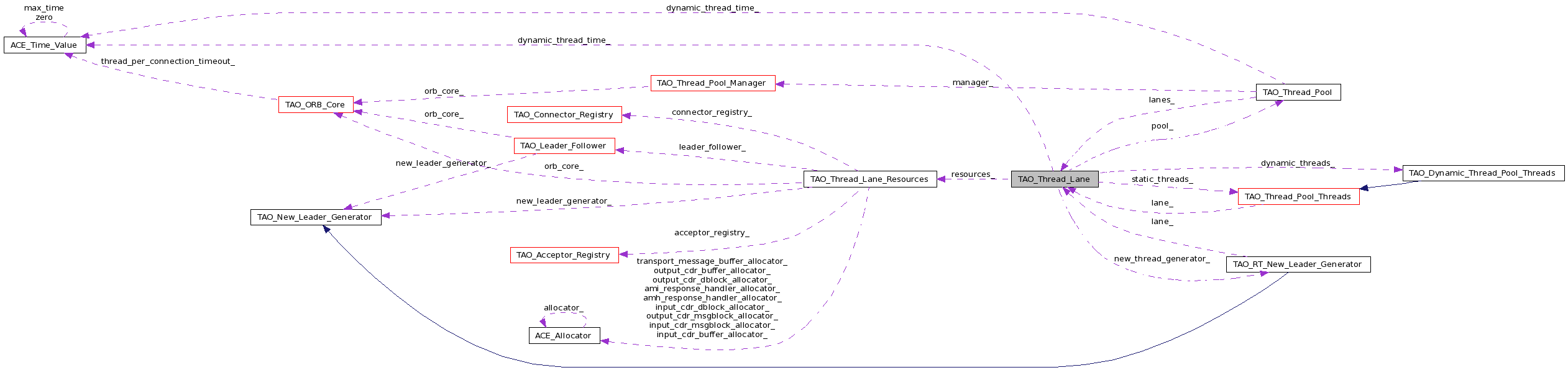
Class representing the thread lane inside a thread pool. More...
#include <Thread_Pool.h>
Public Member Functions | |
| TAO_Thread_Lane (TAO_Thread_Pool &pool, CORBA::ULong id, CORBA::Short lane_priority, CORBA::ULong static_threads, CORBA::ULong dynamic_threads, TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan lifespan, ACE_Time_Value const &dynamic_thread_time) | |
| Constructor. | |
| ~TAO_Thread_Lane (void) | |
| Destructor. | |
| void | open (void) |
| Open the lane. | |
| void | finalize (void) |
| Finalize the resources. | |
| void | shutdown_reactor (void) |
| Shutdown the reactor. | |
| void | wait (void) |
| Wait for threads to exit. | |
| int | is_collocated (const TAO_MProfile &mprofile) |
| Does mprofile belong to us? | |
| int | create_static_threads (void) |
| Create the static threads - only called once. | |
| void | shutting_down (void) |
| bool | new_dynamic_thread (void) |
Private Member Functions | |
| void | validate_and_map_priority (void) |
| Validate lane's priority and map it to a native value. | |
| int | create_threads_i (TAO_Thread_Pool_Threads &thread_pool, CORBA::ULong number_of_threads, long thread_flags) |
| int | create_dynamic_threads (CORBA::ULong number_of_threads) |
Private Attributes | |
| TAO_Thread_Pool & | pool_ |
| The Thread Pool to which this lane belongs. | |
| CORBA::ULong const | id_ |
| The id of this lane. | |
| CORBA::Short | lane_priority_ |
| bool | shutdown_ |
| CORBA::ULong const | static_threads_number_ |
| Number of static threads. | |
| CORBA::ULong const | dynamic_threads_number_ |
| Maximum number of threads we are allowed to create. | |
| TAO_Thread_Pool_Threads | static_threads_ |
| Array with all static threads. | |
| TAO_Dynamic_Thread_Pool_Threads | dynamic_threads_ |
| Array with all dynamic threads. | |
| TAO_RT_New_Leader_Generator | new_thread_generator_ |
| TAO_Thread_Lane_Resources | resources_ |
| CORBA::Short | native_priority_ |
| TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan const | lifespan_ |
| ACE_Time_Value const | dynamic_thread_time_ |
| TAO_SYNCH_MUTEX | lock_ |
| Lock to guard all members of the lane. | |
Accessors | |
|
| |
| TAO_Thread_Pool & | pool (void) const |
| CORBA::ULong | id (void) const |
| CORBA::Short | lane_priority (void) const |
| CORBA::ULong | static_threads (void) const |
| CORBA::ULong | dynamic_threads (void) const |
| CORBA::ULong | current_threads (void) const |
| CORBA::Short | native_priority (void) const |
| TAO_Thread_Lane_Resources & | resources (void) |
| TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan | lifespan (void) const |
| ACE_Time_Value const & | dynamic_thread_time (void) const |
Class representing the thread lane inside a thread pool.
