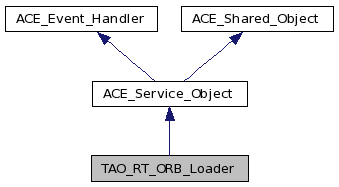
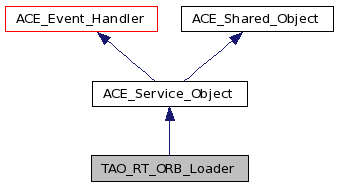
#include <RT_ORB_Loader.h>
Public Member Functions | |
| TAO_RT_ORB_Loader (void) | |
| Constructor. | |
| virtual | ~TAO_RT_ORB_Loader (void) |
| Destructor. | |
| virtual int | init (int argc, ACE_TCHAR *[]) |
| Initialize the RT ORB loader hooks. | |
Private Attributes | |
| bool | initialized_ |
| Set to true after init is called. | |
Definition at line 36 of file RT_ORB_Loader.h.
| TAO_RT_ORB_Loader::TAO_RT_ORB_Loader | ( | void | ) |
| TAO_RT_ORB_Loader::~TAO_RT_ORB_Loader | ( | void | ) | [virtual] |
| int TAO_RT_ORB_Loader::init | ( | int | argc, | |
| ACE_TCHAR * | argv[] | |||
| ) | [virtual] |
Initialize the RT ORB loader hooks.
Register the RTCORBA ORBInitializer.
Reimplemented from ACE_Shared_Object.
Definition at line 30 of file RT_ORB_Loader.cpp.
{
ACE_TRACE ("TAO_RT_ORB_Loader::init");
// Only allow initialization once.
if (this->initialized_)
return 0;
this->initialized_ = true;
ACE_Service_Gestalt *gestalt = ACE_Service_Config::current ();
ACE_Service_Object * const rt_loader =
ACE_Dynamic_Service<ACE_Service_Object>::instance (
gestalt,
"RT_ORB_Loader",
true);
if (rt_loader != 0 && rt_loader != this)
{
return rt_loader->init (argc, argv);
}
// Set defaults.
int priority_mapping_type =
TAO_RT_ORBInitializer::TAO_PRIORITY_MAPPING_DIRECT;
int network_priority_mapping_type =
TAO_RT_ORBInitializer::TAO_NETWORK_PRIORITY_MAPPING_LINEAR;
int ace_sched_policy = ACE_SCHED_OTHER;
long sched_policy = THR_SCHED_DEFAULT;
long scope_policy = THR_SCOPE_PROCESS;
int curarg = 0;
ACE_Time_Value dynamic_thread_time;
TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan lifespan = TAO_RT_ORBInitializer::TAO_RTCORBA_DT_INFINITIVE;
ACE_Arg_Shifter arg_shifter (argc, argv);
// Parse any service configurator parameters.
while (arg_shifter.is_anything_left ())
{
const ACE_TCHAR *current_arg = 0;
if (0 != (current_arg = arg_shifter.get_the_parameter
(ACE_TEXT("-ORBPriorityMapping"))))
{
const ACE_TCHAR *name = current_arg;
if (ACE_OS::strcasecmp (name,
ACE_TEXT("continuous")) == 0)
priority_mapping_type =
TAO_RT_ORBInitializer::TAO_PRIORITY_MAPPING_CONTINUOUS;
else if (ACE_OS::strcasecmp (name,
ACE_TEXT("linear")) == 0)
priority_mapping_type =
TAO_RT_ORBInitializer::TAO_PRIORITY_MAPPING_LINEAR;
else if (ACE_OS::strcasecmp (name,
ACE_TEXT("direct")) == 0)
priority_mapping_type =
TAO_RT_ORBInitializer::TAO_PRIORITY_MAPPING_DIRECT;
else
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT("RT_ORB_Loader - unknown argument")
ACE_TEXT(" <%s> for -ORBPriorityMapping\n"),
name));
arg_shifter.consume_arg ();
}
else if (0 != (current_arg = arg_shifter.get_the_parameter
(ACE_TEXT("-ORBSchedPolicy"))))
{
const ACE_TCHAR *name = current_arg;
if (ACE_OS::strcasecmp (name,
ACE_TEXT("SCHED_OTHER")) == 0)
{
ace_sched_policy = ACE_SCHED_OTHER;
sched_policy = THR_SCHED_DEFAULT;
}
else if (ACE_OS::strcasecmp (name,
