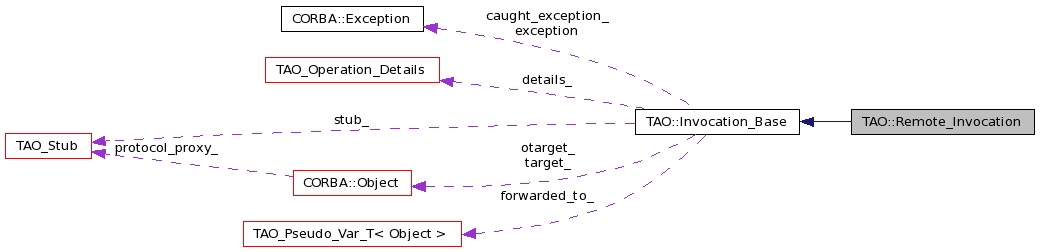
Base class for remote invocations. More...
#include <Remote_Invocation.h>

Public Member Functions | |
| Remote_Invocation (CORBA::Object_ptr otarget, Profile_Transport_Resolver &resolver, TAO_Operation_Details &detail, bool response_expected) | |
Protected Member Functions | |
| void | init_target_spec (TAO_Target_Specification &spec, TAO_OutputCDR &output) |
| Initialize the spec. | |
| void | write_header (TAO_OutputCDR &out_stream) |
| Write the GIOP header into the stream. | |
| void | marshal_data (TAO_OutputCDR &cdr) |
| Marshal the arguments into the stream. | |
| Invocation_Status | send_message (TAO_OutputCDR &cdr, TAO_Message_Semantics message_semantics, ACE_Time_Value *max_wait_time) |
| Write the message onto the socket. | |
Protected Attributes | |
| Profile_Transport_Resolver & | resolver_ |
| Our resolver. | |
Base class for remote invocations.
This class encapulates some of the common functionalities used by synchronous, asynchronous, DII and DSI invocations.
Definition at line 46 of file Remote_Invocation.h.
| TAO::Remote_Invocation::Remote_Invocation | ( | CORBA::Object_ptr | otarget, | |
| Profile_Transport_Resolver & | resolver, | |||
| TAO_Operation_Details & | detail, | |||
| bool | response_expected | |||
| ) |
| otarget | The original target on which this invocation was started. This is there to be passed up to its parent class. | |
| resolver | The profile and transport holder. | |
| detail | Pperation details of the invocation on the target | |
| response_expected | Flag to indicate whether the operation encapsulated by op returns a response or not. |
Definition at line 23 of file Remote_Invocation.cpp.
: Invocation_Base (otarget, resolver.object (), resolver.stub (), detail, response_expected, true /* request_is_remote */ ) , resolver_ (resolver) { }
| void TAO::Remote_Invocation::init_target_spec | ( | TAO_Target_Specification & | spec, | |
| TAO_OutputCDR & | output | |||
| ) | [protected] |
Initialize the spec.
Definition at line 39 of file Remote_Invocation.cpp.
{
// Generate all service contexts
this->resolver_.stub ()->orb_core ()->service_context_registry ().
generate_service_context (
this->resolver_.stub (),
*this->resolver_.transport (),
this->details_,
target_spec,
output);
TAO_Profile *pfile = this->resolver_.profile ();
// Set the target specification mode
switch (pfile->addressing_mode ())
{
case TAO_Target_Specification::Key_Addr:
target_spec.target_specifier (pfile->object_key ());
break;
case TAO_Target_Specification::Profile_Addr:
{
IOP::TaggedProfile *tp = pfile->create_tagged_profile ();
if (tp)
{
target_spec.target_specifier (*tp);
}
}
break;
case TAO_Target_Specification::Reference_Addr:
// We need to call the method seperately. If there is no
// IOP::IOR info, the call would create the info and return the
// index that we need.
CORBA::ULong index = 0;
IOP::IOR *ior_info = 0;
if (this->resolver_.stub ()->create_ior_info (ior_info, index) == -1)
{
if (TAO_debug_level > 0)
{
ACE_ERROR ((LM_ERROR,
ACE_TEXT ("TAO (%P|%t) - ")
ACE_TEXT ("Remote_Invocation::init_target_spec, ")
ACE_TEXT ("Error in finding index for ")
ACE_TEXT ("IOP::IOR\n")));
}
return;
}
target_spec.target_specifier (*ior_info, index);
break;
}
}
| void TAO::Remote_Invocation::marshal_data | ( | TAO_OutputCDR & | cdr | ) | [protected] |
Marshal the arguments into the stream.