Definition at line 126 of file Thread_Pool.h.
| TAO_Thread_Lane::TAO_Thread_Lane | ( | TAO_Thread_Pool & | pool, | |
| CORBA::ULong | id, | |||
| CORBA::Short | lane_priority, | |||
| CORBA::ULong | static_threads, | |||
| CORBA::ULong | dynamic_threads, | |||
| TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan | lifespan, | |||
| ACE_Time_Value const & | dynamic_thread_time | |||
| ) |
Constructor.
Definition at line 158 of file Thread_Pool.cpp.
: pool_ (pool), id_ (id), lane_priority_ (lane_priority), shutdown_ (false), static_threads_number_ (static_threads), dynamic_threads_number_ (dynamic_threads), static_threads_ (*this), dynamic_threads_ (*this), new_thread_generator_ (*this), resources_ (pool.manager ().orb_core (), &new_thread_generator_), native_priority_ (TAO_INVALID_PRIORITY), lifespan_ (lifespan), dynamic_thread_time_ (dynamic_thread_time) { }
| TAO_Thread_Lane::~TAO_Thread_Lane | ( | void | ) |
| int TAO_Thread_Lane::create_dynamic_threads | ( | CORBA::ULong | number_of_threads | ) | [private] |
Create number_of_threads of dynamic threads. Can be called multiple times.
Definition at line 418 of file Thread_Pool.cpp.
{
ACE_GUARD_RETURN (TAO_SYNCH_MUTEX,
mon,
this->lock_,
0);
return this->create_threads_i (this->dynamic_threads_,
number_of_threads,
THR_BOUND | THR_DETACHED);
}
| int TAO_Thread_Lane::create_static_threads | ( | void | ) |
Create the static threads - only called once.
Definition at line 404 of file Thread_Pool.cpp.
{
ACE_GUARD_RETURN (TAO_SYNCH_MUTEX,
mon,
this->lock_,
0);
// Create static threads.
return this->create_threads_i (this->static_threads_,
this->static_threads_number_,
THR_NEW_LWP | THR_JOINABLE);
}
| int TAO_Thread_Lane::create_threads_i | ( | TAO_Thread_Pool_Threads & | thread_pool, | |
| CORBA::ULong | number_of_threads, | |||
| long | thread_flags | |||
| ) | [private] |
Definition at line 431 of file Thread_Pool.cpp.
{
// Overwritten parameters.
int force_active = 1;
// Default parameters.
int default_grp_id = -1;
ACE_Task_Base *default_task = 0;
ACE_hthread_t *default_thread_handles = 0;
void **default_stack = 0;
// Setting stack size.
size_t *stack_size_array = 0;
ACE_NEW_RETURN (stack_size_array,
size_t[number_of_threads],
-1);
size_t index;
for (index = 0;
index != number_of_threads;
++index)
stack_size_array[index] =
this->pool ().stack_size ();
// Make sure the dynamically created stack size array is properly
// deleted.
ACE_Auto_Basic_Array_Ptr<size_t> auto_stack_size_array (stack_size_array);
TAO_ORB_Core &orb_core =
this->pool ().manager ().orb_core ();
long flags =
thread_flags |
orb_core.orb_params ()->thread_creation_flags ();
// Activate the threads.
int result =
thread_pool.activate (flags,
number_of_threads,
force_active,
this->native_priority_,
default_grp_id,
default_task,
default_thread_handles,
default_stack,
stack_size_array);
if (result != 0)
return result;
return result;
}
| CORBA::ULong TAO_Thread_Lane::current_threads | ( | void | ) | const |
Definition at line 391 of file Thread_Pool.cpp.
{
ACE_GUARD_RETURN (TAO_SYNCH_MUTEX,
mon,
this->lock_,
0);
return (this->static_threads_.thr_count () +
this->dynamic_threads_.thr_count ());
}
| ACE_Time_Value const & TAO_Thread_Lane::dynamic_thread_time | ( | void | ) | const |
Definition at line 72 of file Thread_Pool.inl.
{
return this->dynamic_thread_time_;
}
| CORBA::ULong TAO_Thread_Lane::dynamic_threads | ( | void | ) | const |
Definition at line 51 of file Thread_Pool.inl.
{
return this->dynamic_threads_number_;
}
| void TAO_Thread_Lane::finalize | ( | void | ) |
Finalize the resources.
Definition at line 365 of file Thread_Pool.cpp.
{
// Finalize resources.
this->resources_.finalize ();
}
| CORBA::ULong TAO_Thread_Lane::id | ( | void | ) | const |
Definition at line 16 of file Thread_Pool.inl.