ACE_TEXT("SCHED_FIFO")) == 0)
{
ace_sched_policy = ACE_SCHED_FIFO;
sched_policy = THR_SCHED_FIFO;
}
else if (ACE_OS::strcasecmp (name,
ACE_TEXT("SCHED_RR")) == 0)
{
ace_sched_policy = ACE_SCHED_RR;
sched_policy = THR_SCHED_RR;
}
else
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT("RT_ORB_Loader - unknown argument")
ACE_TEXT(" <%s> for -ORBSchedPolicy\n"),
name));
arg_shifter.consume_arg ();
}
else if (0 != (current_arg = arg_shifter.get_the_parameter
(ACE_TEXT("-ORBScopePolicy"))))
{
const ACE_TCHAR *name = current_arg;
if (ACE_OS::strcasecmp (name,
ACE_TEXT("SYSTEM")) == 0)
scope_policy = THR_SCOPE_SYSTEM;
else if (ACE_OS::strcasecmp (name,
ACE_TEXT("PROCESS")) == 0)
scope_policy = THR_SCOPE_PROCESS;
else
ACE_DEBUG ((LM_DEBUG,
ACE_TEXT("RT_ORB_Loader - unknown argument")
ACE_TEXT(" <%s> for -ORBScopePolicy\n"),
name));
arg_shifter.consume_arg ();
}
else if (0 != (current_arg = arg_shifter.get_the_parameter
(ACE_TEXT("-RTORBNetworkPriorityMapping"))))
{
const ACE_TCHAR *name = current_arg;
if (ACE_OS::strcasecmp (name,
ACE_TEXT("linear")) == 0)
network_priority_mapping_type =
TAO_RT_ORBInitializer::TAO_NETWORK_PRIORITY_MAPPING_LINEAR;
arg_shifter.consume_arg ();
}
else if (0 != (current_arg = arg_shifter.get_the_parameter
(ACE_TEXT("-RTORBDynamicThreadIdleTimeout"))))
{
const ACE_TCHAR *name = current_arg;
int timeout = ACE_OS::atoi (name);
dynamic_thread_time = ACE_Time_Value (0, timeout);
lifespan = TAO_RT_ORBInitializer::TAO_RTCORBA_DT_IDLE;
arg_shifter.consume_arg ();
}
else if (0 != (current_arg = arg_shifter.get_the_parameter
(ACE_TEXT("-RTORBDynamicThreadRunTime"))))
{
const ACE_TCHAR *name = current_arg;
int timeout = ACE_OS::atoi (name);
dynamic_thread_time = ACE_Time_Value (0, timeout);
lifespan = TAO_RT_ORBInitializer::TAO_RTCORBA_DT_FIXED;
arg_shifter.consume_arg ();
}
else
{
arg_shifter.ignore_arg ();
if (TAO_debug_level > 0)
{
ACE_ERROR ((LM_ERROR,
ACE_TEXT("RT_ORB_Loader: Unknown option ")
ACE_TEXT("<%s>.\n"),
argv[curarg]));
}
}
}
// Register the ORB initializer.
try
{
PortableInterceptor::ORBInitializer_ptr temp_orb_initializer =
PortableInterceptor::ORBInitializer::_nil ();
/// Register the RTCORBA ORBInitializer.
ACE_NEW_THROW_EX (temp_orb_initializer,
TAO_RT_ORBInitializer (priority_mapping_type,
network_priority_mapping_type,
ace_sched_policy,
sched_policy,
scope_policy,
lifespan,
dynamic_thread_time),
CORBA::NO_MEMORY (
CORBA::SystemException::_tao_minor_code (
TAO::VMCID,
ENOMEM),
CORBA::COMPLETED_NO));
PortableInterceptor::ORBInitializer_var orb_initializer;
orb_initializer = temp_orb_initializer;
PortableInterceptor::register_orb_initializer (orb_initializer.in ());
}
catch (const ::CORBA::Exception& ex)
{
ex._tao_print_exception (
"Unexpected exception caught while "
"initializing the RTORB");
return 1;
}
return 0;
}
bool TAO_RT_ORB_Loader::initialized_ [private] |
Set to true after init is called.
Definition at line 51 of file RT_ORB_Loader.h.
 1.7.0
1.7.0

