#include <RT_ORBInitializer.h>
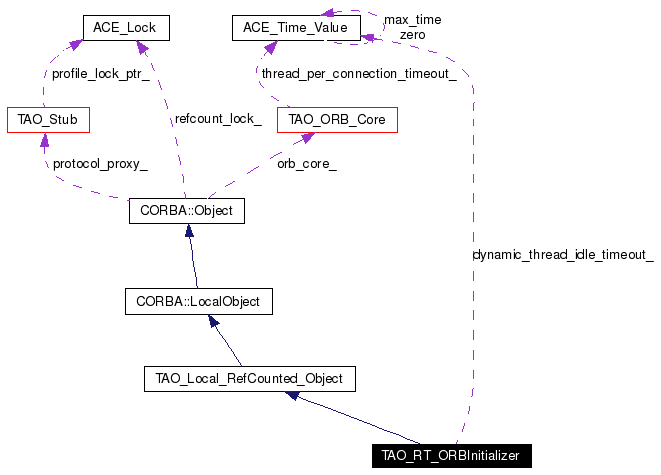
Inheritance diagram for TAO_RT_ORBInitializer:
Public Types | |
| enum | { TAO_PRIORITY_MAPPING_CONTINUOUS, TAO_PRIORITY_MAPPING_LINEAR, TAO_PRIORITY_MAPPING_DIRECT } |
| Priority mapping types. More... | |
| enum | { TAO_NETWORK_PRIORITY_MAPPING_LINEAR } |
Public Member Functions | |
| TAO_RT_ORBInitializer (int priority_mapping_type, int network_priority_mapping_type, int ace_sched_policy, long sched_policy, long scope_policy, ACE_Time_Value const &dynamic_thread_idle_timeout) | |
| virtual void | pre_init (PortableInterceptor::ORBInitInfo_ptr info) throw (CORBA::SystemException) |
| virtual void | post_init (PortableInterceptor::ORBInitInfo_ptr info) throw (CORBA::SystemException) |
Private Member Functions | |
| void | register_policy_factories (PortableInterceptor::ORBInitInfo_ptr info) |
| Register RTCORBA policy factories. | |
Private Attributes | |
| PortableInterceptor::PolicyFactory_var | policy_factory_ |
| Instance of the RTCorba policy factory. | |
| int const | priority_mapping_type_ |
| Priority mapping type. | |
| int const | network_priority_mapping_type_ |
| Network Priority mapping type. | |
| int const | ace_sched_policy_ |
| Scheduling policy. | |
| long const | sched_policy_ |
| Scheduling policy flag. | |
| long const | scope_policy_ |
| Scheduling scope flag. | |
| ACE_Time_Value const | dynamic_thread_idle_timeout_ |
| Dynamic thread idle timeout. | |
Definition at line 43 of file RT_ORBInitializer.h.
|
|
Priority mapping types.
Definition at line 49 of file RT_ORBInitializer.h.
00050 {
00051 TAO_PRIORITY_MAPPING_CONTINUOUS,
00052 TAO_PRIORITY_MAPPING_LINEAR,
00053 TAO_PRIORITY_MAPPING_DIRECT
00054 };
|
|
|
Definition at line 56 of file RT_ORBInitializer.h.
00057 {
00058 TAO_NETWORK_PRIORITY_MAPPING_LINEAR
00059 };
|
|
||||||||||||||||||||||||||||
|
Definition at line 49 of file RT_ORBInitializer.cpp.
00055 : priority_mapping_type_ (priority_mapping_type), 00056 network_priority_mapping_type_ (network_priority_mapping_type), 00057 ace_sched_policy_ (ace_sched_policy), 00058 sched_policy_ (sched_policy), 00059 scope_policy_ (scope_policy), 00060 dynamic_thread_idle_timeout_ (dynamic_thread_idle_timeout) 00061 { 00062 } |
|
|
Definition at line 228 of file RT_ORBInitializer.cpp. References ACE_CHECK, and ACE_ENV_ARG_PARAMETER.
