#include <EC_MT_Dispatching.h>
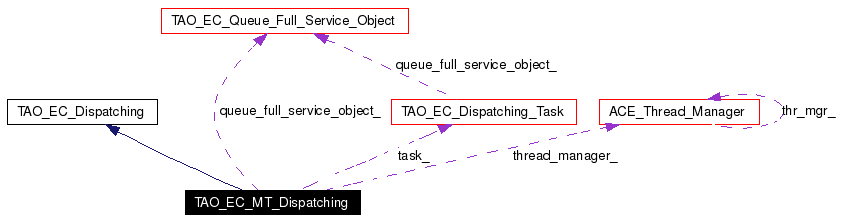
Inheritance diagram for TAO_EC_MT_Dispatching:
Public Member Functions | |
| TAO_EC_MT_Dispatching (int nthreads, int thread_creation_flags, int thread_priority, int force_activate, TAO_EC_Queue_Full_Service_Object *queue_full_service_object_name) | |
| virtual void | activate (void) |
| virtual void | shutdown (void) |
| virtual void | push (TAO_EC_ProxyPushSupplier *proxy, RtecEventComm::PushConsumer_ptr consumer, const RtecEventComm::EventSet &event, TAO_EC_QOS_Info &qos_info) |
| virtual void | push_nocopy (TAO_EC_ProxyPushSupplier *proxy, RtecEventComm::PushConsumer_ptr consumer, RtecEventComm::EventSet &event, TAO_EC_QOS_Info &qos_info) |
Private Attributes | |
| ACE_Thread_Manager | thread_manager_ |
| Use our own thread manager. | |
| int | nthreads_ |
| The number of active tasks. | |
| int | thread_creation_flags_ |
| int | thread_priority_ |
| The priority of the dispatching threads. | |
| int | force_activate_ |
| TAO_EC_Dispatching_Task | task_ |
| The dispatching task. | |
| TAO_SYNCH_MUTEX | lock_ |
| Synchronize access to internal data. | |
| int | active_ |
| Are the threads running? | |
| TAO_EC_Queue_Full_Service_Object * | queue_full_service_object_ |
| Service Object information. | |
This strategy uses a single queue, serviced by one or more threads. It's main purpose is to decouple the suppliers from the client execution time, specially in the collocated case.
Definition at line 39 of file EC_MT_Dispatching.h.
|
||||||||||||||||||||||||
|
Constructor It will create nthreads servicing threads... Definition at line 10 of file EC_MT_Dispatching.cpp. References ACE_Task_Base::open().
00015 : nthreads_ (nthreads), 00016 thread_creation_flags_ (thread_creation_flags), 00017 thread_priority_ (thread_priority), 00018 force_activate_ (force_activate), 00019 task_(0, service_object), 00020 active_ (0), 00021 queue_full_service_object_ (service_object) 00022 { 00023 this->task_.open (&this->thread_manager_); 00024 } |
|
|
Initialize all the data structures, activate any internal threads, etc. Implements TAO_EC_Dispatching. Definition at line 27 of file EC_MT_Dispatching.cpp. References ACE_DEBUG, ACE_ERROR, ACE_GUARD, ACE_Task_Base::activate(), force_activate_, LM_DEBUG, LM_ERROR, and TAO_SYNCH_MUTEX. Referenced by push_nocopy().
00028 {
00029 ACE_GUARD (TAO_SYNCH_MUTEX, ace_mon, this->lock_);
00030
00031 if (this->active_ != 0)
00032 return;
00033
00034 this->active_ = 1;
00035
00036 if (this->task_.activate (this->thread_creation_flags_,
00037 this->nthreads_,
00038 1,
00039 this->thread_priority_) == -1)
00040 {
00041 if (this->force_activate_ != 0)
00042 {
00043 ACE_DEBUG ((LM_DEBUG,
00044 "EC (%P|%t) activating dispatching queue at"
00045 " default priority\n"));
00046 if (this->task_.activate (THR_BOUND, this->nthreads_) == -1)
00047 ACE_ERROR ((LM_ERROR,
00048 "EC (%P|%t) cannot activate dispatching queue.\n"));
00049 }
00050 }
00051 }
|
|
||||||||||||||||||||
|
The consumer represented by proxy should receive event. It can use the information in qos_info to determine the event priority (among other things). Implements TAO_EC_Dispatching. Definition at line 69 of file EC_MT_Dispatching.cpp. References RtecEventComm::EventSet, and push_nocopy().
00073 {
00074 RtecEventComm::EventSet event_copy = event;
00075 this->push_nocopy (proxy, consumer, event_copy, qos_info);
00076 }
|
|
||||||||||||||||||||
|
Implements TAO_EC_Dispatching. Definition at line 79 of file EC_MT_Dispatching.cpp. References activate(), RtecEventComm::EventSet, and TAO_EC_Dispatching_Task::push(). Referenced by push().
|
|
|
Deactivate any internal threads and cleanup internal data structures, it should only return once the threads have finished their jobs. Implements TAO_EC_Dispatching. Definition at line 54 of file EC_MT_Dispatching.cpp. References ACE_GUARD, nthreads_, ACE_Task< ACE_SYNCH >::putq(), TAO_SYNCH_MUTEX, thread_manager_, and ACE_Thread_Manager::wait().
00055 {
00056 ACE_GUARD (TAO_SYNCH_MUTEX, ace_mon, this->lock_);
00057
00058 if (this->active_ == 0)
00059 return;
00060
00061 for (int i = 0; i < this->nthreads_; ++i)
00062 {
00063 this->task_.putq (new TAO_EC_Shutdown_Task_Command);
00064 }
00065 this->thread_manager_.wait ();
00066 }
|
|
|
Are the threads running?
Definition at line 87 of file EC_MT_Dispatching.h. |
|
|
If activation at the requested priority fails then we fallback on the defaults for thread activation. Definition at line 78 of file EC_MT_Dispatching.h. Referenced by activate(). |
|
|
Synchronize access to internal data.
Definition at line 84 of file EC_MT_Dispatching.h. |
|
|
The number of active tasks.
Definition at line 67 of file EC_MT_Dispatching.h. Referenced by shutdown(). |
|
|
Service Object information.
Definition at line 90 of file EC_MT_Dispatching.h. |
|
|
The dispatching task.
Definition at line 81 of file EC_MT_Dispatching.h. |
|
|
The flags (THR_BOUND, THR_NEW_LWP, etc.) used to create the dispatching threads. Definition at line 71 of file EC_MT_Dispatching.h. |
|
|
Use our own thread manager.
Definition at line 64 of file EC_MT_Dispatching.h. Referenced by shutdown(). |
|
|
The priority of the dispatching threads.
Definition at line 74 of file EC_MT_Dispatching.h. |
 1.3.6
1.3.6