#include <DynUnion_i.h>

Public Member Functions | |
| TAO_DynUnion_i (void) | |
| Constructor. | |
| ~TAO_DynUnion_i (void) | |
| Destructor. | |
| void | init (const CORBA::Any &any) |
| Constructor taking an Any argument. | |
| void | init (CORBA::TypeCode_ptr tc) |
| Constructor taking a typecode argument. | |
| virtual DynamicAny::DynAny_ptr | get_discriminator (void) |
| virtual void | set_discriminator (DynamicAny::DynAny_ptr d) |
| virtual void | set_to_default_member (void) |
| virtual void | set_to_no_active_member (void) |
| virtual CORBA::Boolean | has_no_active_member (void) |
| virtual CORBA::TCKind | discriminator_kind (void) |
| virtual DynamicAny::DynAny_ptr | member (void) |
| virtual char * | member_name (void) |
| virtual CORBA::TCKind | member_kind (void) |
| virtual void | from_any (const CORBA::Any &value) |
| virtual CORBA::Any * | to_any (void) |
| virtual CORBA::Boolean | equal (DynamicAny::DynAny_ptr dyn_any) |
| virtual void | destroy (void) |
| virtual DynamicAny::DynAny_ptr | current_component (void) |
Static Public Member Functions | |
| static TAO_DynUnion_i * | _narrow (CORBA::Object_ptr obj) |
Private Member Functions | |
| void | set_from_any (const CORBA::Any &any) |
| void | init_common (void) |
| Called by both versions of init(). | |
| CORBA::Boolean | label_match (const CORBA::Any &my_any, const CORBA::Any &other_any) |
| Iterative check for label value match. | |
| TAO_DynUnion_i (const TAO_DynUnion_i &src) | |
| Use copy() or assign() instead of these. | |
| TAO_DynUnion_i & | operator= (const TAO_DynUnion_i &src) |
Private Attributes | |
| DynamicAny::DynAny_var | member_ |
| Just two components. | |
| DynamicAny::DynAny_var | discriminator_ |
| CORBA::ULong | member_slot_ |
| The active member's slot in the union type code. | |
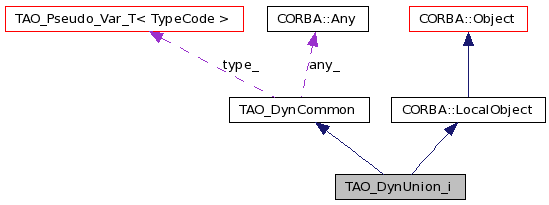
Implementation of Dynamic Any type for Unions.
Definition at line 41 of file DynUnion_i.h.
| TAO_DynUnion_i::TAO_DynUnion_i | ( | void | ) |
| TAO_DynUnion_i::~TAO_DynUnion_i | ( | void | ) |
| TAO_DynUnion_i::TAO_DynUnion_i | ( | const TAO_DynUnion_i & | src | ) | [private] |
| TAO_DynUnion_i * TAO_DynUnion_i::_narrow | ( | CORBA::Object_ptr | obj | ) | [static] |
is_local member into CORBA::Object. I'll take the easier route for now. Reimplemented from CORBA::LocalObject.
Definition at line 125 of file DynUnion_i.cpp.
{
if (CORBA::is_nil (_tao_objref))
{
return 0;
}
return dynamic_cast<TAO_DynUnion_i *> (_tao_objref);
}
| DynamicAny::DynAny_ptr TAO_DynUnion_i::current_component | ( | void | ) | [virtual] |
Definition at line 800 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
if (this->current_position_ == 1)
{
this->set_flag (this->member_.in (), 0);
return DynamicAny::DynAny::_duplicate (this->member_.in ());
}
else
{
this->set_flag (this->discriminator_.in (), 0);
return DynamicAny::DynAny::_duplicate (this->discriminator_.in ());
}
}
| void TAO_DynUnion_i::destroy | ( | void | ) | [virtual] |
Definition at line 773 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
if (!this->ref_to_component_ || this->container_is_destroying_)
{
// Free the two components.
