas (TAO_Notify_Object &parent) |
| Uses the poas from the supplied object. | |
| void | adopt_poa (TAO_Notify_POA_Helper *single) |
| Adopts the supplied poa as all are poas. | |
| void | set_primary_as_proxy_poa () |
| Changes the primary poa to the current proxy poa. | |
| TAO_Notify_POA_Helper * | proxy_poa (void) |
| Accessor for the proxy_poa_. | |
| TAO_Notify_POA_Helper * | object_poa (void) |
| Accessor for the object_poa_. | |
| TAO_Notify_POA_Helper * | poa (void) |
| Get the POA assigned to us. | |
| void | set_event_manager (TAO_Notify_Event_Manager *event_manager) |
| void | set_admin_properties (TAO_Notify_AdminProperties *admin_properties) |
| TAO_Notify_AdminProperties & | admin_properties (void) |
| Accessor for the Admin Properties. | |
| virtual void | qos_changed (const TAO_Notify_QoSProperties &qos_properties) |
| virtual void | save_attrs (TAO_Notify::NVPList &attrs) |
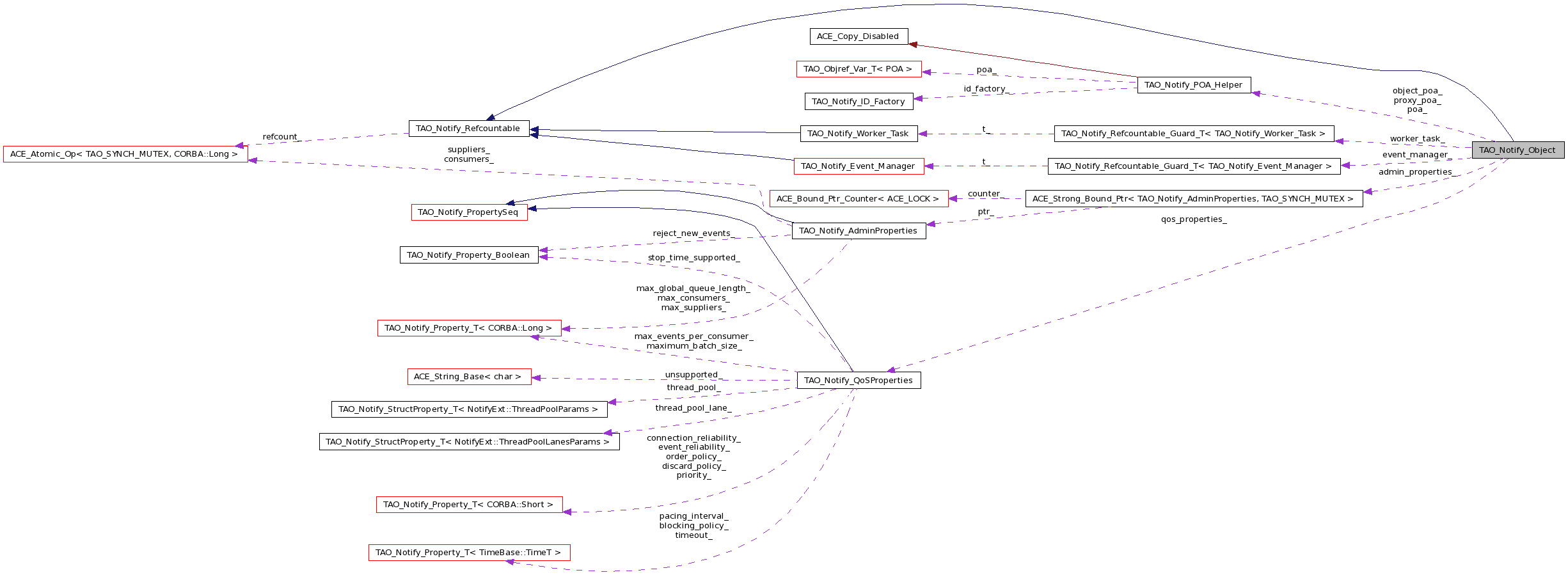
Protected Attributes | |
| TAO_Notify_QoSProperties | qos_properties_ |
| = Protected data members. | |
| TAO_SYNCH_MUTEX | lock_ |
| The mutex to serialize access to state variables. | |
Private Member Functions | |
| void | set_worker_task (TAO_Notify_Worker_Task *worker_task) |
| Set Worker Task. This object assume ownership of the set object. | |
| void | set_proxy_poa (TAO_Notify_POA_Helper *proxy_poa) |
| Setting the proxy_poa_ gives ownership to this class. | |
| void | set_object_poa (TAO_Notify_POA_Helper *object_poa) |
| Setting the object_poa_ gives ownership to this class. | |
| void | set_poa (TAO_Notify_POA_Helper *object_poa) |
| Setting the object_poa_ gives ownership to this class. | |
| void | shutdown_worker_task (void) |
| Shutdown the current worker task and delete it if we own it. | |
| void | destroy_proxy_poa (void) |
| Shutdown the current proxy poa. | |
| void | destroy_object_poa (void) |
| Shutdown the current object poa. | |
| void | destroy_poa (void) |
| Shutdown the current poa. | |
Private Attributes | |
| TAO_Notify_POA_Helper * | poa_ |
| The POA in which the object is activated. | |
| TAO_Notify_POA_Helper * | proxy_poa_ |
| The POA in which the proxys are activated. | |
| bool | own_proxy_poa_ |
| TAO_Notify_POA_Helper * | object_poa_ |
| The POA in which the object's children are activated. | |
| bool | own_object_poa_ |
| ID | id_ |
| Id assigned to this object. | |
| TAO_Notify_Refcountable_Guard_T < TAO_Notify_Event_Manager > | event_manager_ |
| TAO_Notify_AdminProperties::Ptr | admin_properties_ |
| Admin Properties. | |
