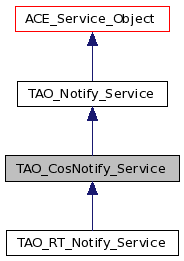
A service object for creating the Notify Service Factory. More...
#include <CosNotify_Service.h>

Public Member Functions | |
| TAO_CosNotify_Service (void) | |
| Constructor. | |
| virtual | ~TAO_CosNotify_Service () |
| Destructor. | |
| virtual int | init (int argc, ACE_TCHAR *argv[]) |
| Init the service from configurator. | |
| virtual void | init_service (CORBA::ORB_ptr orb) |
| Init the service from driver. | |
| virtual int | fini (void) |
| virtual void | init_service2 (CORBA::ORB_ptr orb, CORBA::ORB_ptr dispatching_orb) |
| separate dispatching orb init | |
| virtual void | finalize_service (CosNotifyChannelAdmin::EventChannelFactory_ptr factory) |
| Finalize the service. | |
| virtual CosNotifyChannelAdmin::EventChannelFactory_ptr | create (PortableServer::POA_ptr default_POA, const char *factory_name="EventChannelFactory") |
| Create the Channel Factory. | |
| virtual void | remove (TAO_Notify_EventChannelFactory *ecf) |
| Called by the factory when it is destroyed. | |
Protected Member Functions | |
| virtual void | init_i (CORBA::ORB_ptr orb) |
| Init the data members. | |
| virtual void | init_i2 (CORBA::ORB_ptr orb, CORBA::ORB_ptr dispatching_orb) |
| Init the data members separate dispatching orb. | |
Private Member Functions | |
| virtual TAO_Notify_Factory * | create_factory (void) |
| Create the Factory for Notify objects. | |
| virtual TAO_Notify_Builder * | create_builder (void) |
| Create the Builder for Notify objects. | |
| void | set_threads (CosNotification::QoSProperties &qos, int threads) |
| Set thread options on qos. | |
| TAO_Notify_Factory & | factory () |
| TAO_Notify_Builder & | builder () |
| Service component for building NS participants. | |
Private Attributes | |
| ACE_Auto_Ptr< TAO_Notify_Factory > | factory_ |
| Service component for object factory operations. | |
| ACE_Auto_Ptr< TAO_Notify_Builder > | builder_ |
| Service component for building NS participants. | |
A service object for creating the Notify Service Factory.
Definition at line 37 of file CosNotify_Service.h.
| TAO_CosNotify_Service::TAO_CosNotify_Service | ( | void | ) |
| TAO_CosNotify_Service::~TAO_CosNotify_Service | ( | void | ) | [virtual] |
| TAO_Notify_Builder & TAO_CosNotify_Service::builder | ( | void | ) | [private] |
Service component for building NS participants.
Definition at line 501 of file CosNotify_Service.cpp.
{
ACE_ASSERT( this->builder_.get() != 0 );
return *this->builder_;
}
| CosNotifyChannelAdmin::EventChannelFactory_ptr TAO_CosNotify_Service::create | ( | PortableServer::POA_ptr | default_POA, | |
| const char * | factory_name = "EventChannelFactory" | |||
| ) | [virtual] |
Create the Channel Factory.
Implements TAO_Notify_Service.
Definition at line 481 of file CosNotify_Service.cpp.
{
return this->builder().build_event_channel_factory (poa, factory_name);
}
| TAO_Notify_Builder * TAO_CosNotify_Service::create_builder | ( | void | ) | [private, virtual] |
Create the Builder for Notify objects.
Reimplemented in TAO_RT_Notify_Service.
Definition at line 470 of file CosNotify_Service.cpp.
{
TAO_Notify_Builder* builder = 0;
ACE_NEW_THROW_EX (builder,
TAO_Notify_Builder (),
CORBA::NO_MEMORY ());
return builder;
}
| TAO_Notify_Factory * TAO_CosNotify_Service::create_factory | ( | void | ) | [private, virtual] |
Create the Factory for Notify objects.
Reimplemented in TAO_RT_Notify_Service.
Definition at line 457 of file CosNotify_Service.cpp.