if (! CORBA::is_nil (this->member_.in ()))
{
this->set_flag (this->member_.in (), 1);
this->member_->destroy ();
}
this->set_flag (this->discriminator_.in (), 1);
this->discriminator_->destroy ();
this->destroyed_ = 1;
}
}
| CORBA::TCKind TAO_DynUnion_i::discriminator_kind | ( | void | ) | [virtual] |
Definition at line 529 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
CORBA::TypeCode_var tc =
this->discriminator_->type ();
return TAO_DynAnyFactory::unalias (tc.in ());
}
| CORBA::Boolean TAO_DynUnion_i::equal | ( | DynamicAny::DynAny_ptr | dyn_any | ) | [virtual] |
Definition at line 739 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
TAO_DynUnion_i *impl = TAO_DynUnion_i::_narrow (rhs);
if (impl == 0)
{
return 0;
}
CORBA::Boolean equivalent =
this->type_->equivalent (impl->type_.in ());
if (!equivalent)
{
return 0;
}
CORBA::Boolean member_equal =
this->member_->equal (impl->member_.in ());
CORBA::Boolean disc_equal =
this->discriminator_->equal (impl->discriminator_.in ());
impl->_remove_ref ();
return (member_equal && disc_equal);
}
| void TAO_DynUnion_i::from_any | ( | const CORBA::Any & | value | ) | [virtual] |
Definition at line 612 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
CORBA::TypeCode_var tc = any.type ();
CORBA::Boolean equivalent =
this->type_.in ()->equivalent (tc.in ());
if (equivalent)
{
// CORBA 2.3.1 section 9.2.3.3.
this->current_position_ = 0;
// May be changed in set_from_any().
this->component_count_ = 2;
// Set the from_factory arg to FALSE, so any problems will throw
// TypeMismatch.
this->set_from_any (any
);
}
else
{
throw DynamicAny::DynAny::TypeMismatch ();
}
}
| DynamicAny::DynAny_ptr TAO_DynUnion_i::get_discriminator | ( | void | ) | [virtual] |
Definition at line 285 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
// A deep copy is made only by copy() (CORBA 2.4.2 section 9.2.3.6).
// Set the flag so the caller can't destroy.
this->set_flag (this->discriminator_.in (), 0);
return DynamicAny::DynAny::_duplicate (this->discriminator_.in ());
}
| CORBA::Boolean TAO_DynUnion_i::has_no_active_member | ( | void | ) | [virtual] |
Definition at line 517 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
// No active member (CORBA 2.3.1).
return (this->current_position_ == 0 && this->component_count_ == 1);
}
| void TAO_DynUnion_i::init | ( | CORBA::TypeCode_ptr | tc | ) |
Constructor taking a typecode argument.
Definition at line 63 of file DynUnion_i.cpp.
{
CORBA::TCKind kind = TAO_DynAnyFactory::unalias (tc);
if (kind != CORBA::tk_union)
{
throw DynamicAny::DynAnyFactory::InconsistentTypeCode ();
}
// Initialize the typecode holder and current index.
this->type_ = CORBA::TypeCode::_duplicate (tc);
this->init_common ();
// member_type()/member_label() do not work with aliased type codes.
CORBA::TypeCode_var unaliased_tc =
TAO_DynAnyFactory::strip_alias (this->type_.in ());
CORBA::Any_var first_label =
unaliased_tc->member_label (this->current_position_);
// Initialize the discriminator to the label value of the first member.
CORBA::TypeCode_var disc_tc = unaliased_tc->discriminator_type ();
CORBA::TCKind disc_kind = TAO_DynAnyFactory::unalias (disc_tc.in ());
CORBA::TCKind label_kind = TAO_DynAnyFactory::unalias (first_label->_tao_get_typecode ());
if (disc_kind == CORBA::tk_enum &&
label_kind == CORBA::tk_ulong)
{
// incase the discriminator is an enum type we have to walk
// a slightly more complex path because enum labels are
// stored as ulong in the union tc
this->discriminator_ =
TAO::MakeDynAnyUtils::make_dyn_any_t<CORBA::TypeCode_ptr> (
disc_tc.in (),
disc_tc.in ());
CORBA::ULong label_val;
first_label >>= label_val;
TAO_DynEnum_i::_narrow (this->discriminator_.in ())
->set_as_ulong (label_val);
}
else
{
this->discriminator_ =
TAO::MakeDynAnyUtils::make_dyn_any_t<const CORBA::Any&> (
first_label.in ()._tao_get_typecode (),
first_label.in ());
}
CORBA::TypeCode_var first_type =
unaliased_tc->member_type (this->current_position_
);
// Recursively initialize the member to its default value.
this->member_ =
TAO::MakeDynAnyUtils::make_dyn_any_t<CORBA::TypeCode_ptr> (
first_type.in (),
first_type.in ());
}
| void TAO_DynUnion_i::init | ( | const CORBA::Any & | any | ) |
Constructor taking an Any argument.
