#include <EC_ObserverStrategy.h>
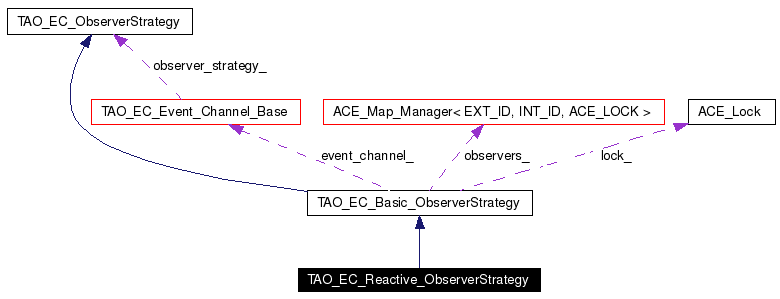
Inheritance diagram for TAO_EC_Reactive_ObserverStrategy:
Public Member Functions | |
| TAO_EC_Reactive_ObserverStrategy (TAO_EC_Event_Channel_Base *ec, ACE_Lock *lock) | |
| Constructor. | |
| virtual | ~TAO_EC_Reactive_ObserverStrategy (void) |
| Destructor. | |
Protected Member Functions | |
| virtual void | consumer_qos_update (TAO_EC_ProxyPushSupplier *supplier) |
| Recompute EC consumer subscriptions and send them out to all observers. | |
| virtual void | supplier_qos_update (TAO_EC_ProxyPushConsumer *consumer) |
| Recompute EC supplier publications and send them out to all observers. | |
| int | create_observer_map (Observer_Map &map) |
| void | observer_not_exists (Observer_Entry &observer) |
| The observer doesn't exist anymore. | |
This class simply keeps the information about the current list of observers, whenever the list of consumers and/or suppliers changes in queries the EC, computes the global subscription and/or publication list and sends the update message to all the observers. When an observer isn't reachable it is removed from the observer list.
It assumes ownership of the , but not of the Event_Channel.
Definition at line 286 of file EC_ObserverStrategy.h.
|
||||||||||||
|
Constructor.
Definition at line 57 of file EC_ObserverStrategy.i.
00059 : TAO_EC_Basic_ObserverStrategy (ec, lock) 00060 { 00061 } |
|
|
Destructor.
Definition at line 328 of file EC_ObserverStrategy.cpp.
00329 {
00330 }
|
|
|
Recompute EC consumer subscriptions and send them out to all observers.
Reimplemented from TAO_EC_Basic_ObserverStrategy. Definition at line 382 of file EC_ObserverStrategy.cpp. References ACE_CATCH, ACE_CATCHANY, ACE_CHECK, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_TRY, ACE_TRY_CHECK, create_observer_map(), TAO_EC_Basic_ObserverStrategy::fill_qos(), and observer_not_exists().
00385 {
00386 if (supplier->subscriptions ().is_gateway)
00387 return;
00388
00389 RtecEventChannelAdmin::ConsumerQOS c_qos;
00390 this->fill_qos (c_qos ACE_ENV_ARG_PARAMETER);
00391 ACE_CHECK;
00392
00393 Observer_Map copy;
00394 this->create_observer_map (copy ACE_ENV_ARG_PARAMETER);
00395 ACE_CHECK;
00396
00397 Observer_Map_Iterator end = copy.end ();
00398 for (Observer_Map_Iterator i = copy.begin ();
00399 i != end;
00400 ++i)
00401 {
00402 Observer_Entry& entry = (*i).int_id_;
00403 ACE_TRY
00404 {
00405 entry.observer->update_consumer (c_qos ACE_ENV_ARG_PARAMETER);
00406 ACE_TRY_CHECK;
00407 }
00408 ACE_CATCH (CORBA::OBJECT_NOT_EXIST, ex)
00409 {
00410 // Exception occured while updating observer, so remove it from the
00411 // observer list
00412 this->observer_not_exists (entry ACE_ENV_ARG_PARAMETER);
00413 ACE_TRY_CHECK;
00414 }
00415 ACE_CATCH (CORBA::TRANSIENT, transient)
00416 {
00417 // Exception occured while updating observer, so remove it from the
00418 // observer list
00419 this->observer_not_exists (entry ACE_ENV_ARG_PARAMETER);
00420 ACE_TRY_CHECK;
00421 }
00422 ACE_CATCHANY
00423 {
00424 // Ignore all exceptions
00425 }
00426 ACE_ENDTRY;
00427 }
00428 }
|
|
|
Copies all current observers into a map and passes it back to the caller through map.
