#include <Wait_On_Leader_Follower.h>
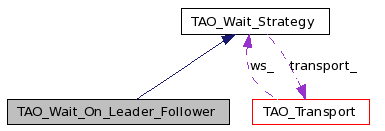
Inheritance diagram for TAO_Wait_On_Leader_Follower:
Public Member Functions | |
| TAO_Wait_On_Leader_Follower (TAO_Transport *transport) | |
| Constructor. | |
| virtual | ~TAO_Wait_On_Leader_Follower (void) |
| Destructor. | |
| virtual int | sending_request (TAO_ORB_Core *orb_core, int two_way) |
| virtual int | wait (ACE_Time_Value *max_wait_time, TAO_Synch_Reply_Dispatcher &rd) |
| virtual int | register_handler (void) |
| virtual bool | non_blocking (void) const |
| virtual bool | can_process_upcalls (void) const |
This implementation is to work with the Muxed Transport Mechanism. Here the state variables such as <Condition ="" variable>=""> etc cannot be kept in the Wait Strategy, since the Wait Strategy is per Transport object and here the Transport is Muxed and hence there are multiple threads running in the same Transport context.
Definition at line 40 of file Wait_On_Leader_Follower.h.
| TAO_BEGIN_VERSIONED_NAMESPACE_DECL TAO_Wait_On_Leader_Follower::TAO_Wait_On_Leader_Follower | ( | TAO_Transport * | transport | ) |
Constructor.
Definition at line 17 of file Wait_On_Leader_Follower.cpp.
00018 : TAO_Wait_Strategy (transport) 00019 { 00020 }
| TAO_Wait_On_Leader_Follower::~TAO_Wait_On_Leader_Follower | ( | void | ) | [virtual] |
| bool TAO_Wait_On_Leader_Follower::can_process_upcalls | ( | void | ) | const [virtual] |
This flag is to check whether the thread can process upcalls while waiting for the reply. Some wait strategies, like Wait_On_LF_No_Upcall does not allow the client threads to process requests while waiting for the reply.
Implements TAO_Wait_Strategy.
Reimplemented in TAO::Wait_On_LF_No_Upcall.
Definition at line 76 of file Wait_On_Leader_Follower.cpp.
| bool TAO_Wait_On_Leader_Follower::non_blocking | ( | void | ) | const [virtual] |
Returns a value to indicate whether the transport needs to set the socket on which it is waiting to non-blocking mode or not.
Implements TAO_Wait_Strategy.
Definition at line 46 of file Wait_On_Leader_Follower.cpp.
| int TAO_Wait_On_Leader_Follower::register_handler | ( | void | ) | [virtual] |
Register the handler needs with the reactor provided that it makes sense for the strategy.
Implements TAO_Wait_Strategy.
Definition at line 35 of file Wait_On_Leader_Follower.cpp.
References TAO_Transport::register_handler(), and TAO_Wait_Strategy::transport_.
00036 { 00037 if (!this->is_registered_) 00038 { 00039 return this->transport_->register_handler (); 00040 } 00041 00042 return 1; 00043 }
| int TAO_Wait_On_Leader_Follower::sending_request | ( | TAO_ORB_Core * | orb_core, | |
| int | two_way | |||
| ) | [virtual] |
The user is going to send a request, prepare any internal variables because the reply may arrive *before* the user calls wait.
Reimplemented from TAO_Wait_Strategy.
Definition at line 52 of file Wait_On_Leader_Follower.cpp.
References TAO_Transport::register_handler(), TAO_Wait_Strategy::sending_request(), and TAO_Wait_Strategy::transport_.
00054 { 00055 // Register the handler. 00056 if (!this->is_registered_) 00057 { 00058 this->transport_->register_handler (); 00059 } 00060 00061 // Send the request. 00062 //@@ LF_WAIT_STRATEGY_SPL_SENDING_REQUEST_HOOK 00063 return this->TAO_Wait_Strategy::sending_request (orb_core, two_way); 00064 }
| int TAO_Wait_On_Leader_Follower::wait | ( | ACE_Time_Value * | max_wait_time, | |
| TAO_Synch_Reply_Dispatcher & | rd | |||
| ) | [virtual] |
Base class virtual method. Wait till the reply_received flag is true or the time expires.
Implements TAO_Wait_Strategy.
Reimplemented in TAO::Wait_On_LF_No_Upcall.
Definition at line 67 of file Wait_On_Leader_Follower.cpp.
References TAO_ORB_Core::leader_follower(), TAO_Transport::orb_core(), TAO_Wait_Strategy::transport_, and TAO_Leader_Follower::wait_for_event().
00069 { 00070 TAO_Leader_Follower &leader_follower = 00071 this->transport_->orb_core ()->leader_follower (); 00072 return leader_follower.wait_for_event (&rd, this->transport_, max_wait_time); 00073 }
 1.4.7
1.4.7