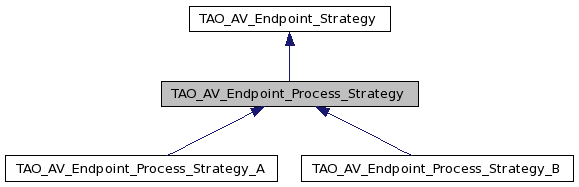
Process-based strategy for creating endpoints. Abstract base class. More...
#include <Endpoint_Strategy.h>
Public Member Functions | |
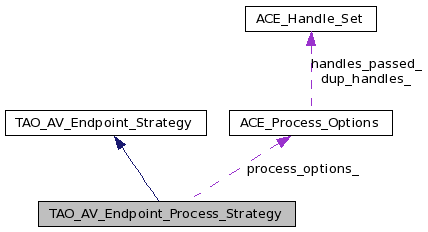
| TAO_AV_Endpoint_Process_Strategy (ACE_Process_Options *process_options) | |
| virtual | ~TAO_AV_Endpoint_Process_Strategy (void) |
| Destructor. | |
| virtual int | activate (void) |
Protected Member Functions | |
| virtual int | bind_to_naming_service (void) |
| Bind to the naming service. | |
| virtual int | get_stream_endpoint (void)=0 |
| virtual int | get_vdev (void) |
Protected Attributes | |
| CosNaming::NamingContext_var | naming_context_ |
| Naming context. | |
| ACE_Process_Options * | process_options_ |
| Name and arguments for the process to be created. | |
| char | host_ [MAXHOSTNAMELEN] |
| name of this host used for resolving unique names. | |
| pid_t | pid_ |
| My child's process id. | |
Process-based strategy for creating endpoints. Abstract base class.
Definition at line 76 of file Endpoint_Strategy.h.
| TAO_AV_Endpoint_Process_Strategy::TAO_AV_Endpoint_Process_Strategy | ( | ACE_Process_Options * | process_options | ) |
Constructor. The process_options contain the name and arguments for the process to be created
Definition at line 71 of file Endpoint_Strategy.cpp.
: process_options_ (process_options), pid_ (-1) { ACE_OS::hostname (this->host_, sizeof this->host_); }
| TAO_AV_Endpoint_Process_Strategy::~TAO_AV_Endpoint_Process_Strategy | ( | void | ) | [virtual] |
| int TAO_AV_Endpoint_Process_Strategy::activate | ( | void | ) | [virtual] |
creates a new child process, and waits on a semaphore until the child process has finished creating the endpoints
Definition at line 89 of file Endpoint_Strategy.cpp.
{
ACE_Process process;
// Create a new process to contain this endpoint
this->pid_ = process.spawn (*this->process_options_);
// Process creation failed
if (this->pid_ == -1)
ACE_ERROR_RETURN ((LM_ERROR,
"(%P|%t) ACE_Process:: spawn failed: %p\n",
"spawn"),
-1);
// Create a unique semaphore name, using my hostname, and pid.
ACE_TCHAR sem_str [BUFSIZ];
// create a unique semaphore name
ACE_OS::sprintf (sem_str,
ACE_TEXT("%s:%s:%ld"),
"TAO_AV_Process_Semaphore",
this->host_,
static_cast<long int> (this->pid_));
ACE_DEBUG ((LM_DEBUG,
"(%P|%t) semaphore is %s\n",
sem_str));
// Create the semaphore
ACE_Process_Semaphore semaphore (0, // 0 means that the
// semaphore is locked initially
sem_str);
// wait until the child finishes booting
while (1)
{
if (semaphore.acquire () == -1)
{
// See if my child process is still alive -- if not, return an error
if (ACE_OS::kill (this->pid_,
0) == -1)
ACE_ERROR_RETURN ((LM_ERROR,
"(%P|%t) Process_Strategy: Process being waited on died unexpectedly.\n"),
-1);
// if we were not interrupted due to a EINTR, break
if (errno != EINTR)
break;
}
else
break;
}
// The job of the semaphore is done, remove it.