Definition at line 116 of file Remote_Invocation.cpp.
{
// Marshal application data
if (this->details_.marshal_args (out_stream) == false)
{
throw ::CORBA::MARSHAL ();
}
}
| Invocation_Status TAO::Remote_Invocation::send_message | ( | TAO_OutputCDR & | cdr, | |
| TAO_Message_Semantics | message_semantics, | |||
| ACE_Time_Value * | max_wait_time | |||
| ) | [protected] |
Write the message onto the socket.
Definition at line 126 of file Remote_Invocation.cpp.
{
TAO_Protocols_Hooks *tph =
this->resolver_.stub ()->orb_core ()->get_protocols_hooks ();
TAO_Network_Priority_Protocols_Hooks *nph =
this->resolver_.stub ()->orb_core ()->
get_network_priority_protocols_hooks ();
TAO_Connection_Handler *connection_handler =
this->resolver_.transport ()->connection_handler ();
if (nph != 0)
{
// nph = 0, means DiffServ library is not used
// nph = 0, means DiffServ library is used, and
// request DSCP and reply DSCP are set.
// Note that the application could still be using
// RTCORBA, but still setting DIffServ codepoints
// using the DiffServ library takes precedence.
//
CORBA::Long const dscp = nph->get_dscp_codepoint (this->resolver_.stub (),
this->resolver_.object ());
connection_handler->set_dscp_codepoint (dscp);
}
else if (tph != 0)
{
// If we execute this code, DiffServ library is not used,
// but RTCORBA could be used.
// Which means that using the enable_network_priority flag,
// the application might want to set DiffServ codepoints.
// Check if that is the case.
//
CORBA::Boolean const set_client_network_priority =
tph->set_client_network_priority (
this->resolver_.transport ()->tag (),
this->resolver_.stub ());
connection_handler->set_dscp_codepoint (set_client_network_priority);
}
// Note that if noth nph and tph are 0, then we do not make any
// virtual calls any more, because we have removed the default
// implementations.
if (! this->resolver_.transport ()->is_connected()) {
throw ::CORBA::TRANSIENT (CORBA::OMGVMCID | 2, CORBA::COMPLETED_NO);
}
int const retval =
this->resolver_.transport ()->send_request (
this->resolver_.stub (),
this->resolver_.stub ()->orb_core (),
cdr,
message_semantics,
max_wait_time);
if (retval == -1)
{
if (errno == ETIME)
{
// We sent a message already and we haven't gotten a
// reply. Just throw TIMEOUT with *COMPLETED_MAYBE*.
throw ::CORBA::TIMEOUT (
CORBA::SystemException::_tao_minor_code (
TAO_TIMEOUT_SEND_MINOR_CODE,
errno),
CORBA::COMPLETED_MAYBE);
}
if (TAO_debug_level > 2)
{
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("TAO (%P|%t) - ")
ACE_TEXT ("Remote_Invocation::send_message, ")
ACE_TEXT ("failure while sending message\n")));
}
// Close the transport and all the associated stuff along with
// it.
this->resolver_.transport ()->close_connection ();
this->resolver_.stub ()->reset_profiles ();
return TAO_INVOKE_RESTART;
}
this->resolver_.stub ()->set_valid_profile ();
return TAO_INVOKE_SUCCESS;
}
| void TAO::Remote_Invocation::write_header | ( | TAO_OutputCDR & | out_stream | ) | [protected] |
Write the GIOP header into the stream.
Definition at line 97 of file Remote_Invocation.cpp.
{
this->resolver_.transport ()->clear_translators (0, &out_stream);
TAO_Target_Specification spec;
this->init_target_spec (spec, out_stream);
// Send the request for the header
if (this->resolver_.transport ()->generate_request_header (this->details_,
spec,
out_stream) == -1)
{
throw ::CORBA::MARSHAL ();
}
this->resolver_.transport ()->assign_translators (0, &out_stream);
}
Profile_Transport_Resolver& TAO::Remote_Invocation::resolver_ [protected] |
Our resolver.
Definition at line 84 of file Remote_Invocation.h.
 1.7.0
1.7.0