Definition at line 41 of file DynUnion_i.cpp.
{
CORBA::TypeCode_var tc = any.type ();
CORBA::TCKind kind = TAO_DynAnyFactory::unalias (tc.in ());
if (kind != CORBA::tk_union)
{
throw DynamicAny::DynAnyFactory::InconsistentTypeCode ();
}
// Initialize the typecode holder.
this->type_ = tc;
this->init_common ();
// Set the from_factory arg to TRUE, so any problems will throw
// InconsistentTypeCode.
this->set_from_any (any);
}
| void TAO_DynUnion_i::init_common | ( | void | ) | [private] |
Called by both versions of init().
Definition at line 29 of file DynUnion_i.cpp.
{
this->ref_to_component_ = false;
this->container_is_destroying_ = false;
this->has_components_ = true;
this->destroyed_ = false;
this->component_count_ = 2;
this->current_position_ = 0;
this->member_slot_ = 0;
}
| CORBA::Boolean TAO_DynUnion_i::label_match | ( | const CORBA::Any & | my_any, | |
| const CORBA::Any & | other_any | |||
| ) | [private] |
Iterative check for label value match.
Definition at line 824 of file DynUnion_i.cpp.
{
// Use my_any so we can detect a default case label,
// if we are iterating through the union type code's
// member_label() calls.
CORBA::TypeCode_var tc = my_any.type ();
CORBA::TCKind kind = TAO_DynAnyFactory::unalias (tc.in ());
// No need to do any type checking - it was done before this
// call was made.
switch (kind)
{
case CORBA::tk_octet:
// Default case label - just skip it.
return 0;
case CORBA::tk_short:
{
CORBA::Short my_val;
CORBA::Short other_val;
my_any >>= my_val;
other_any >>= other_val;
return my_val == other_val;
}
case CORBA::tk_long:
{
CORBA::Long my_val;
CORBA::Long other_val;
my_any >>= my_val;
other_any >>= other_val;
return my_val == other_val;
}
case CORBA::tk_ushort:
{
CORBA::UShort my_val;
CORBA::UShort other_val;
my_any >>= my_val;
other_any >>= other_val;
return my_val == other_val;
}
case CORBA::tk_ulong:
{
CORBA::ULong my_val;
CORBA::ULong other_val;
my_any >>= my_val;
// check whether the discriminator is possibly an enum type
// since these get stored as ulong label values as well
CORBA::TypeCode_var other_tc = other_any.type ();
CORBA::TCKind kind = TAO_DynAnyFactory::unalias (other_tc.in ());
if (kind == CORBA::tk_enum)
{
TAO::Any_Impl *other_impl = other_any.impl ();
if (other_impl->encoded ())
{
TAO::Unknown_IDL_Type *other_unk =
dynamic_cast<TAO::Unknown_IDL_Type *> (other_impl);
// We don't want unk's rd_ptr to move, in case we are
// shared by another Any, so we use this to copy the
// state, not the buffer.
TAO_InputCDR for_reading (other_unk->_tao_get_cdr ());
for_reading.read_ulong (other_val);
}
else
{
TAO_OutputCDR other_out;
other_impl->marshal_value (other_out);
TAO_InputCDR other_in (other_out);
other_in.read_ulong (other_val);
}
}
else
other_any >>= other_val;
return my_val == other_val;
}
case CORBA::tk_boolean:
{
CORBA::Boolean my_val;
CORBA::Boolean other_val;
my_any >>= CORBA::Any::to_boolean (my_val);
other_any >>= CORBA::Any::to_boolean (other_val);
return my_val == other_val;
}
case CORBA::tk_char:
{
CORBA::Char my_val;
CORBA::Char other_val;
my_any >>= CORBA::Any::to_char (my_val);
other_any >>= CORBA::Any::to_char (other_val);
return my_val == other_val;
}
// For platforms without native 64-bit ints.