{
TAO_Notify_Factory* factory = ACE_Dynamic_Service<TAO_Notify_Factory>::instance ("TAO_Notify_Factory");
if (factory == 0)
{
ACE_NEW_THROW_EX (factory,
TAO_Notify_Default_Factory (),
CORBA::NO_MEMORY ());
}
return factory;
}
| TAO_Notify_Factory & TAO_CosNotify_Service::factory | ( | void | ) | [private] |
Definition at line 494 of file CosNotify_Service.cpp.
{
ACE_ASSERT( this->factory_.get() != 0 );
return *this->factory_;
}
| void TAO_CosNotify_Service::finalize_service | ( | CosNotifyChannelAdmin::EventChannelFactory_ptr | factory | ) | [virtual] |
Finalize the service.
Implements TAO_Notify_Service.
Definition at line 354 of file CosNotify_Service.cpp.
{
// Get out early if we can
if (CORBA::is_nil (factory))
return;
// Make sure the factory doesn't go away while we're in here
CosNotifyChannelAdmin::EventChannelFactory_var ecf =
CosNotifyChannelAdmin::EventChannelFactory::_duplicate (factory);
// Find all the consumer admin objects and shutdown the worker tasks
CosNotifyChannelAdmin::ChannelIDSeq_var channels =
ecf->get_all_channels ();
CORBA::ULong length = channels->length ();
for(CORBA::ULong i = 0; i < length; i++)
{
try
{
CosNotifyChannelAdmin::EventChannel_var ec =
ecf->get_event_channel (channels[i]);
if (!CORBA::is_nil (ec.in ()))
{
TAO_Notify_EventChannel* nec =
dynamic_cast<TAO_Notify_EventChannel*> (ec->_servant ());
if (nec != 0)
nec->destroy ();
}
}
catch (const CORBA::Exception&)
{
// We're shutting things down, so ignore exceptions
}
}
TAO_Notify_EventChannelFactory* necf =
dynamic_cast<TAO_Notify_EventChannelFactory*> (ecf->_servant ());
if (necf != 0)
necf->stop_validator();
}
| int TAO_CosNotify_Service::fini | ( | void | ) | [virtual] |
Reimplemented from ACE_Shared_Object.
Definition at line 300 of file CosNotify_Service.cpp.
{
if (TAO_Notify_PROPERTIES::instance()->separate_dispatching_orb())
{
if (!CORBA::is_nil (TAO_Notify_PROPERTIES::instance()->dispatching_orb()))
{
CORBA::ORB_var dispatcher =
TAO_Notify_PROPERTIES::instance()->dispatching_orb();
dispatcher->shutdown ();
dispatcher->destroy ();
}
}
TAO_Notify_Properties::instance()->close ();
return 0;
}
| int TAO_CosNotify_Service::init | ( | int | argc, | |
| ACE_TCHAR * | argv[] | |||
| ) | [virtual] |
Init the service from configurator.
Implements TAO_Notify_Service.
Definition at line 30 of file CosNotify_Service.cpp.
{
ACE_Arg_Shifter arg_shifter (argc, argv);
const ACE_TCHAR *current_arg = 0;
// Default to an all reactive system.
int ec_threads = 0;
int consumer_threads = 0;
int supplier_threads = 0;
bool task_per_proxy = false;
TAO_Notify_Properties *properties = TAO_Notify_PROPERTIES::instance();
while (arg_shifter.is_anything_left ())
{
if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-MTDispatching")) == 0)
{
arg_shifter.consume_arg ();
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) The -MTDispatching option has been deprecated, use -DispatchingThreads\n")));
}
else if (0 != (current_arg = arg_shifter.get_the_parameter (ACE_TEXT("-DispatchingThreads"))))
{
consumer_threads += ACE_OS::atoi (current_arg);
arg_shifter.consume_arg ();
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-MTSourceEval")) == 0)
{
arg_shifter.consume_arg ();
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) The -MTSourceEval option has been deprecated, use -SourceThreads\n")));
}
else if (0 != (current_arg = arg_shifter.get_the_parameter (ACE_TEXT("-SourceThreads"))))
{
supplier_threads += ACE_OS::atoi (current_arg);
arg_shifter.consume_arg ();
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-MTLookup")) == 0)
{
arg_shifter.consume_arg ();
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) The -MTLookup option has been deprecated, use -SourceThreads\n")));
}
else if (0 != (current_arg = arg_shifter.get_the_parameter (ACE_TEXT("-LookupThreads"))))
{
supplier_threads += ACE_OS::atoi (current_arg);
arg_shifter.consume_arg ();
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) The -LookupThreads option has been deprecated, use -SourceThreads\n")));
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-MTListenerEval")) == 0)
{
arg_shifter.consume_arg ();
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) The -MTListenerEval option has been deprecated, use -DispatchingThreads\n")));
}
else if (0 != (current_arg = arg_shifter.get_the_parameter (ACE_TEXT("-ListenerThreads"))))
{
// Since this option is always added to consumer_threads, we'll
// deprecate it in favor of that option.
