#include <EC_TPC_Dispatching.h>
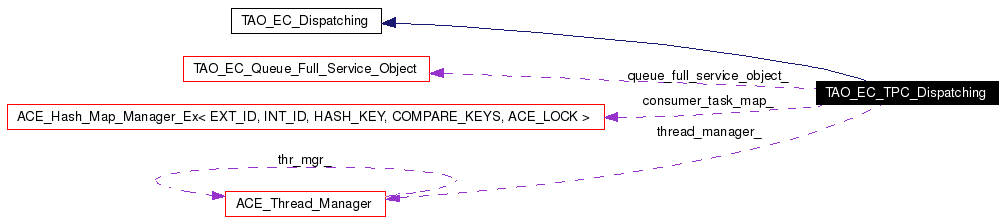
Inheritance diagram for TAO_EC_TPC_Dispatching:
Public Member Functions | |
| TAO_EC_TPC_Dispatching (int nthreads, int thread_creation_flags, int thread_priority, int force_activate, TAO_EC_Queue_Full_Service_Object *so) | |
| ~TAO_EC_TPC_Dispatching () | |
| virtual void | activate (void) |
| virtual void | shutdown (void) |
| virtual void | push (TAO_EC_ProxyPushSupplier *proxy, RtecEventComm::PushConsumer_ptr consumer, const RtecEventComm::EventSet &event, TAO_EC_QOS_Info &qos_info) |
| virtual void | push_nocopy (TAO_EC_ProxyPushSupplier *proxy, RtecEventComm::PushConsumer_ptr consumer, RtecEventComm::EventSet &event, TAO_EC_QOS_Info &qos_info) |
| int | add_consumer (RtecEventComm::PushConsumer_ptr consumer) |
| int | remove_consumer (RtecEventComm::PushConsumer_ptr consumer) |
Private Types | |
| typedef ACE_Hash_Map_Manager_Ex< RtecEventComm::PushConsumer_ptr, TAO_EC_Dispatching_Task *, ACE_Pointer_Hash< RtecEventComm::PushConsumer_ptr >, ACE_Equal_To< RtecEventComm::PushConsumer_ptr >, ACE_Null_Mutex > | MAPTYPE |
Private Attributes | |
| ACE_Thread_Manager | thread_manager_ |
| int | nthreads_ |
| The number of active tasks. | |
| int | thread_creation_flags_ |
| int | thread_priority_ |
| The priority of the dispatching threads. | |
| int | force_activate_ |
| MAPTYPE | consumer_task_map_ |
| ACE_SYNCH_MUTEX | lock_ |
| TAO_EC_Queue_Full_Service_Object * | queue_full_service_object_ |
This strategy uses a thread per consumer, and was specifically designed to isolate the effects of an ill-behaved consumer from affecting other consumers.
Definition at line 39 of file EC_TPC_Dispatching.h.
|
|
Definition at line 82 of file EC_TPC_Dispatching.h. |
|
||||||||||||||||||||||||
|
Definition at line 18 of file EC_TPC_Dispatching.cpp. References ACE_ASSERT, and TAO_EC_TPC_DISPATCHING_DEFAULT_MAP_SIZE.
00023 : nthreads_(nthreads) 00024 , thread_creation_flags_ (thread_creation_flags) 00025 , thread_priority_ (thread_priority) 00026 , force_activate_ (force_activate) 00027 , consumer_task_map_(TAO_EC_TPC_DISPATCHING_DEFAULT_MAP_SIZE) 00028 , queue_full_service_object_(so) 00029 { 00030 ACE_ASSERT (this->queue_full_service_object_ != 0); 00031 } |
|
|
Definition at line 33 of file EC_TPC_Dispatching.cpp.
00034 {
00035 // No other dispatching strategy has a DTOR body. I can only
00036 // assume that it's guaranteed that shutdown() is called before
00037 // the DTOR, so the tear-down logic needs to go in the shutdown,
00038 // and the DTOR need not call shutdown.
00039 }
|
|
|
Initialize all the data structures, activate any internal threads, etc. Implements TAO_EC_Dispatching. Definition at line 127 of file EC_TPC_Dispatching.cpp.
00128 {
00129 }
|
|
|
Definition at line 42 of file EC_TPC_Dispatching.cpp. References ACE_DEBUG, ACE_GUARD_RETURN, ACE_SYNCH_MUTEX, ACE_Task_Base::activate(), ACE_Hash_Map_Manager_Ex< EXT_ID, INT_ID, HASH_KEY, COMPARE_KEYS, ACE_LOCK >::bind(), consumer_task_map_, LM_DEBUG, LM_WARNING, ACE_Task< ACE_SYNCH >::putq(), TAO_EC_TPC_debug_level, and ACE_Task_Base::wait(). Referenced by TAO_EC_TPC_ProxyPushSupplier::connect_push_consumer().