#if !defined (ACE_LACKS_LONGLONG_T)
case CORBA::tk_longlong:
{
CORBA::LongLong my_val;
CORBA::LongLong other_val;
my_any >>= my_val;
other_any >>= other_val;
return my_val == other_val;
}
#endif /* ACE_LACKS_LONGLONG_T */
case CORBA::tk_ulonglong:
{
CORBA::ULongLong my_val;
CORBA::ULongLong other_val;
my_any >>= my_val;
other_any >>= other_val;
return my_val == other_val;
}
case CORBA::tk_wchar:
{
CORBA::WChar my_val;
CORBA::WChar other_val;
my_any >>= CORBA::Any::to_wchar (my_val);
other_any >>= CORBA::Any::to_wchar (other_val);
return my_val == other_val;
}
case CORBA::tk_enum:
{
CORBA::ULong my_val;
CORBA::ULong other_val;
TAO::Any_Impl *my_impl = my_any.impl ();
if (my_impl->encoded ())
{
TAO::Unknown_IDL_Type * const my_unk =
dynamic_cast<TAO::Unknown_IDL_Type *> (my_impl);
if (!my_unk)
throw CORBA::INTERNAL ();
// We don't want unk's rd_ptr to move, in case we are shared by
// another Any, so we use this to copy the state, not the buffer.
TAO_InputCDR for_reading (my_unk->_tao_get_cdr ());
for_reading.read_ulong (my_val);
}
else
{
TAO_OutputCDR my_out;
my_impl->marshal_value (my_out);
TAO_InputCDR my_in (my_out);
my_in.read_ulong (my_val);
}
TAO::Any_Impl *other_impl = other_any.impl ();
if (other_impl->encoded ())
{
TAO::Unknown_IDL_Type * const other_unk =
dynamic_cast<TAO::Unknown_IDL_Type *> (other_impl);
if (!other_unk)
throw CORBA::INTERNAL ();
// We don't want unk's rd_ptr to move, in case we are shared by
// another Any, so we use this to copy the state, not the buffer.
TAO_InputCDR for_reading (other_unk->_tao_get_cdr ());
for_reading.read_ulong (other_val);
}
else
{
TAO_OutputCDR other_out;
other_impl->marshal_value (other_out);
TAO_InputCDR other_in (other_out);
other_in.read_ulong (other_val);
}
return my_val == other_val;
}
// Cannot happen - we've covered all the legal discriminator types.
default:
return 0;
}
}
| DynamicAny::DynAny_ptr TAO_DynUnion_i::member | ( | void | ) | [virtual] |
Definition at line 543 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
CORBA::Boolean has_no_active_member =
this->has_no_active_member ();
if (has_no_active_member)
{
throw DynamicAny::DynAny::InvalidValue ();
}
// A deep copy is made only by copy() (CORBA 2.4.2 section 9.2.3.6).
// Set the flag so the caller can't destroy.
this->set_flag (this->member_.in (),
0
);
return DynamicAny::DynAny::_duplicate (this->member_.in ());
}
| CORBA::TCKind TAO_DynUnion_i::member_kind | ( | void | ) | [virtual] |
Definition at line 589 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
CORBA::Boolean has_no_active_member =
this->has_no_active_member ();
if (has_no_active_member)
{
throw DynamicAny::DynAny::InvalidValue ();
}
CORBA::TypeCode_var tc = this->member_->type ();
return TAO_DynAnyFactory::unalias (tc.in ());
}
| char * TAO_DynUnion_i::member_name | ( | void | ) | [virtual] |
Definition at line 568 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
CORBA::Boolean has_no_active_member =
this->has_no_active_member ();
if (has_no_active_member)
{
throw DynamicAny::DynAny::InvalidValue ();
}
const char *retval = this->type_->member_name (this->member_slot_);
return CORBA::string_dup (retval);
}
| TAO_DynUnion_i& TAO_DynUnion_i::operator= | ( | const TAO_DynUnion_i & | src | ) | [private] |
| void TAO_DynUnion_i::set_discriminator | ( | DynamicAny::DynAny_ptr | d | ) | [virtual] |
Definition at line 300 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
CORBA::TypeCode_var tc = value->type ();
CORBA::TypeCode_var disc_tc =
this->discriminator_->type ();
CORBA::Boolean equivalent = disc_tc->equivalent (tc.in ());
if (!equivalent)
{
throw DynamicAny::DynAny::TypeMismatch ();
}
CORBA::Any_var value_any = value->to_any ();
CORBA::ULong length =
this->type_->member_count ();
CORBA::Any_var label_any;
CORBA::ULong i;
// member_label() does not work with aliased type codes.
