Return (sends) the result back to the task that made the related remote procedure call.
rt_return sends the result result to the task task. If the task calling rt_rpc is not waiting the answer (i.e. killed or timed out) this return message is silently discarded. The returning task tries to release any previously inheredited priority inherediting the highest priority of any rpcing task still waiting for a return, but only if does not own a resource semaphore. In the latter case it will keep the eighest inheredited priority till it has released the resource ownership and no further message is waiting for a return. That means that in the case priority inheritance is coming only from rpced messages the task will return to its base priority when no further message is queued for a return. Such a scheme automatically sets a dynamic priority ceiling in the case priorities are inheredited both from intertask messaging and resource semaphores ownership.
- Returns:
- On success, task (the pointer to the task that is got the reply) is returned. If the reply message has not been sent, 0 is returned. On other failure, a special value is returned as described below:
- 0: The reply message was not delivered.
- 0xFFFF: task does not refer to a valid task.
- Note:
- Since all the messaging functions return a task address, 0xFFFF could seem an inappropriate return value. However on all the CPUs RTAI runs on, 0xFFFF is not an address that can be used by any RTAI task, so it is should be always safe.
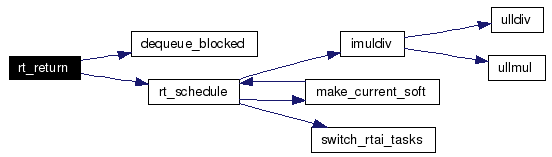
References cpuid, dequeue_blocked(), flags, MSG_ERR, RT_SCHED_DELAYED, RT_SCHED_READY, RT_SCHED_RETURN, rt_schedule(), RT_TASK, and task.
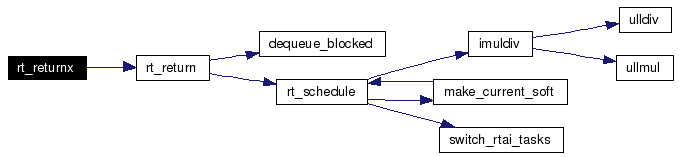
Referenced by rt_receive(), rt_receive_if(), rt_receive_until(), rt_Reply(), RT_return(), and rt_returnx().
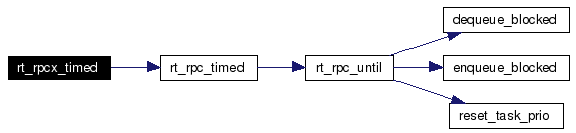
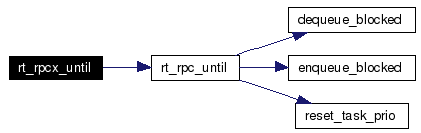
Here is the call graph for this function: