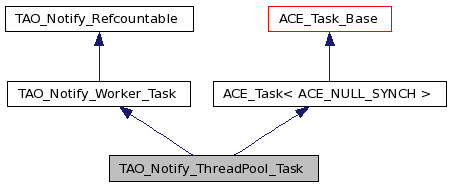
Implements a Thread Pool Worker Task. More...
#include <ThreadPool_Task.h>

Public Member Functions | |
| TAO_Notify_ThreadPool_Task (void) | |
| Constructor. | |
| virtual | ~TAO_Notify_ThreadPool_Task () |
| Destructor. | |
| virtual int | init (int argc, ACE_TCHAR **argv) |
| Call the base class init. | |
| virtual int | close (u_long flags) |
| release reference to my self. | |
| void | init (const NotifyExt::ThreadPoolParams &tp_params, const TAO_Notify_AdminProperties::Ptr &admin_properties) |
| Activate the threadpool. | |
| virtual void | execute (TAO_Notify_Method_Request &method_request) |
| Queue the request. | |
| virtual void | shutdown () |
| Shutdown task. | |
| virtual void | update_qos_properties (const TAO_Notify_QoSProperties &qos_properties) |
| Update QoS Properties. | |
| virtual TAO_Notify_Timer * | timer (void) |
| The object used by clients to register timers. | |
| TAO_Notify_Buffering_Strategy * | buffering_strategy (void) |
| Provide access to the underlying buffering strategy. | |
Protected Member Functions | |
| virtual int | svc (void) |
| Task svc. | |
Private Member Functions | |
| virtual void | release (void) |
| Release. | |
Private Attributes | |
| ACE_Auto_Ptr < TAO_Notify_Buffering_Strategy > | buffering_strategy_ |
| The buffering strategy to use. | |
| bool | shutdown_ |
| Shutdown. | |
| TAO_Notify_Timer_Queue::Ptr | timer_ |
| The Queue based timer. | |
Friends | |
| class | TAO_Notify_Method_Request_Shutdown |
Implements a Thread Pool Worker Task.
Definition at line 41 of file ThreadPool_Task.h.
| TAO_Notify_ThreadPool_Task::TAO_Notify_ThreadPool_Task | ( | void | ) |
| TAO_Notify_ThreadPool_Task::~TAO_Notify_ThreadPool_Task | ( | ) | [virtual] |
| TAO_Notify_Buffering_Strategy * TAO_Notify_ThreadPool_Task::buffering_strategy | ( | void | ) |
Provide access to the underlying buffering strategy.
Definition at line 40 of file ThreadPool_Task.cpp.
{
return this->buffering_strategy_.get ();
}
| int TAO_Notify_ThreadPool_Task::close | ( | u_long | flags | ) | [virtual] |
release reference to my self.
Reimplemented from ACE_Task_Base.
Definition at line 187 of file ThreadPool_Task.cpp.
{
// _incr_refcnt() for each spawned thread in init()
this->_decr_refcnt();
return 0;
}
| void TAO_Notify_ThreadPool_Task::execute | ( | TAO_Notify_Method_Request & | method_request | ) | [virtual] |
Queue the request.
Definition at line 105 of file ThreadPool_Task.cpp.
{
if (!shutdown_)
{
TAO_Notify_Method_Request_Queueable* request_copy = method_request.copy ();
if (this->buffering_strategy_->enqueue (request_copy) == -1)
{
if (TAO_debug_level > 0)
ACE_DEBUG ((LM_DEBUG, "NS_ThreadPool_Task (%P|%t) - "
"failed to enqueue\n"));
}
}
}
| int TAO_Notify_ThreadPool_Task::init | ( | int | argc, | |
| ACE_TCHAR ** | argv | |||
| ) | [virtual] |
Call the base class init.
Definition at line 28 of file ThreadPool_Task.cpp.
{
return this->ACE_Task<ACE_NULL_SYNCH>::init (argc, argv);
}
| void TAO_Notify_ThreadPool_Task::init | ( | const NotifyExt::ThreadPoolParams & | tp_params, | |
| const TAO_Notify_AdminProperties::Ptr & | admin_properties | |||
| ) |
Activate the threadpool.
Definition at line 46 of file ThreadPool_Task.cpp.
