#include <Remote_Invocation.h>
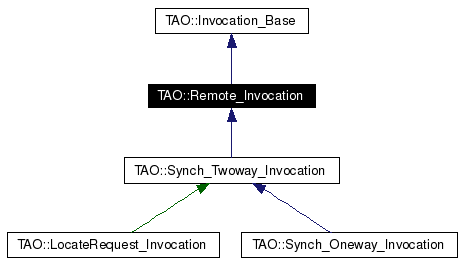
Inheritance diagram for TAO::Remote_Invocation:
Public Member Functions | |
| Remote_Invocation (CORBA::Object_ptr otarget, Profile_Transport_Resolver &resolver, TAO_Operation_Details &detail, bool response_expected) | |
Protected Member Functions | |
| void | init_target_spec (TAO_Target_Specification &spec) |
| Initialize the spec. | |
| void | write_header (TAO_Target_Specification &spec, TAO_OutputCDR &out_stream) |
| Write the GIOP header into the stream. | |
| void | marshal_data (TAO_OutputCDR &cdr) |
| Marshal the arguments into the stream. | |
| Invocation_Status | send_message (TAO_OutputCDR &cdr, short message_semantics, ACE_Time_Value *max_wait_time) |
| Write the message onto the socket. | |
Protected Attributes | |
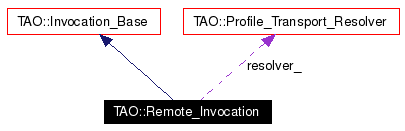
| Profile_Transport_Resolver & | resolver_ |
| Our resolver. | |
This class encapulates some of the common functionalities used by synchronous, asynchronous, DII and DSI invocations.
Definition at line 51 of file Remote_Invocation.h.
|
||||||||||||||||||||
|
Definition at line 22 of file Remote_Invocation.cpp. References CORBA::Object_ptr.
00027 : Invocation_Base (otarget, 00028 resolver.object (), 00029 resolver.stub (), 00030 detail, 00031 response_expected, 00032 true /* request_is_remote */ ) 00033 , resolver_ (resolver) 00034 { 00035 } |
|
|
Initialize the spec.
Mega hack for RTCORBA start. I don't think that PortableInterceptor would work here esp. for RTCORBA. PI needs to be improved to help our cause. Mega hack for RTCORBA END Definition at line 38 of file Remote_Invocation.cpp. References ACE_CHECK, ACE_ENV_ARG_PARAMETER, ACE_ERROR, ACE_TEXT, TAO_Profile::addressing_mode(), TAO_Stub::create_ior_info(), TAO_Profile::create_tagged_profile(), LM_ERROR, TAO_Profile::object_key(), TAO_Stub::orb_core(), TAO::Profile_Transport_Resolver::profile(), TAO_Operation_Details::request_service_context(), resolver_, TAO_ORB_Core::service_context_list(), TAO::Profile_Transport_Resolver::stub(), and TAO_debug_level.
00040 {
00041 /**
00042 * Mega hack for RTCORBA start. I don't think that
00043 * PortableInterceptor would work here esp. for RTCORBA. PI needs
00044 * to be improved to help our cause.
00045 */
00046 this->resolver_.stub ()->orb_core ()->service_context_list (
00047 this->resolver_.stub (),
00048 this->details_.request_service_context (),
00049 0
00050 ACE_ENV_ARG_PARAMETER);
00051 ACE_CHECK;
00052 /**
00053 * Mega hack for RTCORBA END
00054 */
00055
00056 TAO_Profile *pfile = this->resolver_.profile ();
00057
00058 // Set the target specification mode
00059 switch (pfile->addressing_mode ())
00060 {
00061 case TAO_Target_Specification::Key_Addr:
00062 target_spec.target_specifier (pfile->object_key ());
00063 break;
00064 case TAO_Target_Specification::Profile_Addr:
00065 {
00066 IOP::TaggedProfile *tp =
00067 pfile->create_tagged_profile ();
00068
00069 if (tp)
00070 {
00071 target_spec.target_specifier (*tp);
00072 }
00073 }
00074 break;
00075
00076 case TAO_Target_Specification::Reference_Addr:
00077 // We need to call the method seperately. If there is no
00078 // IOP::IOR info, the call would create the info and return the
00079 // index that we need.
00080 CORBA::ULong index = 0;
00081 IOP::IOR *ior_info = 0;
00082 int const retval =
00083 this->resolver_.stub ()->create_ior_info (ior_info,
00084 index
00085 ACE_ENV_ARG_PARAMETER);
00086 ACE_CHECK;
00087
00088 if (retval == -1)
00089 {
00090 if (TAO_debug_level > 0)
00091 {
00092 ACE_ERROR ((LM_ERROR,
00093 ACE_TEXT ("TAO (%P|%t) - ")
00094 ACE_TEXT ("Remote_Invocation::init_target_spec, ")
00095 ACE_TEXT ("Error in finding index for ")
00096 ACE_TEXT ("IOP::IOR \n")));
00097 }
00098
00099 return;
00100 }
00101
00102 target_spec.target_specifier (*ior_info,
00103 index);
00104 break;
00105 }
00106
00107
00108 }
|
|
|
Marshal the arguments into the stream.
