
#include <Asynch_IO.h>
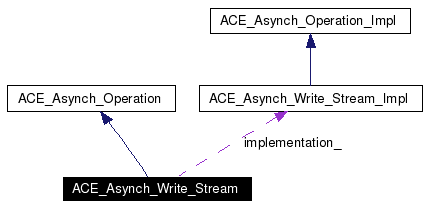
Inheritance diagram for ACE_Asynch_Write_Stream:
Public Member Functions | |
| ACE_Asynch_Write_Stream (void) | |
| A do nothing constructor. | |
| virtual | ~ACE_Asynch_Write_Stream (void) |
| Destructor. | |
| int | open (ACE_Handler &handler, ACE_HANDLE handle=ACE_INVALID_HANDLE, const void *completion_key=0, ACE_Proactor *proactor=0) |
| int | write (ACE_Message_Block &message_block, size_t bytes_to_write, const void *act=0, int priority=0, int signal_number=ACE_SIGRTMIN) |
| virtual ACE_Asynch_Operation_Impl * | implementation (void) const |
Protected Attributes | |
| ACE_Asynch_Write_Stream_Impl * | implementation_ |
| Implementation class that all methods will be forwarded to. | |
Once {open} is called, multiple asynchronous {writes}s can started using this class. An ACE_Asynch_Write_Stream::Result will be passed back to the {handler} when the asynchronous write completes through the {ACE_Handler::handle_write_stream} callback.
Definition at line 424 of file Asynch_IO.h.
|
|
A do nothing constructor.
Definition at line 252 of file Asynch_IO.cpp.
00253 : implementation_ (0) 00254 { 00255 } |
|
|
Destructor.
Definition at line 257 of file Asynch_IO.cpp.
00258 {
00259 // Delete the implementation.
00260 delete this->implementation_;
00261 this->implementation_ = 0;
00262 }
|
|
|
Return the underlying implementation class.
Implements ACE_Asynch_Operation. Reimplemented in ACE_Asynch_Write_File. Definition at line 315 of file Asynch_IO.cpp.
00316 {
00317 return this->implementation_;
00318 }
|
|
||||||||||||||||||||
|
Initializes the factory with information which will be used with each asynchronous call. If ({handle} == ACE_INVALID_HANDLE), {ACE_Handler::handle} will be called on the {handler} to get the correct handle. Reimplemented from ACE_Asynch_Operation. Reimplemented in ACE_Asynch_Write_File. Definition at line 265 of file Asynch_IO.cpp. References ACE_Proactor::create_asynch_write_stream(), ACE_Asynch_Operation::get_proactor(), and ACE_Asynch_Operation::open().
00269 {
00270 // Get a proactor for/from the user.
00271 proactor = this->get_proactor (proactor, handler);
00272
00273 // Now let us get the implementation initialized.
00274 if ((this->implementation_ = proactor->create_asynch_write_stream ()) == 0)
00275 return -1;
00276
00277 // Call the <open> method of the base class.
00278 return ACE_Asynch_Operation::open (handler,
00279 handle,
00280 completion_key,
00281 proactor);
00282 }
|
|
||||||||||||||||||||||||
|
This starts off an asynchronous write. Upto {bytes_to_write} will be written from the {message_block}. Upon successful completion of the write operation, {message_block}'s {rd_ptr} is updated to reflect the data that was written. Priority of the operation is specified by {priority}. On POSIX4-Unix, this is supported. Works like {nice} in Unix. Negative values are not allowed. 0 means priority of the operation same as the process priority. 1 means priority of the operation is one less than process. And so forth. On Win32, this argument is a no-op. {signal_number} is the POSIX4 real-time signal number to be used for the operation. {signal_number} ranges from ACE_SIGRTMIN to ACE_SIGRTMAX. This argument is a no-op on non-POSIX4 systems. Definition at line 285 of file Asynch_IO.cpp. References ACE_Asynch_Write_Stream_Impl::write().
00290 {
00291 return this->implementation_->write (message_block,
00292 bytes_to_write,
00293 act,
00294 priority,
00295 signal_number);
00296 }
|
|
|
Implementation class that all methods will be forwarded to.
Reimplemented in ACE_Asynch_Write_File. Definition at line 483 of file Asynch_IO.h. |
 1.3.6
1.3.6