| TAO_Notify_Worker_Task::Ptr | worker_task_ |
| Worker Task. | |
| bool | own_worker_task_ |
| bool | shutdown_ |
| Are we shutdown (i,e. scheduled for destroy). | |
Friends | |
| class | TAO_Notify_Builder |
| class | TAO_Notify_RT_Builder |
Base Object for RT_Notify's CORBA Objects.
Definition at line 47 of file Object.h.
| typedef CORBA::Long TAO_Notify_Object::ID |
| TAO_Notify_Object::~TAO_Notify_Object | ( | void | ) | [virtual] |
Destructor.
Definition at line 35 of file Object.cpp.
{
if (TAO_debug_level > 2 )
ACE_DEBUG ((LM_DEBUG,"object:%x destroyed\n", this ));
this->destroy_proxy_poa ();
this->destroy_object_poa ();
this->destroy_poa ();
}
| TAO_Notify_Object::TAO_Notify_Object | ( | void | ) | [protected] |
Constructor.
Definition at line 21 of file Object.cpp.
: poa_ (0) , proxy_poa_ (0) , own_proxy_poa_ (false) , object_poa_ (0) , own_object_poa_ (false) , id_ (0) , own_worker_task_ (false) , shutdown_ (false) { if (TAO_debug_level > 2 ) ACE_DEBUG ((LM_DEBUG,"object:%x created\n", this )); }
| CORBA::Object_ptr TAO_Notify_Object::activate | ( | PortableServer::Servant | servant | ) | [virtual] |
Activate.
Definition at line 71 of file Object.cpp.
| CORBA::Object_ptr TAO_Notify_Object::activate | ( | PortableServer::Servant | servant, | |
| CORBA::Long | id | |||
| ) | [virtual] |
Activate with existing id.
Definition at line 78 of file Object.cpp.
{
this->id_ = id;
return this->poa_->activate_with_id (servant, this->id_);
}
| TAO_Notify_AdminProperties & TAO_Notify_Object::admin_properties | ( | void | ) | [protected] |
Accessor for the Admin Properties.
Definition at line 91 of file Object.inl.
{
ACE_ASSERT( this->admin_properties_.get() != 0 );
return *this->admin_properties_;
}
| void TAO_Notify_Object::adopt_poa | ( | TAO_Notify_POA_Helper * | single | ) | [protected] |
Adopts the supplied poa as all are poas.
Definition at line 36 of file Object.inl.
{
ACE_ASSERT( single != 0 );
this->set_proxy_poa( single );
this->set_object_poa( single );
this->set_poa( single );
// Maintain ownership of the poa
}
| void TAO_Notify_Object::deactivate | ( | void | ) |
Deactivate.
Definition at line 88 of file Object.cpp.
{
try
{
this->poa_->deactivate (this->id_);
}
catch (const CORBA::Exception& ex)
{
// Do not propagate any exceptions
if (TAO_debug_level > 2)
{
ex._tao_print_exception ("(%P|%t)\n");
ACE_DEBUG ((LM_DEBUG, "Could not deactivate object %d\n", this->id_));
}
}
}
| void TAO_Notify_Object::destroy_object_poa | ( | void | ) | [private] |
Shutdown the current object poa.