CORBA::TypeCode_var unaliased_tc =
TAO_DynAnyFactory::strip_alias (this->type_.in ());
CORBA::Boolean match = 0;
for (i = 0; i < length; ++i)
{
label_any = unaliased_tc->member_label (i);
match = this->label_match (label_any.in (), value_any.in ());
if (match)
{
break;
}
}
if (match)
{
// If the incoming label value matches the one we already
// have, we do nothing.
if (i == this->member_slot_)
{
return;
}
// If we got a match, a named member will be active.
CORBA::TCKind disc_kind = TAO_DynAnyFactory::unalias (disc_tc.in ());
CORBA::TCKind label_kind = TAO_DynAnyFactory::unalias (label_any->_tao_get_typecode ());
if (disc_kind == CORBA::tk_enum &&
label_kind == CORBA::tk_ulong)
{
// incase the discriminator is an enum type we have to walk
// a slightly more complex path because enum labels are
// stored as ulong in the union tc
CORBA::ULong label_val;
label_any >>= label_val;
TAO_DynEnum_i::_narrow (this->discriminator_.in ())
->set_as_ulong (label_val);
}
else
{
this->discriminator_->from_any (label_any.in ());
}
// member_type() does not work with aliased type codes.
CORBA::TypeCode_var member_tc = unaliased_tc->member_type (i);
this->member_->destroy ();
// Initialize member to default value.
this->member_ =
TAO::MakeDynAnyUtils::make_dyn_any_t<CORBA::TypeCode_ptr> (
member_tc.in (),
member_tc.in ());
// Named active member (CORBA 2.3.1).
this->current_position_ = 1;
this->component_count_ = 2;
this->member_slot_ = i;
// we're through, disc, value has already been set
// no need for the copy operation below.
return;
}
else
{
// default_index() does not work with aliased type codes.
CORBA::TypeCode_var unaliased_tc =
TAO_DynAnyFactory::strip_alias (this->type_.in ());
// If no match, either the default member or no member is active.
CORBA::Long default_index =
unaliased_tc->default_index ();
if (default_index == -1)
{
// This can't throw InvalidValue - if there's no default case
// and all possible labels are used, we'd have had a match above.
this->set_to_no_active_member ();
}
else
{
this->set_to_default_member ();
this->member_slot_ = static_cast<CORBA::ULong> (default_index);
}
}
// If we get here, we update the discriminator no matter what.
// Any value will correspond to one of the three cases above.
this->discriminator_->destroy ();
this->discriminator_ = value->copy ();
}
| void TAO_DynUnion_i::set_from_any | ( | const CORBA::Any & | any | ) | [private] |
Code common to the constructor from an Any arg and the member function from_any().
Definition at line 138 of file DynUnion_i.cpp.
{
// discriminator_type () does not work with aliased type codes,
// only on unions, so strip the alias out of the type code
//
CORBA::TypeCode_var tc =
TAO_DynAnyFactory::strip_alias (any._tao_get_typecode ());
CORBA::TypeCode_var disc_tc =
tc->discriminator_type ();
CORBA::Any disc_any;
TAO::Unknown_IDL_Type *unk = 0;
// Get a CDR stream - if the Any doesn't have one, make one.
