RTCORBA::SharedMemoryProtocolProperties implementation. More...
#include <RT_Policy_i.h>
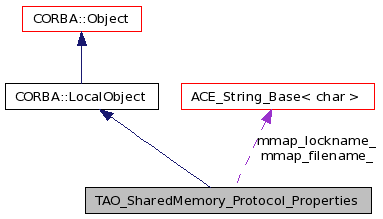
RTCORBA::SharedMemoryProtocolProperties implementation.
Stores Shared Memory Protocol configuration properties.
Definition at line 548 of file RT_Policy_i.h.
| TAO_SharedMemory_Protocol_Properties::TAO_SharedMemory_Protocol_Properties | ( | CORBA::Long | send_buffer_size, | |
| CORBA::Long | recv_buffer_size, | |||
| CORBA::Boolean | keep_alive, | |||
| CORBA::Boolean | dont_route, | |||
| CORBA::Boolean | no_delay, | |||
| CORBA::Long | preallocate_buffer_size, | |||
| const char * | mmap_filename, | |||
| const char * | mmap_lockname | |||
| ) |
Constructor.
Definition at line 827 of file RT_Policy_i.cpp.
| TAO_SharedMemory_Protocol_Properties::~TAO_SharedMemory_Protocol_Properties | ( | void | ) | [protected, virtual] |
Protected destructor to enforce proper memory management of this reference counted object.
Definition at line 846 of file RT_Policy_i.cpp.
{
}
| CORBA::Boolean TAO_SharedMemory_Protocol_Properties::_tao_decode | ( | TAO_InputCDR & | in_cdr | ) |
This method reads an instance of SharedMemoryProperties from a CDR encapsulation. This Protocol Property in TAO specific, so there is no order of encapsulation specified in the RT CORBA Spec. The current implementation expect the field according to the order of declaration.
Definition at line 968 of file RT_Policy_i.cpp.
{
return ((in_cdr >> this->send_buffer_size_)
&&
(in_cdr >> this->recv_buffer_size_)
&&
(in_cdr.read_boolean (this->keep_alive_))
&&
(in_cdr.read_boolean (this->dont_route_))
&&
(in_cdr.read_boolean (this->no_delay_))
&&
(in_cdr >> this->preallocate_buffer_size_)
&&
(in_cdr >> this->mmap_filename_)
&&
(in_cdr >> this->mmap_lockname_));
}
| CORBA::Boolean TAO_SharedMemory_Protocol_Properties::_tao_encode | ( | TAO_OutputCDR & | out_cdr | ) |
This method writes the CDR encapsulation of an instance of SharedMemoryProperties. This Protocol Property in TAO specific, so there is no order of encapsulation specified in the RT CORBA Spec. The current implementation encodes the field according to the order of declaration.
Definition at line 948 of file RT_Policy_i.cpp.
{
return ((out_cdr << this->send_buffer_size_)
&&
(out_cdr << this->recv_buffer_size_)
&&
(out_cdr.write_boolean (this->keep_alive_))
&&
(out_cdr.write_boolean (this->dont_route_))
&&
(out_cdr.write_boolean (this->no_delay_))
&&
(out_cdr << this->preallocate_buffer_size_)
&&
(out_cdr << this->mmap_filename_)
&&
(out_cdr << this->mmap_lockname_));
}
| CORBA::Boolean TAO_SharedMemory_Protocol_Properties::dont_route | ( | void | ) |
Definition at line 888 of file RT_Policy_i.cpp.
{
return this->dont_route_;
}
| void TAO_SharedMemory_Protocol_Properties::dont_route | ( | CORBA::Boolean | dont_route | ) |
Definition at line 894 of file RT_Policy_i.cpp.
{
this->dont_route_ = dont_route;
}
| CORBA::Boolean TAO_SharedMemory_Protocol_Properties::enable_network_priority | ( | void | ) |
| CORBA::Boolean TAO_SharedMemory_Protocol_Properties::keep_alive | ( | void | ) |
Definition at line 876 of file RT_Policy_i.cpp.
{
return this->keep_alive_;
}
| void TAO_SharedMemory_Protocol_Properties::keep_alive | ( | CORBA::Boolean | keep_alive | ) |
Definition at line 882 of file RT_Policy_i.cpp.
{
this->keep_alive_ = keep_alive;
}
| char * TAO_SharedMemory_Protocol_Properties::mmap_filename | ( | void | ) |
Definition at line 924 of file RT_Policy_i.cpp.
{
return this->mmap_filename_.rep ();
}
| void TAO_SharedMemory_Protocol_Properties::mmap_filename | ( | const char * | mmap_filename | ) |
Definition at line 930 of file RT_Policy_i.cpp.
{
this->mmap_filename_.set (mmap_filename);
}
| void TAO_SharedMemory_Protocol_Properties::mmap_lockname | ( | const char * | mmap_lockname | ) |
Definition at line 942 of file RT_Policy_i.cpp.
{
this->mmap_lockname_.set (mmap_lockname);
}
| char * TAO_SharedMemory_Protocol_Properties::mmap_lockname | ( | void | ) |
Definition at line 936 of file RT_Policy_i.cpp.
{
return this->mmap_lockname_.rep ();
}
| CORBA::Boolean TAO_SharedMemory_Protocol_Properties::no_delay | ( | void | ) |
Definition at line 900 of file RT_Policy_i.cpp.
{
return this->no_delay_;
}
| void TAO_SharedMemory_Protocol_Properties::no_delay | ( | CORBA::Boolean | no_delay | ) |
Definition at line 906 of file RT_Policy_i.cpp.
{
this->no_delay_ = no_delay;
}
| void TAO_SharedMemory_Protocol_Properties::preallocate_buffer_size | ( | CORBA::Long | preallocate_buffer_size | ) |
Definition at line 918 of file RT_Policy_i.cpp.
{
this->preallocate_buffer_size_ = preallocate_buffer_size;
}
| CORBA::Long TAO_SharedMemory_Protocol_Properties::preallocate_buffer_size | ( | void | ) |
Definition at line 912 of file RT_Policy_i.cpp.
{
return this->preallocate_buffer_size_;
}
| CORBA::Long TAO_SharedMemory_Protocol_Properties::recv_buffer_size | ( | void | ) |
Definition at line 864 of file RT_Policy_i.cpp.
{
return this->recv_buffer_size_;
}
| void TAO_SharedMemory_Protocol_Properties::recv_buffer_size | ( | CORBA::Long | recv_buffer_size | ) |
Definition at line 870 of file RT_Policy_i.cpp.
{
this->recv_buffer_size_ = recv_buffer_size;
}
| CORBA::Long TAO_SharedMemory_Protocol_Properties::send_buffer_size | ( | void | ) |
Definition at line 852 of file RT_Policy_i.cpp.
{
return this->send_buffer_size_;
}
| void TAO_SharedMemory_Protocol_Properties::send_buffer_size | ( | CORBA::Long | send_buffer_size | ) |
Definition at line 858 of file RT_Policy_i.cpp.
{
this->send_buffer_size_ = send_buffer_size;
}
Definition at line 629 of file RT_Policy_i.h.
Definition at line 628 of file RT_Policy_i.h.
Definition at line 632 of file RT_Policy_i.h.
Definition at line 633 of file RT_Policy_i.h.
Definition at line 630 of file RT_Policy_i.h.
Definition at line 631 of file RT_Policy_i.h.
Definition at line 627 of file RT_Policy_i.h.
Definition at line 626 of file RT_Policy_i.h.
 1.7.0
1.7.0