Definition at line 172 of file Object.cpp.
{
if (this->object_poa_ != 0)
{
try
{
if ( this->object_poa_ == this->proxy_poa_ ) this->proxy_poa_ = 0;
if ( this->object_poa_ == this->poa_ ) this->poa_ = 0;
if ( this->own_object_poa_ == true )
{
this->own_object_poa_ = false;
ACE_Auto_Ptr< TAO_Notify_POA_Helper > aop( object_poa_ );
this->object_poa_->destroy ();
}
this->object_poa_ = 0;
}
catch (const CORBA::Exception& ex)
{
if (TAO_debug_level > 2)
ex._tao_print_exception ("Proxy shutdown error (%P|%t)\n");
}
}
}
| void TAO_Notify_Object::destroy_poa | ( | void | ) | [private] |
| void TAO_Notify_Object::destroy_proxy_poa | ( | void | ) | [private] |
Shutdown the current proxy poa.
Definition at line 146 of file Object.cpp.
{
if (this->proxy_poa_ != 0)
{
try
{
if ( this->proxy_poa_ == this->object_poa_ ) this->object_poa_ = 0;
if ( this->proxy_poa_ == this->poa_ ) this->poa_ = 0;
if ( this->own_proxy_poa_ == true )
{
this->own_proxy_poa_ = false;
ACE_Auto_Ptr< TAO_Notify_POA_Helper > app( proxy_poa_ );
this->proxy_poa_->destroy ();
}
this->proxy_poa_ = 0;
}
catch (const CORBA::Exception& ex)
{
if (TAO_debug_level > 2)
ex._tao_print_exception ("Proxy shutdown error (%P|%t)\n");
}
}
}
| TAO_Notify_Event_Manager & TAO_Notify_Object::event_manager | ( | void | ) |
Accessor for the Event Manager.
Definition at line 84 of file Object.inl.
{
ACE_ASSERT( this->event_manager_.get() != 0 );
return *this->event_manager_;
}
| void TAO_Notify_Object::execute_task | ( | TAO_Notify_Method_Request & | method_request | ) |
Definition at line 14 of file Object.inl.
{
TAO_Notify_Worker_Task::Ptr task( this->worker_task_ );
if ( task.isSet() )
{
task->execute( method_request );
}
}
| bool TAO_Notify_Object::find_qos_property_value | ( | const char * | name, | |
| CosNotification::PropertyValue & | value | |||
| ) | const |
Definition at line 300 of file Object.cpp.
{
// qos_properties_ is essentially a map and the find() method returns
// zero on success. We must convert this to a boolean value.
return (this->qos_properties_.find (name, value) == 0);
}
| CosNotification::QoSProperties * TAO_Notify_Object::get_qos | ( | void | ) |
Get the QoS Properties.
Definition at line 286 of file Object.cpp.
{
CosNotification::QoSProperties_var properties;
ACE_NEW_THROW_EX (properties,
CosNotification::QoSProperties (),
CORBA::NO_MEMORY ());
this->qos_properties_.populate (properties);
return properties._retn ();
}
| TAO_Notify_Worker_Task * TAO_Notify_Object::get_worker_task | ( | void | ) |
Allow access to the underlying worker task.
Definition at line 361 of file Object.cpp.
{
return this->worker_task_.get ();
}
| bool TAO_Notify_Object::has_shutdown | ( | void | ) |
Have we been shutdown. returns true if shutdown.
Definition at line 71 of file Object.inl.
{
return this->shutdown_;
}
| CORBA::Long TAO_Notify_Object::id | ( | void | ) | const |
| void TAO_Notify_Object::inherit_poas | ( | TAO_Notify_Object & | parent | ) | [protected] |
Uses the poas from the supplied object.
Definition at line 24 of file Object.inl.
{
this->set_proxy_poa( parent.proxy_poa() );
this->set_object_poa( parent.object_poa() );
this->set_poa( parent.poa() );
// Do not take ownership of parent's poas
own_proxy_poa_ = false;
own_object_poa_ = false;
}
| void TAO_Notify_Object::initialize | ( | TAO_Notify_Object * | parent | ) | [protected] |
Init this object with data from <rhs>.
Definition at line 46 of file Object.cpp.