{
ACE_ASSERT (this->timer_.get() == 0);
TAO_Notify_Timer_Queue* timer = 0;
ACE_NEW_THROW_EX (timer,
TAO_Notify_Timer_Queue (),
CORBA::NO_MEMORY ());
this->timer_.reset (timer);
TAO_Notify_Buffering_Strategy* buffering_strategy = 0;
ACE_NEW_THROW_EX (buffering_strategy,
TAO_Notify_Buffering_Strategy (*msg_queue (), admin_properties),
CORBA::NO_MEMORY ());
this->buffering_strategy_.reset (buffering_strategy);
long flags = THR_NEW_LWP | THR_DETACHED;
CORBA::ORB_var orb =
TAO_Notify_PROPERTIES::instance()->orb ();
flags |=
orb->orb_core ()->orb_params ()->thread_creation_flags ();
// Guards the thread for auto-deletion; paired with close.
// This is done in the originating thread before the spawn to
// avoid any race conditions.
for ( CORBA::ULong i = 0; i < tp_params.static_threads; ++i )
{
this->_incr_refcnt();
}
// Become an active object.
if (this->ACE_Task <ACE_NULL_SYNCH>::activate (flags,
tp_params.static_threads,
0,
ACE_THR_PRI_OTHER_DEF) == -1)
{
// Undo the ref counts on error
for ( CORBA::ULong i = 0; i < tp_params.static_threads; ++i )
{
this->_decr_refcnt();
}
if (ACE_OS::last_error () == EPERM)
ACE_DEBUG ((LM_DEBUG, ACE_TEXT ("(%P|%t) Insufficient privilege.\n")));
else if (ACE_OS::last_error () == EAGAIN)
{
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT ("(%P|%t) task activation at priority %d failed %p\n"),
tp_params.default_priority, "activate"));
throw CORBA::NO_RESOURCES ();
}
throw CORBA::BAD_PARAM ();
}
}
| void TAO_Notify_ThreadPool_Task::release | ( | void | ) | [private, virtual] |
| void TAO_Notify_ThreadPool_Task::shutdown | ( | void | ) | [virtual] |
Shutdown task.
Definition at line 168 of file ThreadPool_Task.cpp.
{
if (this->shutdown_)
{
return;
}
this->shutdown_ = true;
this->buffering_strategy_->shutdown ();
}
| int TAO_Notify_ThreadPool_Task::svc | ( | void | ) | [protected, virtual] |
Task svc.
Reimplemented from ACE_Task_Base.
Definition at line 121 of file ThreadPool_Task.cpp.
{
TAO_Notify_Method_Request_Queueable* method_request = 0;
while (!shutdown_)
{
try
{
ACE_Time_Value* dequeue_blocking_time = 0;
ACE_Time_Value earliest_time;
if (!this->timer_->impl().is_empty ())
{
earliest_time = this->timer_->impl().earliest_time ();
dequeue_blocking_time = &earliest_time;
}
// Dequeue 1 item
int const result = buffering_strategy_->dequeue (method_request, dequeue_blocking_time);
if (result > 0)
{
method_request->execute ();
ACE_Message_Block::release (method_request);
}
else if (errno == ETIME)
{
this->timer_->impl ().expire ();
}
else
{
if (TAO_debug_level > 0)
ACE_DEBUG ((LM_DEBUG, "(%P|%t)ThreadPool_Task dequeue failed\n"));
}
}
catch (const CORBA::Exception& ex)
{
ex._tao_print_exception (
"ThreadPool_Task (%P|%t) exception in method request\n");
}
} /* while */
return 0;
}
| TAO_Notify_Timer * TAO_Notify_ThreadPool_Task::timer | ( | void | ) | [virtual] |
The object used by clients to register timers.
Definition at line 34 of file ThreadPool_Task.cpp.
| void TAO_Notify_ThreadPool_Task::update_qos_properties | ( | const TAO_Notify_QoSProperties & | qos_properties | ) | [virtual] |
Update QoS Properties.
Definition at line 195 of file ThreadPool_Task.cpp.
{
this->buffering_strategy_->update_qos_properties (qos_properties);
}
friend class TAO_Notify_Method_Request_Shutdown [friend] |
Definition at line 45 of file ThreadPool_Task.h.
ACE_Auto_Ptr< TAO_Notify_Buffering_Strategy > TAO_Notify_ThreadPool_Task::buffering_strategy_ [private] |
The buffering strategy to use.
Definition at line 87 of file ThreadPool_Task.h.
bool TAO_Notify_ThreadPool_Task::shutdown_ [private] |
Shutdown.
Definition at line 90 of file ThreadPool_Task.h.
The Queue based timer.
Definition at line 93 of file ThreadPool_Task.h.
 1.7.0
1.7.0

