#include <Synch_Invocation.h>
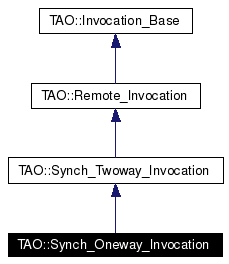
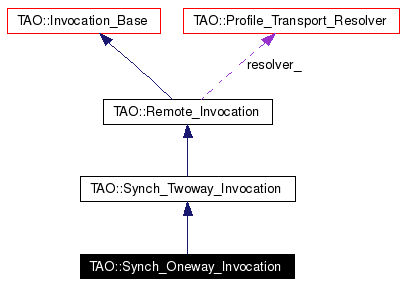
Inheritance diagram for TAO::Synch_Oneway_Invocation:
Public Member Functions | |
| Synch_Oneway_Invocation (CORBA::Object_ptr otarget, Profile_Transport_Resolver &resolver, TAO_Operation_Details &detail) | |
| Constructor used by TAO::Invocation_Adapter. | |
| Invocation_Status | remote_oneway (ACE_Time_Value *max_wait_time) throw (CORBA::Exception) |
This class inherits from twoway invocation for the following reasons
Definition at line 150 of file Synch_Invocation.h.
|
||||||||||||||||
|
Constructor used by TAO::Invocation_Adapter.
Definition at line 694 of file Synch_Invocation.cpp. References CORBA::Object_ptr.
00698 : Synch_Twoway_Invocation (otarget, r, d, false) 00699 { 00700 } |
|
|
Method used by the adapter to kickstart an oneway invocation to the remote object. Definition at line 703 of file Synch_Invocation.cpp. References ACE_ANY_EXCEPTION, ACE_CATCHALL, ACE_CATCHANY, ACE_CHECK_RETURN, ACE_DEBUG, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_ENV_SINGLE_ARG_PARAMETER, ACE_RE_THROW, ACE_TRY, ACE_TRY_CHECK, TAO_Transport::format_queue_message(), TAO::Invocation_Status, TAO_Transport::is_connected(), LM_DEBUG, TAO_OutputCDR::message_attributes(), CORBA::Octet, TAO_Transport::out_stream(), PortableInterceptor::ReplyStatus, TAO_debug_level, TAO::TAO_INVOKE_FAILURE, TAO::TAO_INVOKE_RESTART, TAO::TAO_INVOKE_SUCCESS, and ACE_Countdown_Time::update(). Referenced by TAO::Invocation_Adapter::invoke_oneway().
00706 {
00707 ACE_Countdown_Time countdown (max_wait_time);
00708
00709 const CORBA::Octet response_flags =
00710 this->details_.response_flags ();
00711
00712 Invocation_Status s = TAO_INVOKE_FAILURE;
00713
00714 if (response_flags == CORBA::Octet (Messaging::SYNC_WITH_SERVER) ||
00715 response_flags == CORBA::Octet (Messaging::SYNC_WITH_TARGET))
00716 {
00717 s = Synch_Twoway_Invocation::remote_twoway (max_wait_time
00718 ACE_ENV_ARG_PARAMETER);
00719 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00720
00721 return s;
00722 }
00723
00724 TAO_Target_Specification tspec;
00725 this->init_target_spec (tspec ACE_ENV_ARG_PARAMETER);
00726 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00727
00728 #if TAO_HAS_INTERCEPTORS == 1
00729 s = this->send_request_interception (ACE_ENV_SINGLE_ARG_PARAMETER);
00730 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00731
00732 if (s != TAO_INVOKE_SUCCESS)
00733 return s;
00734 #endif /*TAO_HAS_INTERCEPTORS */
00735
00736 TAO_Transport* transport =
00737 this->resolver_.transport ();
00738
00739 TAO_OutputCDR &cdr = transport->out_stream ();
00740
00741 ACE_TRY
00742 {
00743 cdr.message_attributes (this->details_.request_id (),
00744 this->resolver_.stub (),
00745 TAO_Transport::TAO_ONEWAY_REQUEST,
00746 max_wait_time);
00747
00748 this->write_header (tspec,
00749 cdr
00750 ACE_ENV_ARG_PARAMETER);
00751 ACE_TRY_CHECK;
00752
00753 this->marshal_data (cdr
00754 ACE_ENV_ARG_PARAMETER);
00755 ACE_TRY_CHECK;
00756
00757 countdown.update ();
00758
00759 if (transport->is_connected())
00760 {
00761 // We have a connected transport so we can send the message
00762 s = this->send_message (cdr,
00763 TAO_Transport::TAO_ONEWAY_REQUEST,
00764 max_wait_time
00765 ACE_ENV_ARG_PARAMETER);
00766 ACE_TRY_CHECK;
00767 }
00768 else
00769 {
00770 if (TAO_debug_level > 4)
00771 ACE_DEBUG ((LM_DEBUG,
00772 "TAO (%P|%t) - Synch_Oneway_Invocation::"
00773 "remote_oneway, queueing message\n"));
00774
00775 if (transport->format_queue_message (cdr) != 0)
00776 s = TAO_INVOKE_FAILURE;
00777 }
00778
00779 #if TAO_HAS_INTERCEPTORS == 1
00780 s =
00781 this->receive_other_interception (ACE_ENV_SINGLE_ARG_PARAMETER);
00782 ACE_TRY_CHECK;
00783 #endif /*TAO_HAS_INTERCEPTORS */
00784 }
00785 ACE_CATCHANY
00786 {
00787 #if TAO_HAS_INTERCEPTORS == 1
00788 PortableInterceptor::ReplyStatus status =
00789 this->handle_any_exception (&ACE_ANY_EXCEPTION
00790 ACE_ENV_ARG_PARAMETER);
00791 ACE_TRY_CHECK;
00792
00793 if (status == PortableInterceptor::LOCATION_FORWARD ||
00794 status == PortableInterceptor::TRANSPORT_RETRY)
00795 s = TAO_INVOKE_RESTART;
00796 else if (status == PortableInterceptor::SYSTEM_EXCEPTION
00797 || status == PortableInterceptor::USER_EXCEPTION)
00798 #endif /*TAO_HAS_INTERCEPTORS*/
00799 ACE_RE_THROW;
00800 }
00801 # if defined (ACE_HAS_EXCEPTIONS) \
00802 && defined (ACE_HAS_BROKEN_UNEXPECTED_EXCEPTIONS)
00803 ACE_CATCHALL
00804 {
00805 #if TAO_HAS_INTERCEPTORS == 1
00806 PortableInterceptor::ReplyStatus st =
00807 this->handle_all_exception (ACE_ENV_SINGLE_ARG_PARAMETER);
00808 ACE_TRY_CHECK;
00809
00810 if (st == PortableInterceptor::LOCATION_FORWARD ||
00811 st == PortableInterceptor::TRANSPORT_RETRY)
00812 s = TAO_INVOKE_RESTART;
00813 else
00814 #endif /*TAO_HAS_INTERCEPTORS == 1*/
00815 ACE_RE_THROW;
00816 }
00817 # endif /* ACE_HAS_EXCEPTIONS &&
00818 ACE_HAS_BROKEN_UNEXPECTED_EXCEPTION*/
00819 ACE_ENDTRY;
00820 ACE_CHECK_RETURN (TAO_INVOKE_FAILURE);
00821
00822 return s;
00823 }
|
 1.3.6
1.3.6