Definition at line 431 of file EC_ObserverStrategy.cpp. References ACE_CHECK_RETURN, and ACE_GUARD_THROW_EX. Referenced by consumer_qos_update(), and supplier_qos_update().
00433 {
00434 ACE_GUARD_THROW_EX (ACE_Lock, ace_mon, *this->lock_,
00435 RtecEventChannelAdmin::EventChannel::SYNCHRONIZATION_ERROR());
00436 ACE_CHECK_RETURN (0);
00437
00438 Observer_Map_Iterator end = this->observers_.end ();
00439 for (Observer_Map_Iterator i = this->observers_.begin ();
00440 i != end;
00441 ++i)
00442 {
00443 Observer_Entry& entry = (*i).int_id_;
00444 Observer_Entry copy (entry.handle,
00445 RtecEventChannelAdmin::Observer::_duplicate (entry.observer.in ()));
00446 if (map.bind (copy.handle, copy) == -1)
00447 {
00448 map.unbind_all();
00449 return 0;
00450 }
00451 }
00452
00453 return map.current_size();
00454 }
|
|
|
The observer doesn't exist anymore.
Definition at line 457 of file EC_ObserverStrategy.cpp. References ACE_CATCHANY, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_TRY, ACE_TRY_CHECK, and TAO_EC_Basic_ObserverStrategy::remove_observer(). Referenced by consumer_qos_update(), and supplier_qos_update().
00459 {
00460 ACE_TRY
00461 {
00462 this->remove_observer(observer.handle ACE_ENV_ARG_PARAMETER);
00463 ACE_TRY_CHECK;
00464 }
00465 ACE_CATCHANY
00466 {
00467 // Ignore exceptions
00468 }
00469 ACE_ENDTRY;
00470 }
|
|
|
Recompute EC supplier publications and send them out to all observers.
Reimplemented from TAO_EC_Basic_ObserverStrategy. Definition at line 333 of file EC_ObserverStrategy.cpp. References ACE_CATCH, ACE_CATCHANY, ACE_CHECK, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_TRY, ACE_TRY_CHECK, create_observer_map(), TAO_EC_Basic_ObserverStrategy::fill_qos(), and observer_not_exists().
00336 {
00337 if (consumer->publications ().is_gateway)
00338 return;
00339
00340 RtecEventChannelAdmin::SupplierQOS s_qos;
00341 this->fill_qos (s_qos ACE_ENV_ARG_PARAMETER);
00342 ACE_CHECK;
00343
00344 Observer_Map copy;
00345 this->create_observer_map (copy ACE_ENV_ARG_PARAMETER);
00346 ACE_CHECK;
00347
00348 Observer_Map_Iterator end = copy.end ();
00349 for (Observer_Map_Iterator i = copy.begin ();
00350 i != end;
00351 ++i)
00352 {
00353 Observer_Entry& entry = (*i).int_id_;
00354 ACE_TRY
00355 {
00356 entry.observer->update_supplier (s_qos ACE_ENV_ARG_PARAMETER);
00357 ACE_TRY_CHECK;
00358 }
00359 ACE_CATCH (CORBA::OBJECT_NOT_EXIST, ex)
00360 {
00361 // Exception occured while updating observer, so remove it from the
00362 // observer list
00363 this->observer_not_exists (entry ACE_ENV_ARG_PARAMETER);
00364 ACE_TRY_CHECK;
00365 }
00366 ACE_CATCH (CORBA::TRANSIENT, transient)
00367 {
00368 // Exception occured while updating observer, so remove it from the
00369 // observer list
00370 this->observer_not_exists (entry ACE_ENV_ARG_PARAMETER);
00371 ACE_TRY_CHECK;
00372 }
00373 ACE_CATCHANY
00374 {
00375 // Ignore all exceptions
00376 }
00377 ACE_ENDTRY;
00378 }
00379 }
|
 1.3.6
1.3.6