00043 {
00044 ACE_GUARD_RETURN (ACE_SYNCH_MUTEX, ace_mon, this->lock_, -1);
00045
00046 // Duplicate the pointer and hold it safely
00047 RtecEventComm::PushConsumer_var pc =
00048 RtecEventComm::PushConsumer::_duplicate(consumer);
00049
00050 if (TAO_EC_TPC_debug_level > 0)
00051 ACE_DEBUG ((LM_DEBUG, "EC (%P|%t) TPC_Dispatching::add_consumer(%@)\n", pc.in()));
00052
00053 TAO_EC_Dispatching_Task* dtask =
00054 new TAO_EC_TPC_Dispatching_Task (&this->thread_manager_,
00055 this->queue_full_service_object_);
00056
00057 if (TAO_EC_TPC_debug_level > 0)
00058 ACE_DEBUG ((LM_DEBUG, "EC (%P|%t) TPC_Dispatching::add_consumer(%@): new task %@\n", pc.in(), dtask));
00059
00060 if ((dtask->activate (this->thread_creation_flags_,
00061 1, // we only want one thread to dispatch to a consumer
00062 1, // magic number??
00063 this->thread_priority_)) == -1)
00064 {
00065 ACE_DEBUG ((LM_WARNING,
00066 "EC (%P|%t): TPC_Dispatching::add_consumer unable to activate"
00067 " dispatching task for consumer (%@)\n",
00068 consumer));
00069 delete dtask;
00070 return -1;
00071 }
00072
00073 int bindresult =
00074 this->consumer_task_map_.bind (RtecEventComm::PushConsumer::_duplicate(pc.in()),
00075 dtask);
00076 const char* explanation = 0;
00077 if (bindresult == -1)
00078 explanation = "general failure";
00079 else if (bindresult == 1)
00080 explanation = "entry already exists";
00081
00082 if (explanation != 0)
00083 {
00084 ACE_DEBUG ((LM_WARNING,
00085 "EC (%P|%t): TPC_Dispatching::add_consumer failed to bind consumer (%@)"
00086 " and dispatch task in map (%s): %p\n",
00087 consumer, explanation));
00088 dtask->putq (new TAO_EC_Shutdown_Task_Command);
00089 dtask->wait ();
00090 delete dtask;
00091 return -1;
00092 }
00093
00094 return 0;
00095 }
|
|
||||||||||||||||||||
|
The consumer represented by proxy should receive event. It can use the information in qos_info to determine the event priority (among other things). Implements TAO_EC_Dispatching. Definition at line 168 of file EC_TPC_Dispatching.cpp. References RtecEventComm::EventSet, and push_nocopy().
00172 {
00173 RtecEventComm::EventSet event_copy = event;
00174 this->push_nocopy (proxy, consumer, event_copy, qos_info);
00175 }
|
|
||||||||||||||||||||
|
Implements TAO_EC_Dispatching. Definition at line 178 of file EC_TPC_Dispatching.cpp. References ACE_DEBUG, ACE_GUARD, ACE_SYNCH_MUTEX, consumer_task_map_, RtecEventComm::EventSet, ACE_Hash_Map_Manager_Ex< EXT_ID, INT_ID, HASH_KEY, COMPARE_KEYS, ACE_LOCK >::find(), LM_DEBUG, LM_WARNING, TAO_EC_Dispatching_Task::push(), and TAO_EC_TPC_debug_level. Referenced by push().
00182 {
00183 if (TAO_EC_TPC_debug_level > 0)
00184 ACE_DEBUG ((LM_DEBUG, "EC (%P|%t) TPC_Dispatching::push_nocopy(supplier=%@,consumer=%@)\n", proxy, consumer));
00185
00186 ACE_GUARD (ACE_SYNCH_MUTEX, ace_mon, this->lock_);
00187 TAO_EC_Dispatching_Task* dtask;
00188
00189 if (this->consumer_task_map_.find (consumer, dtask) == -1)
00190 {
00191 ACE_DEBUG ((LM_WARNING,
00192 "EC (%P|%t): TPC_Dispatching::push_nocopy failed to"
00193 " find consumer (%@) in map\n", consumer));
00194 }
00195 else
00196 {
00197 dtask->push (proxy, consumer, event);
00198 }
00199 }
|
|
|
Definition at line 98 of file EC_TPC_Dispatching.cpp. References ACE_DEBUG, ACE_GUARD_RETURN, ACE_SYNCH_MUTEX, consumer_task_map_, ACE_Hash_Map_Manager_Ex< EXT_ID, INT_ID, HASH_KEY, COMPARE_KEYS, ACE_LOCK >::find(), LM_WARNING, ACE_Task< ACE_SYNCH >::putq(), CORBA::release(), and ACE_Hash_Map_Manager_Ex< EXT_ID, INT_ID, HASH_KEY, COMPARE_KEYS, ACE_LOCK >::unbind(). Referenced by TAO_EC_TPC_ProxyPushConsumer::disconnect_push_consumer(), and TAO_EC_TPC_ProxyPushSupplier::disconnect_push_supplier().