if (semaphore.remove () == -1)
ACE_ERROR_RETURN ((LM_ERROR,
"(%P|%t) semaphore remove failed: %p\n",
"remove"),
-1);
try
{
// Get ourselves a Naming service
this->bind_to_naming_service ();
// Get the stream endpoint created by the child from the naming service
this->get_stream_endpoint ();
// Get the Vdev created by the child from the naming service
this->get_vdev ();
}
catch (const CORBA::Exception& ex)
{
ex._tao_print_exception (
"TAO_AV_Endpoint_Process_Strategy::activate");
return -1;
}
return 0;
}
| int TAO_AV_Endpoint_Process_Strategy::bind_to_naming_service | ( | void | ) | [protected, virtual] |
Bind to the naming service.
Definition at line 169 of file Endpoint_Strategy.cpp.
{
try
{
if (CORBA::is_nil (this->naming_context_.in ()) == 0)
return 0;
CORBA::Object_var naming_obj =
TAO_ORB_Core_instance ()->orb ()->resolve_initial_references ("NameService");
if (CORBA::is_nil (naming_obj.in ()))
ACE_ERROR_RETURN ((LM_ERROR,
" (%P|%t) Unable to resolve the Name Service.\n"),
-1);
this->naming_context_ =
CosNaming::NamingContext::_narrow (naming_obj.in ());
}
catch (const CORBA::Exception& ex)
{
ex._tao_print_exception (
"TAO_AV_Endpoint_Process_Strategy::bind_to_naming_service");
return -1;
}
return 0;
}
| virtual int TAO_AV_Endpoint_Process_Strategy::get_stream_endpoint | ( | void | ) | [protected, pure virtual] |
Get the object reference for the newly created stream endpoint (which will be in the child process) Subclasses will define the functionality for this
Implemented in TAO_AV_Endpoint_Process_Strategy_A, and TAO_AV_Endpoint_Process_Strategy_B.
| int TAO_AV_Endpoint_Process_Strategy::get_vdev | ( | void | ) | [protected, virtual] |
Get the Vdev object reference for the newly created endpoint
Definition at line 197 of file Endpoint_Strategy.cpp.
{
try
{
char vdev_name [BUFSIZ];
ACE_OS::sprintf (vdev_name,
"%s:%s:%ld",
"VDev",
this->host_,
(long) this->pid_);
if (TAO_debug_level > 0) ACE_DEBUG ((LM_DEBUG,"(%P|%t)%s\n",vdev_name));
// Create the name
CosNaming::Name VDev_Name (1);
VDev_Name.length (1);
VDev_Name [0].id = CORBA::string_dup (vdev_name);
// Get the CORBA::Object
CORBA::Object_var vdev =
this->naming_context_->resolve (VDev_Name);
// Narrow it
this->vdev_ =
AVStreams::VDev::_narrow (vdev.in ());
// Check if valid
if (CORBA::is_nil (this->vdev_.in() ))
ACE_ERROR_RETURN ((LM_ERROR,
" could not resolve Stream_Endpoint_B in Naming service <%s>\n"),
-1);
}
catch (const CORBA::Exception& ex)
{
ex._tao_print_exception (
"TAO_AV_Endpoint_Process_Strategy::get_vdev");
return -1;
}
return 0;
}
char TAO_AV_Endpoint_Process_Strategy::host_[MAXHOSTNAMELEN] [protected] |
name of this host used for resolving unique names.
Definition at line 114 of file Endpoint_Strategy.h.
CosNaming::NamingContext_var TAO_AV_Endpoint_Process_Strategy::naming_context_ [protected] |
Naming context.
Definition at line 108 of file Endpoint_Strategy.h.
pid_t TAO_AV_Endpoint_Process_Strategy::pid_ [protected] |
My child's process id.
Definition at line 117 of file Endpoint_Strategy.h.
Name and arguments for the process to be created.
Definition at line 111 of file Endpoint_Strategy.h.
 1.7.0
1.7.0

