#include <LocateRequest_Invocation.h>
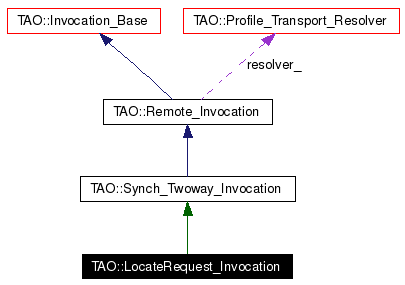
Inheritance diagram for TAO::LocateRequest_Invocation:
Public Member Functions | |
| LocateRequest_Invocation (CORBA::Object_ptr otarget, Profile_Transport_Resolver &resolver, TAO_Operation_Details &detail) | |
| Invocation_Status | invoke (ACE_Time_Value *max_wait_time) throw (CORBA::Exception) |
| Start the invocation. | |
Private Member Functions | |
| Invocation_Status | check_reply (TAO_Synch_Reply_Dispatcher &rd) |
| Helper to check the reply status. | |
Definition at line 46 of file LocateRequest_Invocation.h.
|
||||||||||||||||
|
Definition at line 22 of file LocateRequest_Invocation.cpp. References CORBA::Object_ptr.
00027 : Synch_Twoway_Invocation (otarget, 00028 resolver, 00029 detail) 00030 { 00031 } |
|
|
Helper to check the reply status.
Definition at line 119 of file LocateRequest_Invocation.cpp. References ACE_CHECK_RETURN, ACE_ENV_ARG_PARAMETER, ACE_THROW_RETURN, TAO_Transport::assign_translators(), TAO::String_var< charT >::inout(), TAO::Synch_Twoway_Invocation::location_forward(), TAO::Profile_Transport_Resolver::profile(), ACE_InputCDR::read_short(), CORBA::String_var, TAO_GIOP_LOC_NEEDS_ADDRESSING_MODE, TAO_GIOP_LOC_SYSTEM_EXCEPTION, TAO_GIOP_OBJECT_FORWARD, TAO_GIOP_OBJECT_FORWARD_PERM, TAO_GIOP_OBJECT_HERE, TAO_GIOP_UNKNOWN_OBJECT, TAO::TAO_INVOKE_FAILURE, TAO::TAO_INVOKE_RESTART, TAO::TAO_INVOKE_SUCCESS, TAO::TAO_INVOKE_SYSTEM_EXCEPTION, and TAO::Profile_Transport_Resolver::transport().
00121 {
00122 TAO_InputCDR &cdr =
00123 rd.reply_cdr ();
00124
00125 // Set the translators
00126 this->resolver_.transport ()->assign_translators (&cdr, 0);
00127
00128 switch (rd.reply_status ())
00129 {
00130 case TAO_GIOP_OBJECT_HERE:
00131 break;
00132 case TAO_GIOP_UNKNOWN_OBJECT:
00133 ACE_THROW_RETURN (CORBA::OBJECT_NOT_EXIST (TAO::VMCID,
00134 CORBA::COMPLETED_YES),
00135 TAO_INVOKE_FAILURE);
00136 case TAO_GIOP_OBJECT_FORWARD:
00137 case TAO_GIOP_OBJECT_FORWARD_PERM:
00138 return this->location_forward (cdr
00139 ACE_ENV_ARG_PARAMETER);
00140
00141 case TAO_GIOP_LOC_SYSTEM_EXCEPTION:
00142 {
00143 // Pull the exception from the stream.
00144 CORBA::String_var buf;
00145
00146 if ((cdr >> buf.inout ()) == 0)
00147 {
00148 // Could not demarshal the exception id, raise a local
00149 // CORBA::MARSHAL exception.
00150 ACE_THROW_RETURN (CORBA::MARSHAL (TAO::VMCID,
00151 CORBA::COMPLETED_MAYBE),
00152 TAO_INVOKE_SYSTEM_EXCEPTION);
00153 }
00154
00155 // This kind of exception shouldn't happen with locate requests,
00156 // but if it does, we turn it into a CORBA::UNKNOWN exception.
00157 ACE_THROW_RETURN (CORBA::UNKNOWN (TAO::VMCID,
00158 CORBA::COMPLETED_YES),
00159 TAO_INVOKE_SYSTEM_EXCEPTION);
00160 }
00161 case TAO_GIOP_LOC_NEEDS_ADDRESSING_MODE:
00162 {
00163 // We have received an exception with a request to change the
00164 // addressing mode. First let us read the mode that the
00165 // server/agent asks for.