{
return this->id_;
}
| int TAO_Thread_Lane::is_collocated | ( | const TAO_MProfile & | mprofile | ) |
Does mprofile belong to us?
Definition at line 385 of file Thread_Pool.cpp.
{
return this->resources_.is_collocated (mprofile);
}
| CORBA::Short TAO_Thread_Lane::lane_priority | ( | void | ) | const |
Definition at line 30 of file Thread_Pool.inl.
{
return this->lane_priority_;
}
| TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan TAO_Thread_Lane::lifespan | ( | void | ) | const |
Definition at line 65 of file Thread_Pool.inl.
{
return this->lifespan_;
}
| CORBA::Short TAO_Thread_Lane::native_priority | ( | void | ) | const |
Definition at line 37 of file Thread_Pool.inl.
{
return this->native_priority_;
}
| bool TAO_Thread_Lane::new_dynamic_thread | ( | void | ) |
Called by the TAO_RT_New_Leader_Generator to request a new dynamic thread. It can be that no thread can be created because the number of threads is equal to the maximum we can have or the Thread Lane is shutting down.
| true | A new thread is created | |
| false | No thread could be created |
Definition at line 183 of file Thread_Pool.cpp.
{
// Note that we are checking this condition below without the lock
// held.
if (this->dynamic_threads_.thr_count () >= this->dynamic_threads_number_)
return false;
ACE_GUARD_RETURN (TAO_SYNCH_MUTEX,
mon,
this->lock_,
false);
TAO_Thread_Pool_Manager &manager = this->pool_.manager ();
if (!manager.orb_core ().has_shutdown () && !this->shutdown_&&
this->dynamic_threads_.thr_count () < this->dynamic_threads_number_)
{
if (TAO_debug_level > 0)
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("TAO Process %P Pool %d Lane %d Thread %t\n")
ACE_TEXT ("Current number of dynamic threads = %d; ")
ACE_TEXT ("static threads = %d; max dynamic threads = %d\n")
ACE_TEXT ("No leaders available; creating new leader!\n"),
this->pool_.id (),
this->id_,
this->dynamic_threads_.thr_count (),
this->static_threads_number_,
this->dynamic_threads_number_));
int result =
this->create_threads_i (this->dynamic_threads_,
1,
THR_BOUND | THR_DETACHED);
if (result != 0)
ACE_ERROR_RETURN ((LM_ERROR,
ACE_TEXT ("Pool %d Lane %d Thread %t: ")
ACE_TEXT ("cannot create dynamic thread\n"),
this->pool_.id (),
this->id_),
false);
}
return true;
}
| void TAO_Thread_Lane::open | ( | void | ) |
Open the lane.
Definition at line 288 of file Thread_Pool.cpp.
{
// Validate and map priority.
this->validate_and_map_priority ();
char pool_lane_id[10];
TAO_ORB_Parameters *params =
this->pool ().manager ().orb_core ().orb_params ();
TAO_EndpointSet endpoint_set;
// Create a string just *:* which means all pools all thread id's
ACE_OS::sprintf (pool_lane_id,
"*:*");
// Get the endpoints for all
params->get_endpoint_set (pool_lane_id, endpoint_set);
// Create a string with pool:* which means all lanes for this pool
ACE_OS::sprintf (pool_lane_id,
"%d:*",
this->pool ().id ());
// Get the endpoints for this pool.
params->get_endpoint_set (pool_lane_id, endpoint_set);
// Create a string with *:lane which means a lan of all pools
ACE_OS::sprintf (pool_lane_id,
"*:%d",
this->id ());
// Get the endpoints for this lane.
params->get_endpoint_set (pool_lane_id, endpoint_set);
// Create a string with the pool:thread id.
ACE_OS::sprintf (pool_lane_id,
"%d:%d",
this->pool ().id (),
this->id ());
// Get the endpoints for this lane.
params->get_endpoint_set (pool_lane_id, endpoint_set);
bool ignore_address = false;
if (endpoint_set.is_empty ())
{
// If endpoints are not specified for this lane, use the
// endpoints specified for the default lane but ignore their
// addresses.
params->get_endpoint_set (TAO_DEFAULT_LANE, endpoint_set);
ignore_address = true;
}
else
{
// If endpoints are specified for this lane, use them with their
// addresses.
ignore_address = false;
}
// Open the acceptor registry.
int const result =
this->resources_.open_acceptor_registry (endpoint_set, ignore_address);
if (result == -1)
throw ::CORBA::INTERNAL (
CORBA::SystemException::_tao_minor_code (
TAO_ACCEPTOR_REGISTRY_OPEN_LOCATION_CODE,
0),
CORBA::COMPLETED_NO);
}
| TAO_Thread_Pool & TAO_Thread_Lane::pool | ( | void | ) | const |
Definition at line 23 of file Thread_Pool.inl.
