#include <Locator_Loader.h>
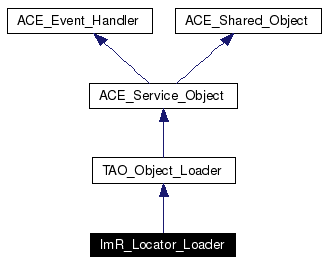
Inheritance diagram for ImR_Locator_Loader:

Public Member Functions | |
| ImR_Locator_Loader () | |
| virtual int | init (int argc, ACE_TCHAR *argv[]) |
| virtual int | fini (void) |
| virtual CORBA::Object_ptr | create_object (CORBA::ORB_ptr orb, int argc, ACE_TCHAR *argv[]) throw (CORBA::SystemException) |
| int | run (void) |
Private Member Functions | |
| ImR_Locator_Loader (const ImR_Locator_Loader &) | |
| ImR_Locator_Loader & | operator= (const ImR_Locator_Loader &) |
Private Attributes | |
| ImR_Locator_i | service_ |
| Options | opts_ |
| ACE_Auto_Ptr< ImR_Locator_ORB_Runner > | runner_ |
|
|
Definition at line 24 of file Locator_Loader.cpp.
00025 {
00026 }
|
|
|
|
|
||||||||||||||||
|
Implements TAO_Object_Loader. |
|
|
Reimplemented from ACE_Shared_Object. Definition at line 57 of file Locator_Loader.cpp. References ACE_ASSERT, ACE_CATCHANY, ACE_DECLARE_NEW_CORBA_ENV, ACE_ENDTRY, ACE_ENV_SINGLE_ARG_PARAMETER, ACE_TRY, ACE_TRY_CHECK, ImR_Locator_i::fini(), and ACE_Auto_Basic_Ptr< X >::reset().
00058 {
00059 ACE_ASSERT(this->runner_.get () != 0);
00060 ACE_DECLARE_NEW_CORBA_ENV;
00061 ACE_TRY
00062 {
00063 int ret = this->service_.fini (ACE_ENV_SINGLE_ARG_PARAMETER);
00064 ACE_TRY_CHECK;
00065
00066 this->runner_->wait ();
00067 this->runner_.reset (0);
00068 return ret;
00069 }
00070 ACE_CATCHANY
00071 {
00072 }
00073 ACE_ENDTRY;
00074 return -1;
00075 }
|
|
||||||||||||
|
Reimplemented from ACE_Shared_Object. Definition at line 29 of file Locator_Loader.cpp. References ACE_ASSERT, ACE_CATCHANY, ACE_DECLARE_NEW_CORBA_ENV, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_TRY, ACE_TRY_CHECK, ImR_Locator_i::init(), Options::init(), and ACE_Auto_Basic_Ptr< X >::reset().
00030 {
00031 ACE_DECLARE_NEW_CORBA_ENV;
00032 ACE_TRY
00033 {
00034 int err = this->opts_.init (argc, argv);
00035 if (err != 0)
00036 return -1;
00037
00038 err = this->service_.init (this->opts_ ACE_ENV_ARG_PARAMETER);
00039 ACE_TRY_CHECK;
00040 if (err != 0)
00041 return -1;
00042
00043 // Create a thread in which to run the service
00044 ACE_ASSERT(this->runner_.get () == 0);
00045 this->runner_.reset(new ImR_Locator_ORB_Runner (*this));
00046 this->runner_->activate ();
00047 }
00048 ACE_CATCHANY
00049 {
00050 return -1;
00051 }
00052 ACE_ENDTRY;
00053 return 0;
00054 }
|
|
|
|
|
|
Definition at line 88 of file Locator_Loader.cpp. References ACE_CATCHALL, ACE_DECLARE_NEW_CORBA_ENV, ACE_ENDTRY, ACE_ENV_SINGLE_ARG_PARAMETER, ACE_ERROR, ACE_TRY, ACE_TRY_CHECK, LM_ERROR, and ImR_Locator_i::run(). Referenced by ImR_Locator_ORB_Runner::svc().
00089 {
00090 ACE_DECLARE_NEW_CORBA_ENV;
00091 ACE_TRY
00092 {
00093 return this->service_.run (ACE_ENV_SINGLE_ARG_PARAMETER);
00094 ACE_TRY_CHECK;
00095 }
00096 ACE_CATCHALL
00097 {
00098 ACE_ERROR((LM_ERROR, "Exception in ImR_Locator_ORB_Runner ()\n"));
00099 return -1;
00100 }
00101 ACE_ENDTRY;
00102 }
|
|
|
Definition at line 40 of file Locator_Loader.h. |
|
|
Definition at line 41 of file Locator_Loader.h. |
|
|
Definition at line 39 of file Locator_Loader.h. |
 1.3.6
1.3.6