|
Files |
| file | msg.c |
| | Message handling functions.
|
Functions |
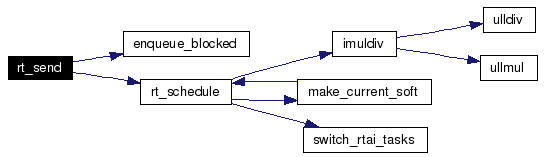
| RT_TASK * | rt_send (RT_TASK *task, unsigned long msg) |
| | Send a message.
|
| RT_TASK * | rt_send_if (RT_TASK *task, unsigned long msg) |
| | Send a message, only if the calling task will not be blocked.
|
| RT_TASK * | rt_send_until (RT_TASK *task, unsigned long msg, RTIME time) |
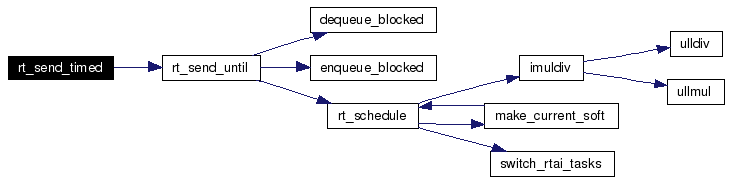
| RT_TASK * | rt_send_timed (RT_TASK *task, unsigned long msg, RTIME delay) |
| RT_TASK * | rt_evdrp (RT_TASK *task, void *msg) |
| | Eavedrop (spy) the content of a message.
|
| RT_TASK * | rt_receive (RT_TASK *task, void *msg) |
| | Receive a message.
|
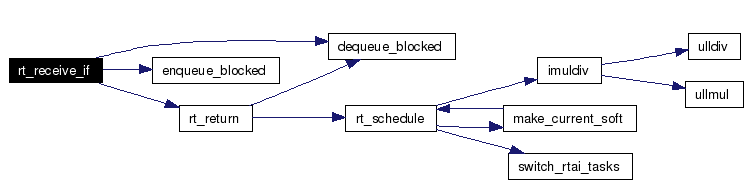
| RT_TASK * | rt_receive_if (RT_TASK *task, void *msg) |
| | Receive a message, only if the calling task is not blocked.
|
| RT_TASK * | rt_receive_until (RT_TASK *task, void *msg, RTIME time) |
| | Receive a message with an absolute timeout.
|
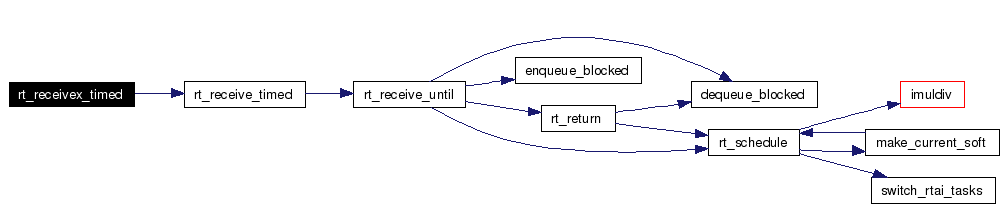
| RT_TASK * | rt_receive_timed (RT_TASK *task, void *msg, RTIME delay) |
| | Receive a message with a relative timeout.
|
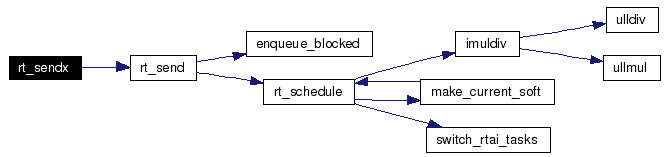
| RT_TASK * | rt_sendx (RT_TASK *task, void *msg, int size) |
| | Send an extended message.
|
| RT_TASK * | rt_sendx_if (RT_TASK *task, void *msg, int size) |
| | Send an extended message, only if the calling task will not be blocked.
|
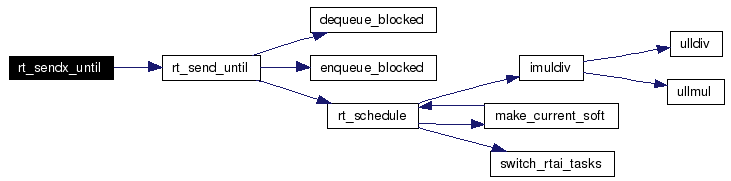
| RT_TASK * | rt_sendx_until (RT_TASK *task, void *msg, int size, RTIME time) |
| | Send an extended message with absolute timeout.
|
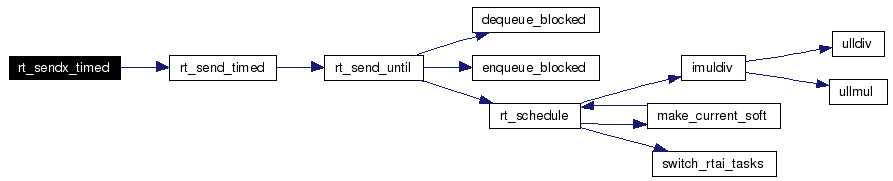
| RT_TASK * | rt_sendx_timed (RT_TASK *task, void *msg, int size, RTIME delay) |
| | Send an extended message with relative timeout.