00232 {
00233 this->register_policy_factories (info
00234 ACE_ENV_ARG_PARAMETER);
00235
00236 ACE_CHECK;
00237 }
|
|
|
Definition at line 65 of file RT_ORBInitializer.cpp. References CORBA::Object::_nil(), ACE_CHECK, ACE_ENV_ARG_PARAMETER, ACE_ERROR, ACE_NEW, ACE_NEW_THROW_EX, ACE_TEXT_ALWAYS_CHAR, ACE_THROW, CORBA::is_nil(), LM_ERROR, ACE_Service_Config::process_directive(), rt_poa_factory_directive, rt_poa_factory_name, TAO_ORB_Core::set_endpoint_selector_factory(), TAO_ORB_Core::set_poa_factory(), TAO_ORB_Core::set_protocols_hooks(), TAO_ORB_Core::set_stub_factory(), TAO_ORB_Core::set_thread_lane_resources_manager_factory(), TAO_debug_level, TAO_OBJID_RTCURRENT, and TAO_OBJID_RTORB.
00069 {
00070 //
00071 // Register all of the RT related services.
00072 //
00073
00074 // Set the name of the Protocol_Hooks to be RT_Protocols_Hooks.
00075 TAO_ORB_Core::set_protocols_hooks ("RT_Protocols_Hooks");
00076 ACE_Service_Config::process_directive (ace_svc_desc_TAO_RT_Protocols_Hooks);
00077
00078 // Set the name of the stub factory to be RT_Stub_Factory.
00079 TAO_ORB_Core::set_stub_factory ("RT_Stub_Factory");
00080 ACE_Service_Config::process_directive (ace_svc_desc_TAO_RT_Stub_Factory);
00081
00082 // Set the name of the stub factory to be RT_Stub_Factory.
00083 TAO_ORB_Core::set_endpoint_selector_factory ("RT_Endpoint_Selector_Factory");
00084 ACE_Service_Config::process_directive (ace_svc_desc_RT_Endpoint_Selector_Factory);
00085
00086 // Set the name of the thread lane resources manager to be RT_Thread_Lane_Resources_Manager.
00087 TAO_ORB_Core::set_thread_lane_resources_manager_factory ("RT_Thread_Lane_Resources_Manager_Factory");
00088 ACE_Service_Config::process_directive (ace_svc_desc_TAO_RT_Thread_Lane_Resources_Manager_Factory);
00089
00090 // If the application resolves the root POA, make sure we load the RT POA.
00091 TAO_ORB_Core::set_poa_factory (rt_poa_factory_name,
00092 ACE_TEXT_ALWAYS_CHAR (rt_poa_factory_directive));
00093
00094 // Create the initial priority mapping instance.
00095 TAO_Priority_Mapping *pm = 0;
00096 switch (this->priority_mapping_type_)
00097 {
00098 case TAO_PRIORITY_MAPPING_CONTINUOUS:
00099 ACE_NEW (pm,
00100 TAO_Continuous_Priority_Mapping (this->ace_sched_policy_));
00101 break;
00102 case TAO_PRIORITY_MAPPING_LINEAR:
00103 ACE_NEW (pm,
00104 TAO_Linear_Priority_Mapping (this->ace_sched_policy_));
00105 break;
00106 default:
00107 case TAO_PRIORITY_MAPPING_DIRECT:
00108 ACE_NEW (pm,
00109 TAO_Direct_Priority_Mapping (this->ace_sched_policy_));
00110 break;
00111 }
00112
00113 // Set the Priority_Mapping_Manager
00114 TAO_Priority_Mapping_Manager *manager = 0;
00115
00116 ACE_NEW_THROW_EX (manager,
00117 TAO_Priority_Mapping_Manager (pm),
00118 CORBA::NO_MEMORY (
00119 CORBA::SystemException::_tao_minor_code (
00120 TAO::VMCID,
00121 ENOMEM),
00122 CORBA::COMPLETED_NO));
00123 ACE_CHECK;
00124
00125 TAO_Priority_Mapping_Manager_var safe_manager = manager;
00126
00127 info->register_initial_reference ("PriorityMappingManager",
00128 manager
00129 ACE_ENV_ARG_PARAMETER);
00130 ACE_CHECK;
00131
00132 // Create the initial priority mapping instance.