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) The -ListenerThreads option has been deprecated, use -DispatchingThreads\n")));
consumer_threads += ACE_OS::atoi (current_arg);
arg_shifter.consume_arg ();
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-AsynchUpdates")) == 0)
{
arg_shifter.consume_arg ();
properties->asynch_updates (1);
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-NoUpdates")) == 0)
{
arg_shifter.consume_arg ();
properties->updates (0);
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-AllocateTaskperProxy")) == 0)
{
task_per_proxy = true;
arg_shifter.consume_arg ();
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-UseSeparateDispatchingORB")) == 0)
{
current_arg = arg_shifter.get_the_parameter
(ACE_TEXT("-UseSeparateDispatchingORB"));
if (current_arg != 0 &&
(ACE_OS::strcmp(ACE_TEXT ("0"), current_arg) == 0 ||
ACE_OS::strcmp(ACE_TEXT ("1"), current_arg) == 0))
{
properties->separate_dispatching_orb (
static_cast<bool> (ACE_OS::atoi(current_arg)));
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("Using separate Dispatching ORB\n")));
}
else
{
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) WARNING: Unrecognized ")
ACE_TEXT ("argument (%s). Ignoring invalid ")
ACE_TEXT ("-UseSeparateDispatchingORB usage.\n"),
(current_arg == 0 ? ACE_TEXT ("''") : current_arg)));
}
if (current_arg != 0)
arg_shifter.consume_arg ();
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-AllowReconnect")) == 0)
{
arg_shifter.consume_arg ();
TAO_Notify_PROPERTIES::instance()->allow_reconnect (true);
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-DefaultConsumerAdminFilterOp")) == 0)
{
current_arg = arg_shifter.get_the_parameter
(ACE_TEXT("-DefaultConsumerAdminFilterOp"));
CosNotifyChannelAdmin::InterFilterGroupOperator op = CosNotifyChannelAdmin::OR_OP;
if (current_arg != 0 && (ACE_OS::strcmp(ACE_TEXT ("AND"), current_arg) == 0))
op = CosNotifyChannelAdmin::AND_OP;
else if (current_arg != 0 && (ACE_OS::strcmp(ACE_TEXT ("OR"), current_arg) == 0))
op = CosNotifyChannelAdmin::OR_OP;
else
{
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) WARNING: Unrecognized ")
ACE_TEXT ("argument (%s). Ignoring invalid ")
ACE_TEXT ("-DefaultConsumerAdminFilterOp usage.\n"),
(current_arg == 0 ? ACE_TEXT ("''") : current_arg)));
}
properties->defaultConsumerAdminFilterOp (op);
arg_shifter.consume_arg ();
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-DefaultSupplierAdminFilterOp")) == 0)
{
current_arg = arg_shifter.get_the_parameter
(ACE_TEXT("-DefaultSupplierAdminFilterOp"));
CosNotifyChannelAdmin::InterFilterGroupOperator op = CosNotifyChannelAdmin::OR_OP;
if (current_arg != 0 && (ACE_OS::strcmp(ACE_TEXT ("AND"), current_arg) == 0))
op = CosNotifyChannelAdmin::AND_OP;
else if (current_arg != 0 && (ACE_OS::strcmp(ACE_TEXT ("OR"), current_arg) == 0))
op = CosNotifyChannelAdmin::OR_OP;
else
{
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) WARNING: Unrecognized ")
ACE_TEXT ("argument (%s). Ignoring invalid ")
ACE_TEXT ("-DefaultSupplierAdminFilterOp usage.\n"),
(current_arg == 0 ? ACE_TEXT ("''") : current_arg)));
}
properties->defaultSupplierAdminFilterOp (op);
arg_shifter.consume_arg ();
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-ValidateClient")) == 0)
{
arg_shifter.consume_arg ();
TAO_Notify_PROPERTIES::instance()->validate_client (true);
ACE_DEBUG ((LM_DEBUG, ACE_TEXT ("Using reactive client control.\n")));
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-ValidateClientDelay")) == 0)
{
current_arg = arg_shifter.get_the_parameter (ACE_TEXT("-ValidateClientDelay"));
if (current_arg != 0)
{
ACE_Time_Value tv (ACE_OS::atoi (current_arg));