|
| RT_TASK * | rt_evdrpx (RT_TASK *task, void *msg, int size, int *len) |
| | Eavedrop (spy) the content of an extended message.
|
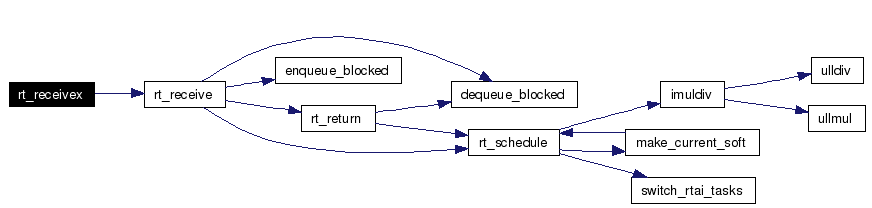
| RT_TASK * | rt_receivex (RT_TASK *task, void *msg, int size, int *len) |
| | Receive an extended message.
|
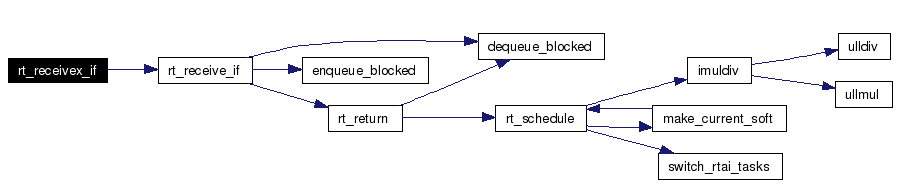
| RT_TASK * | rt_receivex_if (RT_TASK *task, void *msg, int size, int *len) |
| | Receive an extended message, only if the calling task is not blocked.
|
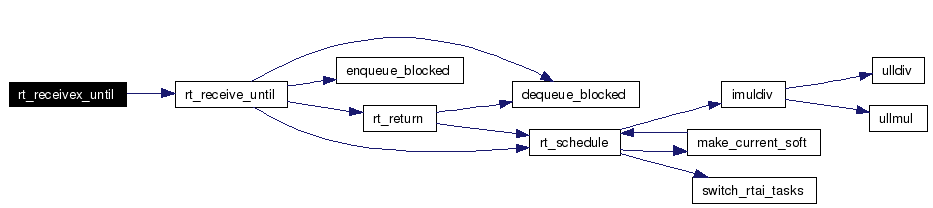
| RT_TASK * | rt_receivex_until (RT_TASK *task, void *msg, int size, int *len, RTIME time) |
| | Receive an extended message with an absolute timeout.
|
| RT_TASK * | rt_receivex_timed (RT_TASK *task, void *msg, int size, int *len, RTIME delay) |
| | Receive an extended message with a relative timeout.
|
|
|
Receive a message.
rt_receive gets a message from the task specified by task. If task is equal to 0, the caller accepts messages from any task. If there is a pending message, rt_receive does not block but can be preempted if the task that rt_sent the just received message has a higher priority. The task will not block if it receives rpced messages since rpcing tasks always waits for a returned message. Moreover it inheredits the highest priority of any rpcing task waiting on the receive queue. The receiving task will then recover its priority as explained in rt_return. Otherwise the caller task is blocked waiting for any message to be sent/rpced.
- Parameters:
-
| task | is a pointer to a RT_TASK structure. |
| msg | points to any 4 bytes word buffer provided by the caller. |
- Returns:
- a pointer to the sender task is returned upon success.
0 is returned if the caller is unblocked but no message has been received (e.g. the task task was killed before sending the message.)
A special value is returned on other failure. The errors are described below:
- 0: the sender task was killed before sending the message;
- 0xFFFF: task does not refer to a valid task.
- Note:
- Since all the messaging functions return a task address 0xFFFF could seem an inappropriate return value. However on all the CPUs RTAI runs on 0xFFFF is not an address that can be used by any RTAI task, so it is should be always safe.
Definition at line 817 of file msg.c.
References cpuid, dequeue_blocked(), enqueue_blocked(), flags, MSG_ERR, rt_return(), RT_SCHED_DELAYED, RT_SCHED_READY, RT_SCHED_RECEIVE, RT_SCHED_RETURN, RT_SCHED_RPC, RT_SCHED_SEND, rt_schedule(), RT_TASK, and task.
Referenced by rt_Receive(), RT_receive(), and rt_receivex().
