#include <Asynch_Invocation.h>

Public Member Functions | |
| Asynch_Remote_Invocation (CORBA::Object_ptr otarget, Profile_Transport_Resolver &resolver, TAO_Operation_Details &detail, TAO_Asynch_Reply_Dispatcher_Base *rd, bool response_expected=true) | |
| Invocation_Status | remote_invocation (ACE_Time_Value *value) |
Protected Attributes | |
| ACE_Utils::Auto_Functor < TAO_Asynch_Reply_Dispatcher_Base, ARDB_Refcount_Functor > | safe_rd_ |
Definition at line 43 of file Asynch_Invocation.h.
| TAO::Asynch_Remote_Invocation::Asynch_Remote_Invocation | ( | CORBA::Object_ptr | otarget, | |
| Profile_Transport_Resolver & | resolver, | |||
| TAO_Operation_Details & | detail, | |||
| TAO_Asynch_Reply_Dispatcher_Base * | rd, | |||
| bool | response_expected = true | |||
| ) |
Definition at line 6 of file Asynch_Invocation.cpp.
: Asynch_Invocation.cpp 84457 2009-02-13 14:52:13Z msmit $")
| Invocation_Status TAO::Asynch_Remote_Invocation::remote_invocation | ( | ACE_Time_Value * | value | ) |
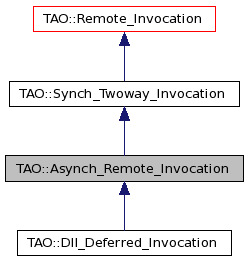
Reimplemented in TAO::DII_Deferred_Invocation.
Definition at line 21 of file Asynch_Invocation.cpp.
: Asynch_Invocation.cpp 84457 2009-02-13 14:52:13Z msmit $") TAO_BEGIN_VERSIONED_NAMESPACE_DECL namespace TAO { Asynch_Remote_Invocation::Asynch_Remote_Invocation ( CORBA::Object_ptr otarget, Profile_Transport_Resolver &resolver, TAO_Operation_Details &detail, TAO_Asynch_Reply_Dispatcher_Base *rd, bool response_expected) : Synch_Twoway_Invocation (otarget, resolver, detail, response_expected) , safe_rd_ (rd) { } Invocation_Status Asynch_Remote_Invocation::remote_invocation (ACE_Time_Value *max_wait_time) { Invocation_Status s = TAO_INVOKE_FAILURE; #if TAO_HAS_INTERCEPTORS == 1 s = this->send_request_interception (); if (s != TAO_INVOKE_SUCCESS) return s; // We have started the interception flow. We need to call the // ending interception flow if things go wrong. The purpose of the // try block is to take care of the cases when things go wrong. try { #endif /* TAO_HAS_INTERCEPTORS */ TAO_Transport* const transport = this->resolver_.transport (); if (!transport) { // Way back, we failed to find a profile we could connect to. // We've come this far only so we reach the interception points // in case they can fix things. Time to bail.... throw CORBA::TRANSIENT (CORBA::OMGVMCID | 2, CORBA::COMPLETED_NO); } ACE_GUARD_RETURN (TAO_SYNCH_MUTEX, ace_mon, transport->output_cdr_lock (), TAO_INVOKE_FAILURE); TAO_OutputCDR & cdr = this->resolver_.transport ()->messaging_object ()->out_stream (); // Oneway semantics. See comments for below send_message() // call. cdr.message_attributes (this->details_.request_id (), this->resolver_.stub (), TAO_ONEWAY_REQUEST, max_wait_time); this->write_header (cdr); this->marshal_data (cdr); // Register a reply dispatcher for this invocation. Use the // preallocated reply dispatcher. TAO_Bind_Dispatcher_Guard dispatch_guard ( this->details_.request_id (), this->safe_rd_.get (), transport->tms ()); // Now that we have bound the reply dispatcher to the map, just // loose ownership of the reply dispatcher. this->safe_rd_.release (); if (dispatch_guard.status () != 0) { // @@ What is the right way to handle this error? Do we need // to call the interceptors in this case? throw ::CORBA::INTERNAL (TAO::VMCID, CORBA::COMPLETED_NO); } // Do not unbind during destruction. We need the entry to be // there in the map since the reply dispatcher depends on // that. This is also a trigger to loose the ownership of the // reply dispatcher. dispatch_guard.status (TAO_Bind_Dispatcher_Guard::NO_UNBIND); // Send it as a oneway request. It will make all the required // paraphernalia within the ORB to fire, like buffering if // send blocks etc. s = this->send_message (cdr, TAO_ONEWAY_REQUEST, max_wait_time); ace_mon.release(); #if TAO_HAS_INTERCEPTORS == 1 // NOTE: We don't need to do the auto_ptr <> trick. We got here // in the first place since the message was sent properly, // which implies a reply would be available. Therefore the // reply dispatcher should be available for another thread to // collect and dispatch the reply. In MT cases, things are // more hairy. Just imagine what happens when another thread // is collecting the reply when we are happily invoking // interceptors? // Nothing great on here. If we get a restart during send or a // proper send, we are supposed to call receiver_other () // interception point. So we do that here Invocation_Status const tmp = this->receive_other_interception (); // We got an error during the interception. if (s == TAO_INVOKE_SUCCESS && tmp != TAO_INVOKE_SUCCESS) s = tmp; #endif /* TAO_HAS_INTERCEPTORS */ // If an error occurred just return. At this point all the // endpoint interception would have been invoked. The callee // would take care of the rest. if (s != TAO_INVOKE_SUCCESS) return s; // NOTE: Not sure how things are handles with exclusive muxed // strategy. if (transport->idle_after_send ()) (void) this->resolver_.transport_released (); #if TAO_HAS_INTERCEPTORS == 1 } catch ( ::CORBA::Exception& ex) { PortableInterceptor::ReplyStatus const status = this->handle_any_exception (&ex); if (status == PortableInterceptor::LOCATION_FORWARD || status == PortableInterceptor::TRANSPORT_RETRY) s = TAO_INVOKE_RESTART; else if (status == PortableInterceptor::SYSTEM_EXCEPTION
ACE_Utils::Auto_Functor<TAO_Asynch_Reply_Dispatcher_Base, ARDB_Refcount_Functor> TAO::Asynch_Remote_Invocation::safe_rd_ [protected] |
Definition at line 59 of file Asynch_Invocation.h.
 1.7.0
1.7.0

