#include <Thread_Pool.h>
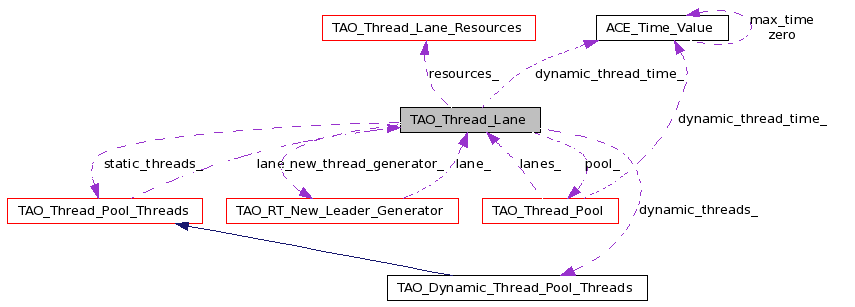
Collaboration diagram for TAO_Thread_Lane:
Accessors | |
| TAO_Thread_Pool & | pool (void) const |
| CORBA::ULong | id (void) const |
| CORBA::Short | lane_priority (void) const |
| CORBA::ULong | static_threads (void) const |
| CORBA::ULong | dynamic_threads (void) const |
| CORBA::ULong | current_threads (void) const |
| CORBA::Short | native_priority (void) const |
| TAO_Thread_Lane_Resources & | resources (void) |
| TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan | lifespan (void) const |
| ACE_Time_Value const & | dynamic_thread_time (void) const |
Public Member Functions | |
| TAO_Thread_Lane (TAO_Thread_Pool &pool, CORBA::ULong id, CORBA::Short lane_priority, CORBA::ULong static_threads, CORBA::ULong dynamic_threads, TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan lifespan, ACE_Time_Value const &dynamic_thread_time) | |
| Constructor. | |
| ~TAO_Thread_Lane (void) | |
| Destructor. | |
| void | open (void) |
| Open the lane. | |
| void | finalize (void) |
| Finalize the resources. | |
| void | shutdown_reactor (void) |
| Shutdown the reactor. | |
| void | wait (void) |
| Wait for threads to exit. | |
| int | is_collocated (const TAO_MProfile &mprofile) |
| Does mprofile belong to us? | |
| int | create_static_threads (void) |
| Create the static threads - only called once. | |
| void | shutting_down (void) |
| bool | new_dynamic_thread (void) |
Private Member Functions | |
| void | validate_and_map_priority (void) |
| Validate lane's priority and map it to a native value. | |
| int | create_threads_i (TAO_Thread_Pool_Threads &thread_pool, CORBA::ULong number_of_threads, long thread_flags) |
| int | create_dynamic_threads (CORBA::ULong number_of_threads) |
Private Attributes | |
| TAO_Thread_Pool & | pool_ |
| The Thread Pool to which this lane belongs. | |
| CORBA::ULong const | id_ |
| The id of this lane. | |
| CORBA::Short | lane_priority_ |
| bool | shutdown_ |
| CORBA::ULong const | static_threads_number_ |
| Number of static threads. | |
| CORBA::ULong const | dynamic_threads_number_ |
| Maximum number of threads we are allowed to create. | |
| TAO_Thread_Pool_Threads | static_threads_ |
| Array with all static threads. | |
| TAO_Dynamic_Thread_Pool_Threads | dynamic_threads_ |
| Array with all dynamic threads. | |
| TAO_RT_New_Leader_Generator | new_thread_generator_ |
| TAO_Thread_Lane_Resources | resources_ |
| CORBA::Short | native_priority_ |
| TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan const | lifespan_ |
| ACE_Time_Value const | dynamic_thread_time_ |
| TAO_SYNCH_MUTEX | lock_ |
| Lock to guard all members of the lane. | |
Definition at line 126 of file Thread_Pool.h.
| TAO_Thread_Lane::TAO_Thread_Lane | ( | TAO_Thread_Pool & | pool, | |
| CORBA::ULong | id, | |||
| CORBA::Short | lane_priority, | |||
| CORBA::ULong | static_threads, | |||
| CORBA::ULong | dynamic_threads, | |||
| TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan | lifespan, | |||
| ACE_Time_Value const & | dynamic_thread_time | |||
| ) |
Constructor.