00099 {
00100 ACE_GUARD_RETURN (ACE_SYNCH_MUTEX, ace_mon, this->lock_, -1);
00101
00102 TAO_EC_Dispatching_Task* dtask = 0;
00103
00104 if (this->consumer_task_map_.find (consumer, dtask) == -1)
00105 {
00106 ACE_DEBUG ((LM_WARNING,
00107 "EC (%P|%t): TPC_Dispatching::remove_consumer failed to"
00108 " find consumer (%@) in map\n", consumer));
00109 return -1;
00110 }
00111
00112 // Must have found it...first try to unbind
00113 if (this->consumer_task_map_.unbind (consumer) == -1)
00114 {
00115 ACE_DEBUG ((LM_WARNING,
00116 "EC (%P|%t): TPC_Dispatching::remove_consumer failed to"
00117 " unbind consumer (%@) and task in map\n", consumer));
00118 return -1;
00119 }
00120
00121 dtask->putq (new TAO_EC_Shutdown_Task_Command);
00122 CORBA::release (consumer); // This matches the _duplicate in add_consumer
00123 return 0;
00124 }
|
|
|
Deactivate any internal threads and cleanup internal data structures, it should only return once the threads have finished their jobs. Implements TAO_EC_Dispatching. Definition at line 132 of file EC_TPC_Dispatching.cpp. References ACE_GUARD, ACE_SYNCH_MUTEX, ACE_Hash_Map_Manager_Ex< EXT_ID, INT_ID, HASH_KEY, COMPARE_KEYS, ACE_LOCK >::begin(), consumer_task_map_, CORBA::release(), ACE_Hash_Map_Manager_Ex< EXT_ID, INT_ID, HASH_KEY, COMPARE_KEYS, ACE_LOCK >::unbind_all(), and ACE_Thread_Manager::wait().
00133 {
00134 ACE_GUARD (ACE_SYNCH_MUTEX, ace_mon, this->lock_);
00135
00136 // The MT_Dispatching strategy sends a TAO_EC_Shutdown_Task_Command
00137 // to the dispatching task. Is that what we should do here?
00138 MAPTYPE::ITERATOR iter = this->consumer_task_map_.begin ();
00139 while (! iter.done())
00140 {
00141 MAPTYPE::ENTRY* entry = 0;
00142 if (! iter.next(entry))
00143 continue;
00144
00145 entry->int_id_->putq (new TAO_EC_Shutdown_Task_Command);
00146 iter.advance ();
00147 }
00148
00149 this->thread_manager_.wait (); // Wait for the threads to terminate
00150
00151 // Now iterate again and call CORBA::release on the ext_id;
00152 // we don't have to delete int_id_ b/c that happens in its close() method.
00153 iter = this->consumer_task_map_.begin ();
00154 while (! iter.done())
00155 {
00156 MAPTYPE::ENTRY* entry = 0;
00157 if (! iter.next(entry))
00158 continue;
00159
00160 CORBA::release (entry->ext_id_);
00161 iter.advance ();
00162 }
00163
00164 this->consumer_task_map_.unbind_all ();
00165 }
|
|
|
Definition at line 86 of file EC_TPC_Dispatching.h. Referenced by add_consumer(), push_nocopy(), remove_consumer(), and shutdown(). |
|
|
If activation at the requested priority fails then we fallback on the defaults for thread activation. Definition at line 80 of file EC_TPC_Dispatching.h. |
|
|
Definition at line 91 of file EC_TPC_Dispatching.h. |
|
|
The number of active tasks.
Definition at line 69 of file EC_TPC_Dispatching.h. |
|
|
Definition at line 94 of file EC_TPC_Dispatching.h. |
|
|
The flags (THR_BOUND, THR_NEW_LWP, etc.) used to create the dispatching threads. Definition at line 73 of file EC_TPC_Dispatching.h. |
|
|
Definition at line 66 of file EC_TPC_Dispatching.h. |
|
|
The priority of the dispatching threads.
Definition at line 76 of file EC_TPC_Dispatching.h. |
 1.3.6
1.3.6