TAO::Any_Impl *impl = any.impl ();
TAO_OutputCDR out;
TAO_InputCDR in (static_cast<ACE_Message_Block *> (0));
if (impl->encoded ())
{
TAO::Unknown_IDL_Type * const tmp =
dynamic_cast<TAO::Unknown_IDL_Type *> (impl);
if (!tmp)
throw CORBA::INTERNAL ();
in = tmp->_tao_get_cdr ();
}
else
{
impl->marshal_value (out);
TAO_InputCDR tmp_in (out);
in = tmp_in;
}
TAO_InputCDR unk_in (in);
ACE_NEW (unk,
TAO::Unknown_IDL_Type (disc_tc.in (),
unk_in));
disc_any.replace (unk);
// Need this here because we might have been called from init().
if (!CORBA::is_nil (this->discriminator_.in ()))
{
this->discriminator_->destroy ();
}
// Set the discriminator.
this->discriminator_ =
TAO::MakeDynAnyUtils::make_dyn_any_t<const CORBA::Any&> (
disc_any._tao_get_typecode (),
disc_any);
// Move to the next field in the CDR stream.
(void) TAO_Marshal_Object::perform_skip (disc_tc.in (), &in);
CORBA::TypeCode_var unaliased =
TAO_DynAnyFactory::strip_alias (tc.in ());
CORBA::ULong const count = unaliased->member_count ();
CORBA::Boolean match = false;
CORBA::ULong i;
// Get the index.
for (i = 0; i < count; ++i)
{
CORBA::Any_var label_any = tc->member_label (i);
match = this->label_match (label_any.in (), disc_any);
if (match)
{
break;
}
}
// Need this here because we might have been called from init().
if (!CORBA::is_nil (this->member_.in ()))
{
this->member_->destroy ();
}
if (match)
{
CORBA::TypeCode_var member_tc = tc->member_type (i);
CORBA::Any member_any;
TAO::Unknown_IDL_Type *unk = 0;
ACE_NEW (unk,
TAO::Unknown_IDL_Type (member_tc.in (),
in));
member_any.replace (unk);
this->member_ =
TAO::MakeDynAnyUtils::make_dyn_any_t<const CORBA::Any&> (
member_any._tao_get_typecode (),
member_any);
this->member_slot_ = i;
}
else
{
// If no match, either the Any contains the default member or the
// type code was bad.
// default_index() does not work with aliased type codes.
CORBA::TypeCode_var unaliased_tc =
TAO_DynAnyFactory::strip_alias (this->type_.in ());
CORBA::Long default_index =
unaliased_tc->default_index ();
if (default_index == -1)
{
set_to_no_active_member ();
}
else
{
CORBA::ULong index = static_cast<CORBA::ULong> (default_index);
CORBA::TypeCode_var default_tc =
tc->member_type (index
);
CORBA::Any default_any;
TAO::Unknown_IDL_Type *unk = 0;
ACE_NEW (unk,
TAO::Unknown_IDL_Type (default_tc.in (),
in));
default_any.replace (unk);
this->member_ =
TAO::MakeDynAnyUtils::make_dyn_any_t<const CORBA::Any&> (
default_any._tao_get_typecode (),
default_any);
this->member_slot_ = index;
}
}
}
| void TAO_DynUnion_i::set_to_default_member | ( | void | ) | [virtual] |
Definition at line 426 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
// default_index() does not work with aliased type codes.
CORBA::TypeCode_var unaliased_tc =
TAO_DynAnyFactory::strip_alias (this->type_.in ());
CORBA::Long default_index =
unaliased_tc->default_index ();
if (default_index == -1)
{
// No explicit default case.
throw DynamicAny::DynAny::TypeMismatch ();
}
else
{
CORBA::ULong index = static_cast<CORBA::ULong> (default_index);
CORBA::TypeCode_var default_tc =
unaliased_tc->member_type (index);
this->member_->destroy ();
this->member_ =
TAO::MakeDynAnyUtils::make_dyn_any_t<CORBA::TypeCode_ptr> (
default_tc.in (),
default_tc.in ());
// Default member active (CORBA 2.3.1).
this->current_position_ = 0;
this->component_count_ = 2;
this->member_slot_ = index;
}
}
| void TAO_DynUnion_i::set_to_no_active_member | ( | void | ) | [virtual] |
Definition at line 468 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
// default_index() does not work with aliased type codes.