Definition at line 155 of file Thread_Pool.cpp.
00162 : pool_ (pool), 00163 id_ (id), 00164 lane_priority_ (lane_priority), 00165 shutdown_ (false), 00166 static_threads_number_ (static_threads), 00167 dynamic_threads_number_ (dynamic_threads), 00168 static_threads_ (*this), 00169 dynamic_threads_ (*this), 00170 new_thread_generator_ (*this), 00171 resources_ (pool.manager ().orb_core (), 00172 &new_thread_generator_), 00173 native_priority_ (TAO_INVALID_PRIORITY), 00174 lifespan_ (lifespan), 00175 dynamic_thread_time_ (dynamic_thread_time) 00176 { 00177 }
| TAO_Thread_Lane::~TAO_Thread_Lane | ( | void | ) |
| int TAO_Thread_Lane::create_dynamic_threads | ( | CORBA::ULong | number_of_threads | ) | [private] |
Create number_of_threads of dynamic threads. Can be called multiple times.
Definition at line 415 of file Thread_Pool.cpp.
References ACE_GUARD_RETURN, create_threads_i(), TAO_SYNCH_MUTEX, THR_BOUND, and THR_DETACHED.
00416 { 00417 ACE_GUARD_RETURN (TAO_SYNCH_MUTEX, 00418 mon, 00419 this->lock_, 00420 0); 00421 00422 return this->create_threads_i (this->dynamic_threads_, 00423 number_of_threads, 00424 THR_BOUND | THR_DETACHED); 00425 }
| int TAO_Thread_Lane::create_static_threads | ( | void | ) |
Create the static threads - only called once.
Definition at line 401 of file Thread_Pool.cpp.
References ACE_GUARD_RETURN, create_threads_i(), TAO_SYNCH_MUTEX, THR_JOINABLE, and THR_NEW_LWP.
00402 { 00403 ACE_GUARD_RETURN (TAO_SYNCH_MUTEX, 00404 mon, 00405 this->lock_, 00406 0); 00407 00408 // Create static threads. 00409 return this->create_threads_i (this->static_threads_, 00410 this->static_threads_number_, 00411 THR_NEW_LWP | THR_JOINABLE); 00412 }
| int TAO_Thread_Lane::create_threads_i | ( | TAO_Thread_Pool_Threads & | thread_pool, | |
| CORBA::ULong | number_of_threads, | |||
| long | thread_flags | |||
| ) | [private] |
Definition at line 428 of file Thread_Pool.cpp.
References ACE_NEW_RETURN, ACE_Task_Base::activate(), TAO_Thread_Pool::manager(), TAO_Thread_Pool_Manager::orb_core(), TAO_ORB_Core::orb_params(), pool(), and TAO_ORB_Parameters::thread_creation_flags().
Referenced by create_dynamic_threads(), create_static_threads(), and new_dynamic_thread().
00431 { 00432 // Overwritten parameters. 00433 int force_active = 1; 00434 00435 // Default parameters. 00436 int default_grp_id = -1; 00437 ACE_Task_Base *default_task = 0; 00438 ACE_hthread_t *default_thread_handles = 0; 00439 void **default_stack = 0; 00440 00441 // Setting stack size. 00442 size_t *stack_size_array = 0; 00443 ACE_NEW_RETURN (stack_size_array, 00444 size_t[number_of_threads], 00445 -1); 00446 size_t index; 00447 for (index = 0; 00448 index != number_of_threads; 00449 ++index) 00450 stack_size_array[index] = 00451 this->pool ().stack_size (); 00452 00453 // Make sure the dynamically created stack size array is properly 00454 // deleted. 00455 ACE_Auto_Basic_Array_Ptr<size_t> auto_stack_size_array (stack_size_array); 00456 00457 TAO_ORB_Core &orb_core = 00458 this->pool ().manager ().orb_core (); 00459 00460 long flags = 00461 thread_flags | 00462 orb_core.orb_params ()->thread_creation_flags (); 00463 00464 // Activate the threads. 00465 int result = 00466 thread_pool.activate (flags, 00467 number_of_threads, 00468 force_active, 00469 this->native_priority_, 00470 default_grp_id, 00471 default_task, 00472 default_thread_handles, 00473 default_stack, 00474 stack_size_array); 00475 00476 if (result != 0) 00477 return result; 00478 00479 return result; 00480 }
| CORBA::ULong TAO_Thread_Lane::current_threads | ( | void | ) | const |
Definition at line 388 of file Thread_Pool.cpp.