Here is the call graph for this function: 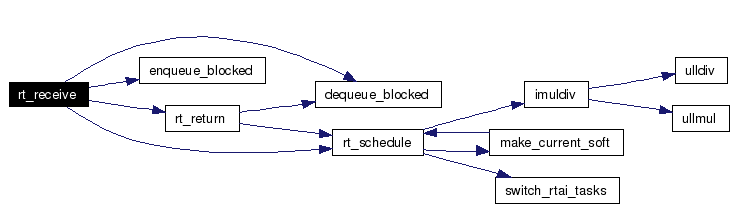
|
|
|
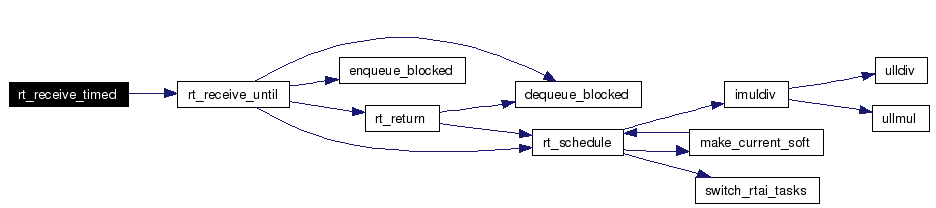
Receive a message with an absolute timeout.
rt_receive_until receives a message from the task specified by task. If task is equal to 0, the caller accepts messages from any task. If there is a pending message, rt_receive does not block but but can be preempted if the task that rt_sent the just received message has a higher priority. The task will not block if it receives rpced messages since rpcing tasks always waits for a returned message. Moreover it inheredits the highest priority of any rpcing task waiting on the receive queue. The receiving task will then recover its priority as explained in rt_return. Otherwise the caller task is blocked waiting for any message to be sent/rpced. In this case these functions return if: a sender sends a message and has a lower priority; any rpced message is received;
- timeout occurs;
- an error occurs (e.g. the sender task is killed.)
- Parameters:
-
| task | is a pointer to the task structure. |
| msg | points to a buffer provided by the caller. |
| time | is an absolute timout value. |
- Returns:
- On success, a pointer to the sender task is returned. On other failure, a special value is returned. The errors are described below:
- 0: there was no message to receive.
- 0xFFFF: task does not refer to a valid task.
- Note:
- Since all the messaging functions return a task address 0xFFFF could seem an inappropriate return value. However on all the CPUs RTAI runs on 0xFFFF is not an address that can be used by any RTAI task, so it is should be always safe.
See also: rt_receive_timed(). Definition at line 988 of file msg.c.
References cpuid, dequeue_blocked(), enqueue_blocked(), flags, MSG_ERR, rt_return(), RT_SCHED_DELAYED, RT_SCHED_READY, RT_SCHED_RECEIVE, RT_SCHED_RETURN, RT_SCHED_RPC, RT_SCHED_SEND, rt_schedule(), RT_TASK, RTIME, and task.
Referenced by rt_receive_timed(), RT_receive_until(), and rt_receivex_until().
Here is the call graph for this function: 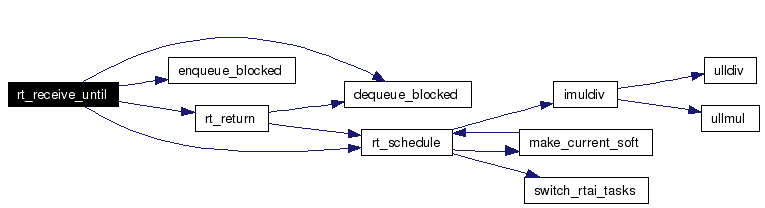
|
|
|
brief Send a message with an absolute timeout.
rt_send_until sends the message msg to the task task. If the receiver task is ready to get the message, this function does not block the sending task, but its execution can be preempted if the receiving task has a higher priority. Otherwise the caller task is blocked and queued up in priority order on the receive list of the sent task. In this case the function returns if:
- the caller task is in the first place of the waiting queue and the receiver gets the message and has a lower priority;
- a timeout occurs;
- an error occurs (e.g. the receiver task is killed).
- Parameters:
-
| task | is a pointer to a task structure. |
| msg | corresponds to the message that has to be sent. |
| time | is the absolute timeout value. |
- Returns:
- the pointer to the task that received the message is returned on success i.e. the message received before timeout expiration.
0 is returned if the message has not been sent. A special value is returned on other failure. The errors are described below:
- 0: operation timed out, message was not delivered;
- 0xFFFF: task does not refer to a valid task.
See also: rt_send_timed().
- Note:
- Since all the messaging functions return a task address 0xFFFF could seem an inappropriate return value. However on all the CPUs RTAI runs on 0xFFFF is not an address that can be used by any RTAI task, so it is should be safe always.
Definition at line 226 of file msg.c.
References cpuid, dequeue_blocked(), enqueue_blocked(), flags, MSG_ERR, RT_SCHED_DELAYED, RT_SCHED_READY, RT_SCHED_RECEIVE, RT_SCHED_SEND, rt_schedule(), RT_TASK, RTIME, and task.
Referenced by rt_send_timed(), RT_send_until(), and rt_sendx_until().
Here is the call graph for this function: 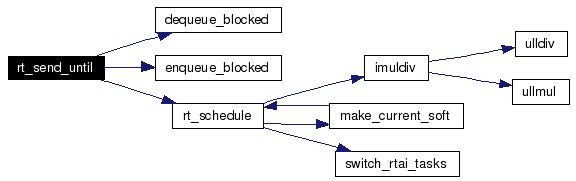
|