00133 TAO_Network_Priority_Mapping *npm = 0;
00134 switch (this->network_priority_mapping_type_)
00135 {
00136 default:
00137 case TAO_NETWORK_PRIORITY_MAPPING_LINEAR:
00138 ACE_NEW (npm,
00139 TAO_Linear_Network_Priority_Mapping (this->ace_sched_policy_));
00140 break;
00141 }
00142
00143 // Set the Priority_Mapping_Manager
00144 TAO_Network_Priority_Mapping_Manager * network_manager = 0;
00145
00146 // @@ There is a potential memory leak here. If the new() below
00147 // throws an exception, the memory for the network priority
00148 // mapping allocated above will be leaked. Use an auto_ptr<> or
00149 // the appropriate memory management tool.
00150
00151 ACE_NEW_THROW_EX (network_manager,
00152 TAO_Network_Priority_Mapping_Manager (npm),
00153 CORBA::NO_MEMORY (
00154 CORBA::SystemException::_tao_minor_code (
00155 TAO::VMCID,
00156 ENOMEM),
00157 CORBA::COMPLETED_NO));
00158 ACE_CHECK;
00159
00160 TAO_Network_Priority_Mapping_Manager_var safe_network_manager =
00161 network_manager;
00162
00163 info->register_initial_reference ("NetworkPriorityMappingManager",
00164 network_manager
00165 ACE_ENV_ARG_PARAMETER);
00166 ACE_CHECK;
00167
00168 // Narrow to a TAO_ORBInitInfo object to get access to the
00169 // orb_core() TAO extension.
00170 TAO_ORBInitInfo_var tao_info =
00171 TAO_ORBInitInfo::_narrow (info
00172 ACE_ENV_ARG_PARAMETER);
00173 ACE_CHECK;
00174
00175 if (CORBA::is_nil (tao_info.in ()))
00176 {
00177 if (TAO_debug_level > 0)
00178 ACE_ERROR ((LM_ERROR,
00179 "(%P|%t) TAO_RT_ORBInitializer::pre_init:\n"
00180 "(%P|%t) Unable to narrow "
00181 "\"PortableInterceptor::ORBInitInfo_ptr\" to\n"
00182 "(%P|%t) \"TAO_ORBInitInfo *.\"\n"));
00183
00184 ACE_THROW (CORBA::INTERNAL ());
00185 }
00186
00187 // Create the RT_ORB.
00188 CORBA::Object_ptr rt_orb = CORBA::Object::_nil ();
00189 ACE_NEW_THROW_EX (rt_orb,
00190 TAO_RT_ORB (tao_info->orb_core (),
00191 dynamic_thread_idle_timeout_),
00192 CORBA::NO_MEMORY (
00193 CORBA::SystemException::_tao_minor_code (
00194 TAO::VMCID,
00195 ENOMEM),
00196 CORBA::COMPLETED_NO));
00197 ACE_CHECK;
00198 CORBA::Object_var safe_rt_orb = rt_orb;
00199
00200 info->register_initial_reference (TAO_OBJID_RTORB,
00201 rt_orb
00202 ACE_ENV_ARG_PARAMETER);
00203 ACE_CHECK;
00204
00205 // Create the RT_Current.
00206 CORBA::Object_ptr current = CORBA::Object::_nil ();
00207 ACE_NEW_THROW_EX (current,
00208 TAO_RT_Current (tao_info->orb_core ()),
00209 CORBA::NO_MEMORY (
00210 CORBA::SystemException::_tao_minor_code (
00211 TAO::VMCID,
00212 ENOMEM),
00213 CORBA::COMPLETED_NO));
00214 ACE_CHECK;
00215 CORBA::Object_var safe_rt_current = current;
00216
00217 info->register_initial_reference (TAO_OBJID_RTCURRENT,
00218 current
00219 ACE_ENV_ARG_PARAMETER);
00220 ACE_CHECK;
00221
00222 tao_info->orb_core ()->orb_params ()->scope_policy (this->scope_policy_);
00223 tao_info->orb_core ()->orb_params ()->sched_policy (this->sched_policy_);
00224 tao_info->orb_core ()->orb_params ()->ace_sched_policy (this->ace_sched_policy_);
00225 }
|
|
|
Register RTCORBA policy factories.
Definition at line 240 of file RT_ORBInitializer.cpp. References ACE_CATCH, ACE_CATCHANY, ACE_CHECK, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_NEW_THROW_EX, ACE_RE_THROW, ACE_TRY, ACE_TRY_CHECK, CORBA::is_nil(), and policy_factory_.
00243 {
00244 // The RTCorba policy factory is stateless and reentrant, so share a
00245 // single instance between all ORBs.