{
return this->pool_;
}
| TAO_Thread_Lane_Resources & TAO_Thread_Lane::resources | ( | void | ) |
Definition at line 58 of file Thread_Pool.inl.
{
return this->resources_;
}
| void TAO_Thread_Lane::shutdown_reactor | ( | void | ) |
Shutdown the reactor.
Definition at line 372 of file Thread_Pool.cpp.
{
this->resources_.shutdown_reactor ();
}
| void TAO_Thread_Lane::shutting_down | ( | void | ) |
Mark that this lane is shutting down, we then don't create any dynamic threads anymore. When the pool is shutting down the leader follower loop is called which can cause a request to create a new dynamic thread but we shouldn't create a new one.
Definition at line 230 of file Thread_Pool.cpp.
{
ACE_GUARD (TAO_SYNCH_MUTEX,
mon,
this->lock_);
// We are shutting down, this way we are not creating any more new dynamic
// threads
this->shutdown_ = true;
}
| CORBA::ULong TAO_Thread_Lane::static_threads | ( | void | ) | const |
Definition at line 44 of file Thread_Pool.inl.
{
return this->static_threads_number_;
}
| void TAO_Thread_Lane::validate_and_map_priority | ( | void | ) | [private] |
Validate lane's priority and map it to a native value.
Definition at line 242 of file Thread_Pool.cpp.
{
// Make sure that static_threads_number_ is not zero.
if (this->static_threads_number_ == 0)
throw ::CORBA::BAD_PARAM ();
// Check that the priority is in bounds.
if (this->lane_priority_ < RTCORBA::minPriority
// The line below will always be false unless the value of
// RTCORBA::maxPriority, which is now assigned the value of
// 32767, is changed in RTCORBA.pidl.
// || this->lane_priority_ > RTCORBA::maxPriority
)
{
throw ::CORBA::BAD_PARAM ();
}
CORBA::ORB_ptr orb = this->pool_.manager ().orb_core ().orb ();
// Get the priority mapping manager.
CORBA::Object_var obj =
orb->resolve_initial_references (TAO_OBJID_PRIORITYMAPPINGMANAGER);
TAO_Priority_Mapping_Manager_var mapping_manager =
TAO_Priority_Mapping_Manager::_narrow (obj.in ());
RTCORBA::PriorityMapping *pm = mapping_manager.in ()->mapping ();
// Map CORBA priority to native priority.
CORBA::Boolean const result =
pm->to_native (this->lane_priority_, this->native_priority_);
if (!result)
throw ::CORBA::DATA_CONVERSION (CORBA::OMGVMCID | 2, CORBA::COMPLETED_NO);
if (TAO_debug_level > 3)
{
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("TAO (%P|%t) - creating thread at ")
ACE_TEXT ("(corba:native) priority %d:%d\n"),
this->lane_priority_,
this->native_priority_));
}
}
| void TAO_Thread_Lane::wait | ( | void | ) |
Wait for threads to exit.
Definition at line 378 of file Thread_Pool.cpp.
{
this->static_threads_.wait ();
this->dynamic_threads_.wait ();
}
ACE_Time_Value const TAO_Thread_Lane::dynamic_thread_time_ [private] |
Definition at line 241 of file Thread_Pool.h.
Array with all dynamic threads.
Definition at line 231 of file Thread_Pool.h.
CORBA::ULong const TAO_Thread_Lane::dynamic_threads_number_ [private] |
Maximum number of threads we are allowed to create.
Definition at line 225 of file Thread_Pool.h.
CORBA::ULong const TAO_Thread_Lane::id_ [private] |
The id of this lane.
Definition at line 213 of file Thread_Pool.h.
CORBA::Short TAO_Thread_Lane::lane_priority_ [private] |
Definition at line 215 of file Thread_Pool.h.
Definition at line 239 of file Thread_Pool.h.
TAO_SYNCH_MUTEX TAO_Thread_Lane::lock_ [mutable, private] |
Lock to guard all members of the lane.
Definition at line 244 of file Thread_Pool.h.
Definition at line 237 of file Thread_Pool.h.
Definition at line 233 of file Thread_Pool.h.
TAO_Thread_Pool& TAO_Thread_Lane::pool_ [private] |
The Thread Pool to which this lane belongs.
Definition at line 210 of file Thread_Pool.h.
Definition at line 235 of file Thread_Pool.h.
bool TAO_Thread_Lane::shutdown_ [private] |
This boolean is set when we are shutting down, then we will not create any new dynamic threads
Definition at line 219 of file Thread_Pool.h.
Array with all static threads.
Definition at line 228 of file Thread_Pool.h.
CORBA::ULong const TAO_Thread_Lane::static_threads_number_ [private] |
Number of static threads.
Definition at line 222 of file Thread_Pool.h.
 1.7.0
1.7.0