00166 CORBA::Short addr_mode = 0;
00167
00168 if (cdr.read_short (addr_mode) == 0)
00169 {
00170 // Could not demarshal the addressing disposition, raise a local
00171 // CORBA::MARSHAL exception.
00172 ACE_THROW_RETURN (CORBA::MARSHAL (TAO::VMCID,
00173 CORBA::COMPLETED_MAYBE),
00174 TAO_INVOKE_SUCCESS);
00175 }
00176
00177 // Now set this addressing mode in the profile, so that
00178 // the next invocation need not go through this.
00179 this->resolver_.profile ()->addressing_mode (addr_mode
00180 ACE_ENV_ARG_PARAMETER);
00181 ACE_CHECK_RETURN (TAO_INVOKE_SUCCESS);
00182
00183 // Restart the invocation.
00184 return TAO_INVOKE_RESTART;
00185 }
00186 }
00187
00188 return TAO_INVOKE_SUCCESS;
00189 }
|
|
|
Start the invocation.
Definition at line 34 of file LocateRequest_Invocation.cpp. References ACE_CHECK_RETURN, ACE_ENV_ARG_PARAMETER, ACE_THROW_RETURN, TAO_Transport::generate_locate_request(), TAO::Invocation_Status, TAO_Transport::out_stream(), TAO_Bind_Dispatcher_Guard::status(), TAO::TAO_INVOKE_FAILURE, TAO::TAO_INVOKE_SUCCESS, and ACE_Countdown_Time::update(). Referenced by TAO::LocateRequest_Invocation_Adapter::invoke().
00037 {
00038 ACE_Countdown_Time countdown (max_wait_time);
00039
00040 TAO_Synch_Reply_Dispatcher rd (this->resolver_.stub ()->orb_core (),
00041 this->details_.reply_service_info ());
00042
00043 // Register a reply dispatcher for this invocation. Use the
00044 // preallocated reply dispatcher.
00045 TAO_Bind_Dispatcher_Guard dispatch_guard (this->details_.request_id (),
00046 &rd,
00047 this->resolver_.transport ()->tms ());
00048
00049 if (dispatch_guard.status () != 0)
00050 {
00051 // @@ What is the right way to handle this error? Do we need
00052 // to call the interceptors in this case?
00053 this->resolver_.transport ()->close_connection ();
00054
00055 ACE_THROW_RETURN (CORBA::INTERNAL (TAO::VMCID,
00056 CORBA::COMPLETED_NO),
00057 TAO_INVOKE_FAILURE);
00058 }
00059
00060 TAO_Target_Specification tspec;
00061 this->init_target_spec (tspec ACE_ENV_ARG_PARAMETER);
00062 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00063
00064 TAO_Transport *transport =
00065 this->resolver_.transport ();
00066
00067 TAO_OutputCDR &cdr = transport->out_stream ();
00068
00069 int const retval =
00070 transport->generate_locate_request (tspec,
00071 this->details_,
00072 cdr);
00073 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00074
00075 if (retval == -1)
00076 return TAO_INVOKE_FAILURE;
00077
00078 countdown.update ();
00079
00080 Invocation_Status s =
00081 this->send_message (cdr,
00082 TAO_Transport::TAO_TWOWAY_REQUEST,
00083 max_wait_time
00084 ACE_ENV_ARG_PARAMETER);
00085 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00086
00087 if (s != TAO_INVOKE_SUCCESS)
00088 return s;
00089
00090 countdown.update ();
00091
00092 // For some strategies one may want to release the transport
00093 // back to cache. If the idling is successfull let the
00094 // resolver about that.
00095 if (this->resolver_.transport ()->idle_after_send ())
00096 this->resolver_.transport_released ();
00097
00098 s =
00099 this->wait_for_reply (max_wait_time,
00100 rd,
00101 dispatch_guard
00102 ACE_ENV_ARG_PARAMETER);
00103 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00104
00105 s = this->check_reply (rd
00106 ACE_ENV_ARG_PARAMETER);
00107 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00108
00109 // For some strategies one may want to release the transport
00110 // back to cache after receiving the reply. If the idling is
00111 // successfull let the resolver about that.
00112 if (this->resolver_.transport ()->idle_after_reply ())
00113 this->resolver_.transport_released ();
00114
00115 return s;
00116 }
|
 1.3.6
1.3.6