00246 if (CORBA::is_nil (this->policy_factory_.in ()))
00247 {
00248 PortableInterceptor::PolicyFactory_ptr policy_factory;
00249 ACE_NEW_THROW_EX (policy_factory,
00250 TAO_RT_PolicyFactory,
00251 CORBA::NO_MEMORY (
00252 CORBA::SystemException::_tao_minor_code (
00253 TAO::VMCID,
00254 ENOMEM),
00255 CORBA::COMPLETED_NO));
00256 ACE_CHECK;
00257
00258 this->policy_factory_ = policy_factory;
00259 }
00260
00261 // Bind the same policy factory to all RTCORBA related policy
00262 // types since a single policy factory is used to create each of
00263 // the different types of RTCORBA policies.
00264 static CORBA::PolicyType const type[] = {
00265 RTCORBA::PRIORITY_MODEL_POLICY_TYPE,
00266 RTCORBA::THREADPOOL_POLICY_TYPE,
00267 RTCORBA::SERVER_PROTOCOL_POLICY_TYPE,
00268 RTCORBA::CLIENT_PROTOCOL_POLICY_TYPE,
00269 RTCORBA::PRIVATE_CONNECTION_POLICY_TYPE,
00270 RTCORBA::PRIORITY_BANDED_CONNECTION_POLICY_TYPE
00271 };
00272
00273 const CORBA::PolicyType *end =
00274 type + sizeof (type) / sizeof (type[0]);
00275
00276 for (CORBA::PolicyType const * i = type;
00277 i != end;
00278 ++i)
00279 {
00280 ACE_TRY
00281 {
00282 info->register_policy_factory (*i,
00283 this->policy_factory_.in ()
00284 ACE_ENV_ARG_PARAMETER);
00285 ACE_TRY_CHECK;
00286 }
00287 ACE_CATCH (CORBA::BAD_INV_ORDER, ex)
00288 {
00289 if (ex.minor () == (CORBA::OMGVMCID | 16))
00290 {
00291 // The factory is already there, it happens because the
00292 // magic initializer in PortableServer.cpp registers
00293 // with the ORB multiple times. This is an indication
00294 // that we should do no more work in this
00295 // ORBInitializer.
00296 return;
00297 }
00298 ACE_RE_THROW;
00299 }
00300 ACE_CATCHANY
00301 {
00302 // Rethrow any other exceptions...
00303 ACE_RE_THROW;
00304 }
00305 ACE_ENDTRY;
00306 ACE_CHECK;
00307 }
00308 }
|
|
|
Scheduling policy. Scheduling policy specified by the user through the -ORBSchedPolicy option. This value is typically used by functions like ACE_OS::thr_setprio() and ACE_Sched_Params::priority_min(). Legal values are ACE_SCHED_RR, ACE_SCHED_FIFO, and ACE_SCHED_OTHER. Definition at line 105 of file RT_ORBInitializer.h. |
|
|
Dynamic thread idle timeout. When using thread pool a certain number of dynamic threads can be created. By default these threads are created when needed but never end, when this timeout is specified the threads end themselves at the moment they have not been serving any requests for the specified amount of time Definition at line 132 of file RT_ORBInitializer.h. |
|
|
Network Priority mapping type.
Definition at line 95 of file RT_ORBInitializer.h. |
|
|
Instance of the RTCorba policy factory. The RTCorba policy factory is stateless and reentrant, so share a single instance between all ORBs. Definition at line 89 of file RT_ORBInitializer.h. Referenced by register_policy_factories(). |
|
|
Priority mapping type.
Definition at line 92 of file RT_ORBInitializer.h. |
|
|
Scheduling policy flag. Scheduling policy specified by the user through the -ORBSchedPolicy option. This value is typically used by ACE thread creation functions. Legal values are THR_SCHED_RR, THR_SCHED_FIFO, and THR_SCHED_DEFAULT. Definition at line 114 of file RT_ORBInitializer.h. |
|
|
Scheduling scope flag. Scheduling policy specified by the user through the -ORBScopePolicy option. This value is typically used by ACE thread creation functions. Legal values are THR_SCOPE_SYSTEM and THR_SCOPE_PROCESS. Definition at line 123 of file RT_ORBInitializer.h. |
 1.3.6
1.3.6