#include <EC_Dispatching_Task.h>
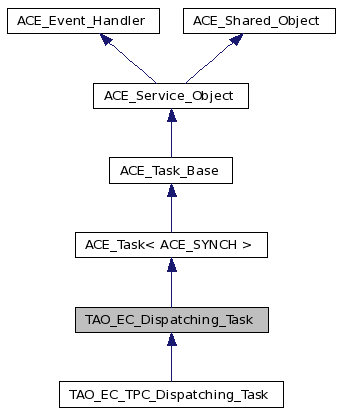
Inheritance diagram for TAO_EC_Dispatching_Task:
Public Member Functions | |
| TAO_EC_Dispatching_Task (ACE_Thread_Manager *thr_manager=0, TAO_EC_Queue_Full_Service_Object *queue_full_service_object=0) | |
| Constructor. | |
| virtual int | svc (void) |
| Process the events in the queue. | |
| virtual void | push (TAO_EC_ProxyPushSupplier *proxy, RtecEventComm::PushConsumer_ptr consumer, RtecEventComm::EventSet &event) |
Private Attributes | |
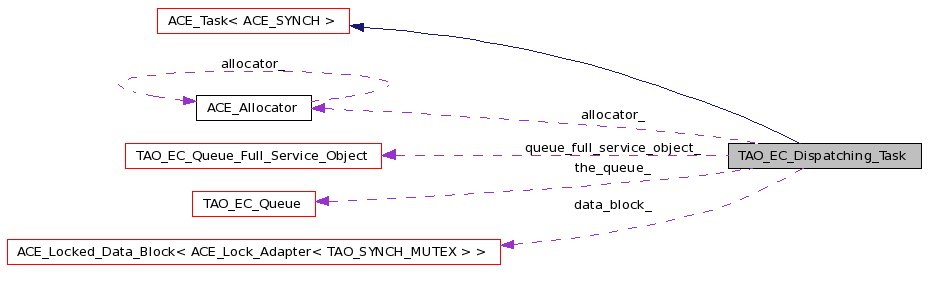
| ACE_Allocator * | allocator_ |
| An per-task allocator. | |
| ACE_Locked_Data_Block< ACE_Lock_Adapter< TAO_SYNCH_MUTEX > > | data_block_ |
| Helper data structure to minimize memory allocations... | |
| TAO_EC_Queue | the_queue_ |
| The queue. | |
| TAO_EC_Queue_Full_Service_Object * | queue_full_service_object_ |
Definition at line 99 of file EC_Dispatching_Task.h.
| ACE_INLINE TAO_EC_Dispatching_Task::TAO_EC_Dispatching_Task | ( | ACE_Thread_Manager * | thr_manager = 0, |
|
| TAO_EC_Queue_Full_Service_Object * | queue_full_service_object = 0 | |||
| ) |
Constructor.
Definition at line 32 of file EC_Dispatching_Task.inl.
References ACE_Task< ACE_SYNCH >::msg_queue().
00033 : ACE_Task<ACE_SYNCH> (thr_manager), 00034 allocator_ (0), 00035 the_queue_ (TAO_EC_QUEUE_HWM, TAO_EC_QUEUE_LWM), 00036 queue_full_service_object_ (so) 00037 { 00038 this->msg_queue (&this->the_queue_); 00039 }
| void TAO_EC_Dispatching_Task::push | ( | TAO_EC_ProxyPushSupplier * | proxy, | |
| RtecEventComm::PushConsumer_ptr | consumer, | |||
| RtecEventComm::EventSet & | event | |||
| ) | [virtual] |
Definition at line 140 of file EC_Dispatching_Task.cpp.
References allocator_, CORBA::COMPLETED_NO, ACE_Allocator::instance(), ACE_Allocator::malloc(), ACE_Task< ACE_SYNCH >::putq(), TAO_EC_Queue_Full_Service_Object::queue_full_action(), queue_full_service_object_, TAO_EC_Queue_Full_Service_Object::SILENTLY_DISCARD, and TAO::VMCID.
Referenced by TAO_EC_TPC_Dispatching::push_nocopy(), TAO_EC_RTCORBA_Dispatching::push_nocopy(), TAO_EC_Priority_Dispatching::push_nocopy(), and TAO_EC_MT_Dispatching::push_nocopy().
00143 { 00144 if (this->msg_queue()->is_full ()) 00145 { 00146 if (0 != this->queue_full_service_object_) 00147 { 00148 int action = 00149 this->queue_full_service_object_->queue_full_action (this, proxy, 00150 consumer, event); 00151 00152 if (action == TAO_EC_Queue_Full_Service_Object::SILENTLY_DISCARD) 00153 return; 00154 // if action == WAIT_TO_EMPTY then we just go ahead and queue it 00155 } 00156 // else go ahead and queue it 00157 } 00158 00159 if (this->allocator_ == 0) 00160 this->allocator_ = ACE_Allocator::instance (); 00161 00162 void* buf = this->allocator_->malloc (sizeof (TAO_EC_Push_Command)); 00163 00164 if (buf == 0) 00165 throw CORBA::NO_MEMORY (TAO::VMCID, CORBA::COMPLETED_NO); 00166 00167 ACE_Message_Block *mb = 00168 new (buf) TAO_EC_Push_Command (proxy, 00169 consumer, 00170 event, 00171 this->data_block_.duplicate (), 00172 this->allocator_); 00173 this->putq (mb); 00174 }
| int TAO_EC_Dispatching_Task::svc | ( | void | ) | [virtual] |
Process the events in the queue.
Reimplemented from ACE_Task_Base.
Definition at line 100 of file EC_Dispatching_Task.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_ERROR, TAO_EC_Dispatch_Command::execute(), ACE_OS::last_error(), LM_ERROR, and ACE_Message_Block::release().
00101 { 00102 int done = 0; 00103 while (!done) 00104 { 00105 try 00106 { 00107 ACE_Message_Block *mb = 0; 00108 if (this->getq (mb) == -1) 00109 if (ACE_OS::last_error () == ESHUTDOWN) 00110 return 0; 00111 else 00112 ACE_ERROR ((LM_ERROR, 00113 "EC (%P|%t) getq error in Dispatching Queue\n")); 00114 00115 TAO_EC_Dispatch_Command *command = 00116 dynamic_cast<TAO_EC_Dispatch_Command*> (mb); 00117 00118 if (command == 0) 00119 { 00120 ACE_Message_Block::release (mb); 00121 continue; 00122 } 00123 00124 int result = command->execute (); 00125 00126 ACE_Message_Block::release (mb); 00127 00128 if (result == -1) 00129 done = 1; 00130 } 00131 catch (const CORBA::Exception& ex) 00132 { 00133 ex._tao_print_exception ("EC (%P|%t) exception in dispatching queue"); 00134 } 00135 } 00136 return 0; 00137 }
ACE_Allocator* TAO_EC_Dispatching_Task::allocator_ [private] |
ACE_Locked_Data_Block<ACE_Lock_Adapter<TAO_SYNCH_MUTEX> > TAO_EC_Dispatching_Task::data_block_ [private] |
Helper data structure to minimize memory allocations...
Definition at line 117 of file EC_Dispatching_Task.h.
 1.4.7
1.4.7