TAO_Notify_PROPERTIES::instance()->validate_client_delay (tv);
}
else
{
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) WARNING: Unrecognized ")
ACE_TEXT ("argument (%s). Ignoring invalid ")
ACE_TEXT ("-ValidateClientDelay usage.\n"),
(current_arg == 0 ? ACE_TEXT ("''") : current_arg)));
}
if (current_arg != 0)
arg_shifter.consume_arg ();
}
else if (arg_shifter.cur_arg_strncasecmp (ACE_TEXT("-ValidateClientInterval")) == 0)
{
current_arg = arg_shifter.get_the_parameter (ACE_TEXT("-ValidateClientInterval"));
if (current_arg != 0)
{
ACE_Time_Value tv (ACE_OS::atoi (current_arg));
TAO_Notify_PROPERTIES::instance()->validate_client_interval (tv);
}
else
{
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) WARNING: Unrecognized ")
ACE_TEXT ("argument (%s). Ignoring invalid ")
ACE_TEXT ("-ValidateClientDelay usage.\n"),
(current_arg == 0 ? ACE_TEXT ("''") : current_arg)));
}
if (current_arg != 0)
arg_shifter.consume_arg ();
}
else
{
ACE_ERROR ((LM_ERROR,
ACE_TEXT ("(%P|%t) Ignoring unknown option for Notify Factory: %s\n"),
arg_shifter.get_current()
));
arg_shifter.consume_arg ();
}
}
// Init the EC QoS
{
CosNotification::QoSProperties qos;
this->set_threads (qos, ec_threads);
properties->default_event_channel_qos_properties (qos);
}
if (!task_per_proxy)
{
// Set the per ConsumerAdmin QoS
{
if (consumer_threads > 0)
ACE_DEBUG((LM_DEBUG, "Using %d threads for each ConsumerAdmin.\n", consumer_threads));
CosNotification::QoSProperties qos;
this->set_threads (qos, consumer_threads);
properties->default_consumer_admin_qos_properties (qos);
}
// Set the per SupplierAdmin QoS
{
if (supplier_threads > 0)
ACE_DEBUG((LM_DEBUG, "Using %d threads for each SupplierAdmin.\n", supplier_threads));
CosNotification::QoSProperties qos;
this->set_threads (qos, supplier_threads);
properties->default_supplier_admin_qos_properties (qos);
}
}
else
{
// Set the per ProxyConsumer QoS
{
if (supplier_threads > 0)
ACE_DEBUG((LM_DEBUG, "Using %d threads for each Supplier.\n", supplier_threads));
CosNotification::QoSProperties qos;
this->set_threads (qos, supplier_threads); // lookup thread per proxy doesn't make sense.
properties->default_proxy_consumer_qos_properties (qos);
}
// Set the per ProxySupplier QoS
{
if (consumer_threads > 0)
ACE_DEBUG((LM_DEBUG, "Using %d threads for each Consumer.\n", consumer_threads));
CosNotification::QoSProperties qos;
this->set_threads (qos, consumer_threads);
properties->default_proxy_supplier_qos_properties (qos);
}
}
return 0;
}
| void TAO_CosNotify_Service::init_i | ( | CORBA::ORB_ptr | orb | ) | [protected, virtual] |
Init the data members.
Reimplemented in TAO_RT_Notify_Service.
Definition at line 397 of file CosNotify_Service.cpp.
{
// Obtain the Root POA
CORBA::Object_var object =
orb->resolve_initial_references("RootPOA");
if (CORBA::is_nil (object.in ()))
ACE_ERROR ((LM_ERROR,
" (%P|%t) Unable to resolve the RootPOA.\n"));
PortableServer::POA_var default_poa = PortableServer::POA::_narrow (object.in ());
// Set the properties
TAO_Notify_Properties* properties = TAO_Notify_PROPERTIES::instance();
properties->orb (orb);
properties->default_poa (default_poa.in ());
// Init the factory
this->factory_.reset (this->create_factory ());
ACE_ASSERT( this->factory_.get() != 0 );
TAO_Notify_PROPERTIES::instance()->factory (this->factory_.get());
this->builder_.reset (this->create_builder ());
ACE_ASSERT( this->builder_.get() != 0 );
TAO_Notify_PROPERTIES::instance()->builder (this->builder_.get());
}
| void TAO_CosNotify_Service::init_i2 | ( | CORBA::ORB_ptr | orb, | |
| CORBA::ORB_ptr | dispatching_orb | |||
| ) | [protected, virtual] |
Init the data members separate dispatching orb.