Definition at line 132 of file Remote_Invocation.cpp. References ACE_THROW, and TAO_Operation_Details::marshal_args().
00134 {
00135 if (this->details_.marshal_args (out_stream) == false)
00136 {
00137 ACE_THROW (CORBA::MARSHAL ());
00138 }
00139
00140 return;
00141 }
|
|
||||||||||||||||
|
Write the message onto the socket.
Definition at line 144 of file Remote_Invocation.cpp. References ACE_CHECK_RETURN, ACE_DEBUG, ACE_ENV_ARG_PARAMETER, ACE_TEXT, ACE_THROW_RETURN, TAO_Transport::close_connection(), TAO_Transport::connection_handler(), ETIME, TAO_ORB_Core::get_protocols_hooks(), LM_DEBUG, TAO_Stub::orb_core(), TAO_Stub::reset_profiles(), resolver_, TAO_Transport::send_request(), TAO_Protocols_Hooks::set_client_network_priority(), TAO_Connection_Handler::set_dscp_codepoint(), TAO_Stub::set_valid_profile(), TAO::Profile_Transport_Resolver::stub(), TAO_debug_level, TAO::TAO_INVOKE_FAILURE, TAO::TAO_INVOKE_RESTART, TAO::TAO_INVOKE_SUCCESS, TAO_TIMEOUT_SEND_MINOR_CODE, and TAO::Profile_Transport_Resolver::transport().
00148 {
00149 TAO_Protocols_Hooks *tph =
00150 this->resolver_.stub ()->orb_core ()->get_protocols_hooks ();
00151
00152 CORBA::Boolean set_client_network_priority =
00153 tph->set_client_network_priority (this->resolver_.transport ()->tag (),
00154 this->resolver_.stub ()
00155 ACE_ENV_ARG_PARAMETER);
00156 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00157
00158 TAO_Connection_Handler *connection_handler =
00159 this->resolver_.transport ()->connection_handler ();
00160
00161 connection_handler->set_dscp_codepoint (set_client_network_priority);
00162
00163 int const retval =
00164 this->resolver_.transport ()->send_request (
00165 this->resolver_.stub (),
00166 this->resolver_.stub ()->orb_core (),
00167 cdr,
00168 message_semantics,
00169 max_wait_time);
00170
00171 if (retval == -1)
00172 {
00173 if (errno == ETIME)
00174 {
00175 // We sent a message already and we haven't gotten a
00176 // reply. Just throw TIMEOUT with *COMPLETED_MAYBE*.
00177 ACE_THROW_RETURN (
00178 CORBA::TIMEOUT (
00179 CORBA::SystemException::_tao_minor_code (
00180 TAO_TIMEOUT_SEND_MINOR_CODE,
00181 errno
00182 ),
00183 CORBA::COMPLETED_MAYBE
00184 ),
00185 TAO_INVOKE_FAILURE
00186 );
00187 }
00188
00189 if (TAO_debug_level > 2)
00190 {
00191 ACE_DEBUG ((LM_DEBUG,
00192 ACE_TEXT ("TAO (%P|%t) - ")
00193 ACE_TEXT ("Remote_Invocation::send_message, ")
00194 ACE_TEXT ("failure while sending message \n")));
00195 }
00196
00197 // Close the transport and all the associated stuff along with
00198 // it.
00199 this->resolver_.transport ()->close_connection ();
00200 this->resolver_.stub ()->reset_profiles ();
00201 return TAO_INVOKE_RESTART;
00202 }
00203
00204 this->resolver_.stub ()->set_valid_profile ();
00205 return TAO_INVOKE_SUCCESS;
00206 }
|
|
||||||||||||
|
Write the GIOP header into the stream.
Definition at line 111 of file Remote_Invocation.cpp. References ACE_THROW, TAO_Transport::assign_translators(), TAO_Transport::clear_translators(), TAO_Transport::generate_request_header(), resolver_, and TAO::Profile_Transport_Resolver::transport().
00114 {
00115 this->resolver_.transport ()->clear_translators (0,
00116 &out_stream);
00117
00118 // Send the request for the header
00119 if (this->resolver_.transport ()->generate_request_header (this->details_,
00120 spec,
00121 out_stream)
00122 == -1)
00123 {
00124 ACE_THROW (CORBA::MARSHAL ());
00125 }
00126
00127 this->resolver_.transport ()->assign_translators (0,
00128 &out_stream);
00129 }
|
|
|
Our resolver.
Definition at line 94 of file Remote_Invocation.h. Referenced by init_target_spec(), send_message(), and write_header(). |
 1.3.6
1.3.6