{
ACE_ASSERT (parent != 0 && this->event_manager_.get() == 0);
// Do not use sets to avoid asserts.
// Object must be able to inherit NULL references
// due to current design.
this->event_manager_ = parent->event_manager_;
this->admin_properties_ = parent->admin_properties_;
this->inherit_poas( *parent );
this->worker_task_ = parent->worker_task_;
// Pass QoS
parent->qos_properties_.transfer (this->qos_properties_);
this->qos_changed (this->qos_properties_);
}
| void TAO_Notify_Object::load_attrs | ( | const TAO_Notify::NVPList & | attrs | ) | [virtual] |
Load our attributes. Each derived type should call the superclass load first before loading its own attributes.
Definition at line 348 of file Object.cpp.
{
attrs.load (this->qos_properties_.event_reliability ());
attrs.load (this->qos_properties_.connection_reliability ());
attrs.load (this->qos_properties_.priority ());
attrs.load (this->qos_properties_.timeout ());
attrs.load (this->qos_properties_.stop_time_supported ());
attrs.load (this->qos_properties_.maximum_batch_size ());
attrs.load (this->qos_properties_.pacing_interval ());
this->qos_properties_.init ();
}
| TAO_Notify_POA_Helper * TAO_Notify_Object::object_poa | ( | void | ) | [protected] |
Accessor for the object_poa_.
Definition at line 59 of file Object.inl.
{
return this->object_poa_;
}
| TAO_Notify_POA_Helper * TAO_Notify_Object::poa | ( | void | ) | [protected] |
| TAO_Notify_POA_Helper * TAO_Notify_Object::proxy_poa | ( | void | ) | [protected] |
| void TAO_Notify_Object::qos_changed | ( | const TAO_Notify_QoSProperties & | qos_properties | ) | [protected, virtual] |
Notification that can be overridden by subclasses to be informed that <qos_properties_> have been modified.
Definition at line 311 of file Object.cpp.
{
// NOP.
}
| CORBA::Object_ptr TAO_Notify_Object::ref | ( | void | ) |
Get CORBA Ref.
Definition at line 125 of file Object.cpp.
{
return this->poa_->id_to_reference (this->id_);
}
| void TAO_Notify_Object::save_attrs | ( | TAO_Notify::NVPList & | attrs | ) | [protected, virtual] |
Called by derived types to save their attributes. Each derived type should call its superclass version before saving its own attrs.
Definition at line 336 of file Object.cpp.
{
add_qos_attr(attrs, this->qos_properties_.event_reliability ());
add_qos_attr(attrs, this->qos_properties_.connection_reliability ());
add_qos_attr(attrs, this->qos_properties_.priority ());
add_qos_attr(attrs, this->qos_properties_.timeout ());
add_qos_attr(attrs, this->qos_properties_.stop_time_supported ());
add_qos_attr(attrs, this->qos_properties_.maximum_batch_size ());
add_qos_attr(attrs, this->qos_properties_.pacing_interval ());
}
| void TAO_Notify_Object::set_admin_properties | ( | TAO_Notify_AdminProperties * | admin_properties | ) | [protected] |
Definition at line 77 of file Object.inl.
{
ACE_ASSERT( admin_properties != 0 );
this->admin_properties_.reset( admin_properties );
}
| void TAO_Notify_Object::set_event_manager | ( | TAO_Notify_Event_Manager * | event_manager | ) | [protected] |
Definition at line 64 of file Object.cpp.
{
ACE_ASSERT( event_manager != 0 );
this->event_manager_.reset( event_manager );
}
| void TAO_Notify_Object::set_object_poa | ( | TAO_Notify_POA_Helper * | object_poa | ) | [private] |
Setting the object_poa_ gives ownership to this class.
Definition at line 228 of file Object.cpp.
{
// shutdown current object poa.
this->destroy_object_poa ();
this->object_poa_ = object_poa;
this->own_object_poa_ = true;
}
| void TAO_Notify_Object::set_poa | ( | TAO_Notify_POA_Helper * | object_poa | ) | [private] |
Setting the object_poa_ gives ownership to this class.
Definition at line 239 of file Object.cpp.
{
this->poa_ = poa;
}
| void TAO_Notify_Object::set_primary_as_proxy_poa | ( | ) | [protected] |
Changes the primary poa to the current proxy poa.
Definition at line 47 of file Object.inl.
| void TAO_Notify_Object::set_proxy_poa | ( | TAO_Notify_POA_Helper * | proxy_poa | ) | [private] |
Setting the proxy_poa_ gives ownership to this class.