Definition at line 426 of file CosNotify_Service.cpp.
{
// Obtain the Root POA
CORBA::Object_var object =
orb->resolve_initial_references("RootPOA");
if (CORBA::is_nil (object.in ()))
ACE_ERROR ((LM_ERROR, " (%P|%t) Unable to resolve the RootPOA.\n"));
PortableServer::POA_var default_poa = PortableServer::POA::_narrow (object.in ());
// Set the properties
TAO_Notify_Properties* properties = TAO_Notify_PROPERTIES::instance();
properties->orb (orb);
properties->dispatching_orb (dispatching_orb);
properties->separate_dispatching_orb (true);
properties->default_poa (default_poa.in ());
// Init the factory and builder
this->factory_.reset (this->create_factory ());
ACE_ASSERT( this->factory_.get() != 0 );
TAO_Notify_PROPERTIES::instance()->factory (this->factory_.get());
this->builder_.reset (this->create_builder ());
ACE_ASSERT( this->builder_.get() != 0 );
TAO_Notify_PROPERTIES::instance()->builder (this->builder_.get());
}
| void TAO_CosNotify_Service::init_service | ( | CORBA::ORB_ptr | orb | ) | [virtual] |
Init the service from driver.
Implements TAO_Notify_Service.
Reimplemented in TAO_RT_Notify_Service.
Definition at line 318 of file CosNotify_Service.cpp.
{
ACE_DEBUG ((LM_DEBUG, "Loading the Cos Notification Service...\n"));
if (TAO_Notify_PROPERTIES::instance()->separate_dispatching_orb())
{
// got here by way of svc.conf. no second orb supplied so create one
if (CORBA::is_nil (TAO_Notify_PROPERTIES::instance()->dispatching_orb()))
{
ACE_DEBUG ((LM_DEBUG, "No dispatching orb supplied. Creating default one.\n"));
int argc = 0;
ACE_TCHAR *argv0 = 0;
ACE_TCHAR **argv = &argv0; // ansi requires argv be null terminated.
CORBA::ORB_var dispatcher = CORBA::ORB_init (argc, argv,
"default_dispatcher");
TAO_Notify_PROPERTIES::instance()->dispatching_orb(dispatcher.in());
}
this->init_i2 (orb, TAO_Notify_PROPERTIES::instance()->dispatching_orb());
}
else
{
this->init_i (orb);
}
}
| void TAO_CosNotify_Service::init_service2 | ( | CORBA::ORB_ptr | orb, | |
| CORBA::ORB_ptr | dispatching_orb | |||
| ) | [virtual] |
separate dispatching orb init
Implements TAO_Notify_Service.
Definition at line 348 of file CosNotify_Service.cpp.
{
this->init_i2 (orb, dispatching_orb);
}
| void TAO_CosNotify_Service::remove | ( | TAO_Notify_EventChannelFactory * | ecf | ) | [virtual] |
Called by the factory when it is destroyed.
Definition at line 488 of file CosNotify_Service.cpp.
{
// NOP.
}
| void TAO_CosNotify_Service::set_threads | ( | CosNotification::QoSProperties & | qos, | |
| int | threads | |||
| ) | [private] |
Set thread options on qos.
Definition at line 289 of file CosNotify_Service.cpp.
{
NotifyExt::ThreadPoolParams tp_params =
{NotifyExt::CLIENT_PROPAGATED, 0, 0, (unsigned)threads, 0, 0, 0, 0, 0 };
qos.length (1);
qos[0].name = CORBA::string_dup (NotifyExt::ThreadPool);
qos[0].value <<= tp_params;
}
Service component for building NS participants.
Definition at line 95 of file CosNotify_Service.h.
Service component for object factory operations.
Definition at line 92 of file CosNotify_Service.h.
 1.7.0
1.7.0