CORBA::TypeCode_var unaliased_tc =
TAO_DynAnyFactory::strip_alias (this->type_.in ());
CORBA::Long default_index =
unaliased_tc->default_index ();
// Throw an exception is there is an explicit default case or if all
// possible case label values are used.
if (default_index != -1)
{
throw DynamicAny::DynAny::TypeMismatch ();
}
else
{
CORBA::TypeCode_var disc_tc =
this->discriminator_->type ();
CORBA::TCKind kind =
TAO_DynAnyFactory::unalias (disc_tc.in ());
if (kind == CORBA::tk_enum)
{
CORBA::ULong const member_count =
this->type_->member_count ();
CORBA::ULong const label_count =
disc_tc->member_count ();
if (member_count == label_count)
{
throw DynamicAny::DynAny::TypeMismatch ();
}
}
}
// No active member (CORBA 2.3.1).
this->current_position_ = 0;
this->component_count_ = 1;
}
| CORBA::Any_ptr TAO_DynUnion_i::to_any | ( | void | ) | [virtual] |
Definition at line 643 of file DynUnion_i.cpp.
{
if (this->destroyed_)
{
throw ::CORBA::OBJECT_NOT_EXIST ();
}
TAO_OutputCDR out_cdr;
// Add the discriminator to the CDR stream.
CORBA::TypeCode_var disc_tc =
this->discriminator_->type ();
CORBA::Any_var disc_any =
this->discriminator_->to_any ();
TAO::Any_Impl *disc_any_impl = disc_any->impl ();
TAO_OutputCDR disc_out_cdr;
TAO_InputCDR disc_in_cdr (static_cast<ACE_Message_Block *> (0));
if (disc_any_impl->encoded ())
{
TAO::Unknown_IDL_Type * const disc_unk =
dynamic_cast<TAO::Unknown_IDL_Type *> (disc_any_impl);
if (!disc_unk)
throw CORBA::INTERNAL ();
disc_in_cdr = disc_unk->_tao_get_cdr ();
}
else
{
disc_any_impl->marshal_value (disc_out_cdr);
TAO_InputCDR disc_tmp_in_cdr (disc_out_cdr);
disc_in_cdr = disc_tmp_in_cdr;
}
(void) TAO_Marshal_Object::perform_append (disc_tc.in (),
&disc_in_cdr,
&out_cdr);
// Add the member to the CDR stream unless it has no active member.
if (this->has_no_active_member () == 0)
{
CORBA::TypeCode_var member_tc =
this->member_->type ();
CORBA::Any_var member_any =
this->member_->to_any ();
TAO::Any_Impl *member_any_impl = member_any->impl ();
TAO_OutputCDR member_out_cdr;
TAO_InputCDR member_in_cdr (static_cast<ACE_Message_Block *> (0));
if (member_any_impl->encoded ())
{
TAO::Unknown_IDL_Type * const member_unk =
dynamic_cast<TAO::Unknown_IDL_Type *> (member_any_impl);
if (!member_unk)
throw CORBA::INTERNAL ();
member_in_cdr = member_unk->_tao_get_cdr ();
}
else
{
member_any_impl->marshal_value (member_out_cdr);
TAO_InputCDR member_tmp_in_cdr (member_out_cdr);
member_in_cdr = member_tmp_in_cdr;
}
(void) TAO_Marshal_Object::perform_append (member_tc.in (),
&member_in_cdr,
&out_cdr);
}
// Make the Any.
TAO_InputCDR in_cdr (out_cdr);
CORBA::Any_ptr retval = 0;
ACE_NEW_THROW_EX (retval,
CORBA::Any,
CORBA::NO_MEMORY ());
TAO::Unknown_IDL_Type *unk = 0;
ACE_NEW_THROW_EX (unk,
TAO::Unknown_IDL_Type (this->type_.in (),
in_cdr),
CORBA::NO_MEMORY ());
retval->replace (unk);
return retval;
}
DynamicAny::DynAny_var TAO_DynUnion_i::discriminator_ [private] |
Definition at line 113 of file DynUnion_i.h.
DynamicAny::DynAny_var TAO_DynUnion_i::member_ [private] |
Just two components.
Definition at line 112 of file DynUnion_i.h.
CORBA::ULong TAO_DynUnion_i::member_slot_ [private] |
The active member's slot in the union type code.
Definition at line 116 of file DynUnion_i.h.
 1.7.0
1.7.0

