Base Wrappers for Suppliers that connect to the EventChannel. More...
#include <Supplier.h>
Public Member Functions | |
| TAO_Notify_Supplier (TAO_Notify_ProxyConsumer *proxy) | |
| Constructor. | |
| virtual | ~TAO_Notify_Supplier () |
| Destructor. | |
| TAO_Notify_ProxyConsumer * | proxy_consumer (void) |
| Access Specific Proxy. | |
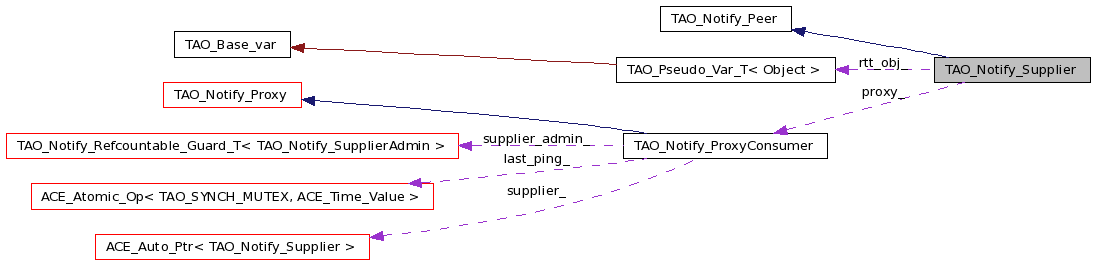
| virtual TAO_Notify_Proxy * | proxy (void) |
| Access Base Proxy. | |
| virtual CORBA::Object_ptr | get_supplier (void)=0 |
| bool | is_alive (bool allow_nil_supplier) |
Protected Member Functions | |
| virtual void | dispatch_updates_i (const CosNotification::EventTypeSeq &added, const CosNotification::EventTypeSeq &removed) |
| Dispatch updates implementation. | |
Protected Attributes | |
| TAO_Notify_ProxyConsumer * | proxy_ |
| The proxy that we associate with. | |
| CosNotifyComm::NotifySubscribe_var | subscribe_ |
| Interface that accepts subscription_changes. | |
| CORBA::Object_var | rtt_obj_ |
Base Wrappers for Suppliers that connect to the EventChannel.
Definition at line 35 of file Supplier.h.
| TAO_Notify_Supplier::TAO_Notify_Supplier | ( | TAO_Notify_ProxyConsumer * | proxy | ) |
| TAO_Notify_Supplier::~TAO_Notify_Supplier | ( | ) | [virtual] |
| void TAO_Notify_Supplier::dispatch_updates_i | ( | const CosNotification::EventTypeSeq & | added, | |
| const CosNotification::EventTypeSeq & | removed | |||
| ) | [protected, virtual] |
Dispatch updates implementation.
Implements TAO_Notify_Peer.
Definition at line 41 of file Supplier.cpp.
{
if (!CORBA::is_nil (this->subscribe_.in ()))
this->subscribe_->subscription_change (added, removed);
}
| virtual CORBA::Object_ptr TAO_Notify_Supplier::get_supplier | ( | void | ) | [pure virtual] |
Implemented in TAO_Notify_PushSupplier, TAO_Notify_SequencePushSupplier, and TAO_Notify_StructuredPushSupplier.
| bool TAO_Notify_Supplier::is_alive | ( | bool | allow_nil_supplier | ) |
Definition at line 52 of file Supplier.cpp.
{
bool status = false;
CORBA::Object_var supplier = this->get_supplier ();
if (CORBA::is_nil (supplier.in ()))
{
// The supplier may not connected or the supplier did
// not provide a callback. In this case, the liveliness
// check should return true so it will be validated in
// next period.
if (allow_nil_supplier)
return true;
else
return status;
}
CORBA::PolicyList policy_list;
try
{
bool do_liveliness_check = false;
ACE_Time_Value now = ACE_OS::gettimeofday ();
ACE_Time_Value last_ping = proxy_->last_ping();
if (CORBA::is_nil (this->rtt_obj_.in ()))
{
// We need to determine if the supplier on the other end is still
// alive. Since we may be in an upcall from the owner of the
// original supplier, we have to put a timeout on the call in case
// the client side is not processing ORB requests at this time. In
// the event that the timeout exception occurs, we will assume that
// the original supplier is still around. If we get any other
// exception we will say that the original supplier is not
// available anymore.
TimeBase::TimeT timeout = 10000000;
CORBA::Any timeout_any;
timeout_any <<= timeout;
policy_list.length (1);
policy_list[0] = TAO_Notify_PROPERTIES::instance()->orb()->
create_policy (
Messaging::RELATIVE_RT_TIMEOUT_POLICY_TYPE,
timeout_any);
rtt_obj_ =
supplier->_set_policy_overrides (policy_list,
CORBA::ADD_OVERRIDE);
// Clean up the policy that was allocated in the try/catch
for (CORBA::ULong i = 0; i < policy_list.length (); i++)
policy_list[i]->destroy ();
do_liveliness_check
= (last_ping == ACE_Time_Value::zero ? true
: now - last_ping >= TAO_Notify_PROPERTIES::instance()->validate_client_delay ());
}
else
do_liveliness_check =
now - last_ping >= TAO_Notify_PROPERTIES::instance()->validate_client_interval ();
if (CORBA::is_nil (rtt_obj_.in ()))
status = false;
else if (do_liveliness_check || allow_nil_supplier)
{
this->proxy_->last_ping (now);
status = !rtt_obj_->_non_existent ();
}
else
status = true;
}
catch (CORBA::TIMEOUT&)
{
status = true;
}
catch (CORBA::Exception& ex)
{
if (DEBUG_LEVEL > 0)
{
ex._tao_print_exception ("TAO_Notify_Supplier::is_alive: false");
}
}
return status;
}
| TAO_Notify_Proxy * TAO_Notify_Supplier::proxy | ( | void | ) | [virtual] |
Access Base Proxy.
Implements TAO_Notify_Peer.
Definition at line 35 of file Supplier.cpp.
{
return this->proxy_consumer ();
}
| TAO_Notify_ProxyConsumer * TAO_Notify_Supplier::proxy_consumer | ( | void | ) |
TAO_Notify_ProxyConsumer* TAO_Notify_Supplier::proxy_ [protected] |
The proxy that we associate with.
Definition at line 61 of file Supplier.h.
CORBA::Object_var TAO_Notify_Supplier::rtt_obj_ [protected] |
Definition at line 66 of file Supplier.h.
CosNotifyComm::NotifySubscribe_var TAO_Notify_Supplier::subscribe_ [protected] |
Interface that accepts subscription_changes.
Definition at line 64 of file Supplier.h.
 1.7.0
1.7.0

