#include "tao/orbconf.h"#include "tao/RTCORBA/rtcorba_export.h"#include "tao/RTCORBA/Priority_Mapping.h"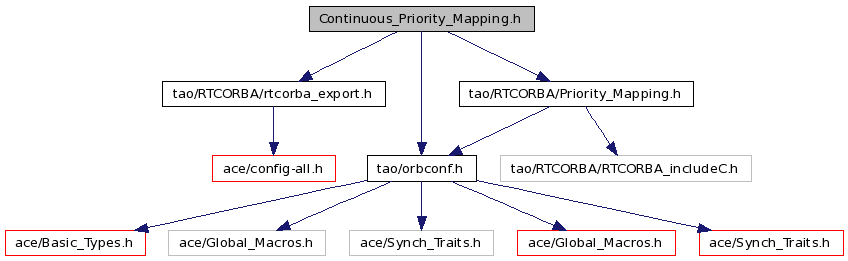

Go to the source code of this file.
Classes | |
| class | TAO_Continuous_Priority_Mapping |
| Maps the first n CORBA priorities to the range of native priorities, where n is the number of native priorities. More... | |
Definition in file Continuous_Priority_Mapping.h.
 1.7.0
1.7.0

