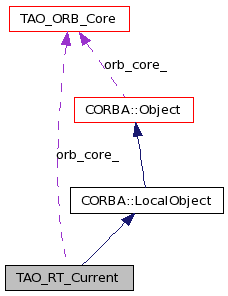
RTCORBA::Current interface iplementation. More...
#include <RT_Current.h>
Public Member Functions | |
| TAO_RT_Current (TAO_ORB_Core *orb_core) | |
| Default constructor. | |
| virtual RTCORBA::Priority | the_priority (void) |
| virtual void | the_priority (RTCORBA::Priority the_priority) |
Protected Member Functions | |
| virtual | ~TAO_RT_Current (void) |
Private Attributes | |
| TAO_ORB_Core *const | orb_core_ |
| ORB Core that owns us. | |
RTCORBA::Current interface iplementation.
Allows setting/getting the priority of the current thread.
Definition at line 43 of file RT_Current.h.
| TAO_RT_Current::TAO_RT_Current | ( | TAO_ORB_Core * | orb_core | ) |
| TAO_RT_Current::~TAO_RT_Current | ( | void | ) | [protected, virtual] |
Protected destructor to enforce proper memory management of this reference counted object.
Definition at line 29 of file RT_Current.cpp.
{
}
| RTCORBA::Priority TAO_RT_Current::the_priority | ( | void | ) | [virtual] |
Definition at line 34 of file RT_Current.cpp.
{
TAO_Protocols_Hooks *tph = this->orb_core_->get_protocols_hooks ();
RTCORBA::Priority priority = 0;
int result =
tph->get_thread_CORBA_priority (priority);
if (result == -1)
{
if (TAO_debug_level > 0)
ACE_DEBUG ((LM_DEBUG, "ERROR: TAO_RT_Current::the_priority. "
"RT CORBA Priority accessed in a thread where it has not been set.\n"));
// Spec does not define a minor code
throw CORBA::INITIALIZE ();
}
return priority;
}
| void TAO_RT_Current::the_priority | ( | RTCORBA::Priority | the_priority | ) | [virtual] |
Definition at line 56 of file RT_Current.cpp.
{
TAO_Protocols_Hooks *tph = this->orb_core_->get_protocols_hooks ();
if (tph->set_thread_CORBA_priority (the_priority) == -1)
{
// Note this check is required by "2.6 Real-time Current" which states:
// "A BAD_PARAM system exception shall be thrown if an attempt is made to set the
// priority to a value outside the range 0 to 32767."
// Note that it is not enough to assume that the mapping's rejection will deal with
// this as it also says: "If the to_native call returns FALSE ... then a Real-time ORB
// shall raise a DATA_CONVERSION system exception" i.e different exception.
if (the_priority < 0) // short
throw CORBA::BAD_PARAM (
CORBA::SystemException::_tao_minor_code (
0,
EINVAL),
CORBA::COMPLETED_NO);
throw CORBA::DATA_CONVERSION (CORBA::OMGVMCID | 2, CORBA::COMPLETED_NO);
}
}
TAO_ORB_Core* const TAO_RT_Current::orb_core_ [private] |
ORB Core that owns us.
Reimplemented from CORBA::Object.
Definition at line 65 of file RT_Current.h.
 1.7.0
1.7.0