Definition at line 217 of file Object.cpp.
{
// shutdown current proxy poa.
this->destroy_proxy_poa ();
this->proxy_poa_ = proxy_poa;
this->own_proxy_poa_ = true;
}
| void TAO_Notify_Object::set_qos | ( | const CosNotification::QoSProperties & | qos | ) | [virtual] |
Set the QoS Properties.
Definition at line 245 of file Object.cpp.
{
CosNotification::PropertyErrorSeq err_seq;
TAO_Notify_QoSProperties new_qos_properties;
if (new_qos_properties.init (qos, err_seq) == -1)
throw CORBA::INTERNAL ();
// Apply the appropriate concurrency QoS
if (new_qos_properties.thread_pool ().is_valid ())
{
if (new_qos_properties.thread_pool ().value ().static_threads == 0)
{
TAO_Notify_PROPERTIES::instance()->builder()->apply_reactive_concurrency (*this);
}
else
{
TAO_Notify_PROPERTIES::instance()->builder()->
apply_thread_pool_concurrency (*this, new_qos_properties.thread_pool ().value ());
}
}
else if (new_qos_properties.thread_pool_lane ().is_valid ())
TAO_Notify_PROPERTIES::instance()->builder()->
apply_lane_concurrency (*this, new_qos_properties.thread_pool_lane ().value ());
// Update the Thread Task's QoS properties..
this->worker_task_->update_qos_properties (new_qos_properties);
// Inform subclasses of QoS changed.
this->qos_changed (new_qos_properties);
// Init the the overall QoS on this object.
if (new_qos_properties.copy (this->qos_properties_) == -1)
throw CORBA::INTERNAL ();
if (err_seq.length () > 0) // Unsupported Property
throw CosNotification::UnsupportedQoS (err_seq);
}
| void TAO_Notify_Object::set_worker_task | ( | TAO_Notify_Worker_Task * | worker_task | ) | [private] |
Set Worker Task. This object assume ownership of the set object.
Definition at line 204 of file Object.cpp.
{
ACE_ASSERT( worker_task != 0 );
// shutdown the current worker.
this->shutdown_worker_task ();
this->worker_task_.reset (worker_task);
this->own_worker_task_ = true;
}
| int TAO_Notify_Object::shutdown | ( | void | ) | [virtual] |
Shutdown. Returns 1 if the shutdown was already run once before.
Definition at line 106 of file Object.cpp.
{
{
ACE_GUARD_RETURN (TAO_SYNCH_MUTEX, ace_mon, this->lock_, 1);
if (this->shutdown_ == 1)
return 1; // Another thread has already run shutdown.
this->shutdown_ = 1;
}
this->deactivate ();
this->shutdown_worker_task ();
return 0;
}
| void TAO_Notify_Object::shutdown_worker_task | ( | void | ) | [private] |
Shutdown the current worker task and delete it if we own it.
Definition at line 131 of file Object.cpp.
{
// Only do this if we are the owner.
TAO_Notify_Worker_Task::Ptr task( this->worker_task_ );
this->worker_task_.reset();
if ( task.isSet() )
{
if ( this->own_worker_task_ )
{
task->shutdown ();
}
}
}
| TAO_Notify_Timer * TAO_Notify_Object::timer | ( | void | ) | [virtual] |
Obtain the Timer manager associated with this object.
Definition at line 317 of file Object.cpp.
{
ACE_ASSERT (worker_task_.get() != 0);
return this->worker_task_->timer ();
}
friend class TAO_Notify_Builder [friend] |
friend class TAO_Notify_RT_Builder [friend] |
TAO_Notify_Refcountable_Guard_T< TAO_Notify_Event_Manager > TAO_Notify_Object::event_manager_ [private] |
The event manager. TAO_Notify_Event_Manager inl includes Object.h
ID TAO_Notify_Object::id_ [private] |
TAO_SYNCH_MUTEX TAO_Notify_Object::lock_ [protected] |
bool TAO_Notify_Object::own_object_poa_ [private] |
bool TAO_Notify_Object::own_proxy_poa_ [private] |
bool TAO_Notify_Object::own_worker_task_ [private] |
TAO_Notify_POA_Helper* TAO_Notify_Object::poa_ [private] |
bool TAO_Notify_Object::shutdown_ [private] |
 1.7.0
1.7.0