References ACE_GUARD_RETURN, dynamic_threads_, TAO_SYNCH_MUTEX, and ACE_Task_Base::thr_count().
00389 { 00390 ACE_GUARD_RETURN (TAO_SYNCH_MUTEX, 00391 mon, 00392 this->lock_, 00393 0); 00394 00395 return (this->static_threads_.thr_count () + 00396 this->dynamic_threads_.thr_count ()); 00397 }
| ACE_INLINE ACE_Time_Value const & TAO_Thread_Lane::dynamic_thread_time | ( | void | ) | const |
Definition at line 72 of file Thread_Pool.inl.
References dynamic_thread_time_.
Referenced by TAO_Dynamic_Thread_Pool_Threads::run().
00073 { 00074 return this->dynamic_thread_time_; 00075 }
| ACE_INLINE CORBA::ULong TAO_Thread_Lane::dynamic_threads | ( | void | ) | const |
Definition at line 51 of file Thread_Pool.inl.
References dynamic_threads_number_.
00052 { 00053 return this->dynamic_threads_number_; 00054 }
| void TAO_Thread_Lane::finalize | ( | void | ) |
Finalize the resources.
Definition at line 362 of file Thread_Pool.cpp.
References TAO_Thread_Lane_Resources::finalize(), and resources_.
00363 { 00364 // Finalize resources. 00365 this->resources_.finalize (); 00366 }
| ACE_INLINE CORBA::ULong TAO_Thread_Lane::id | ( | void | ) | const |
Definition at line 16 of file Thread_Pool.inl.
References id_.
Referenced by open(), and TAO_Dynamic_Thread_Pool_Threads::run().
00017 { 00018 return this->id_; 00019 }
| int TAO_Thread_Lane::is_collocated | ( | const TAO_MProfile & | mprofile | ) |
Does mprofile belong to us?
Definition at line 382 of file Thread_Pool.cpp.
References TAO_Thread_Lane_Resources::is_collocated(), and resources_.
00383 { 00384 return this->resources_.is_collocated (mprofile); 00385 }
| ACE_INLINE CORBA::Short TAO_Thread_Lane::lane_priority | ( | void | ) | const |
Definition at line 30 of file Thread_Pool.inl.
References lane_priority_.
00031 { 00032 return this->lane_priority_; 00033 }
| ACE_INLINE TAO_RT_ORBInitializer::TAO_RTCORBA_DT_LifeSpan TAO_Thread_Lane::lifespan | ( | void | ) | const |
Definition at line 65 of file Thread_Pool.inl.
References lifespan_.
00066 { 00067 return this->lifespan_; 00068 }
| ACE_INLINE CORBA::Short TAO_Thread_Lane::native_priority | ( | void | ) | const |
Definition at line 37 of file Thread_Pool.inl.
References native_priority_.
00038 { 00039 return this->native_priority_; 00040 }
| bool TAO_Thread_Lane::new_dynamic_thread | ( | void | ) |
It can be that no thread can be created because the number of threads is equal to the maximum we can have or the Thread Lane is shutting down.
| true | A new thread is created | |
| false | No thread could be created |
Definition at line 180 of file Thread_Pool.cpp.
References ACE_DEBUG, ACE_ERROR_RETURN, ACE_GUARD_RETURN, ACE_TEXT, create_threads_i(), dynamic_threads_, dynamic_threads_number_, TAO_ORB_Core::has_shutdown(), id_, LM_DEBUG, LM_ERROR, TAO_Thread_Pool::manager(), TAO_Thread_Pool_Manager::orb_core(), pool_, shutdown_, static_threads_number_, TAO_debug_level, TAO_SYNCH_MUTEX, THR_BOUND, ACE_Task_Base::thr_count(), and THR_DETACHED.
Referenced by TAO_RT_New_Leader_Generator::no_leaders_available().
00181 { 00182 // Note that we are checking this condition below without the lock 00183 // held. 00184 if (this->dynamic_threads_.thr_count () >= this->dynamic_threads_number_) 00185 return false; 00186 00187 ACE_GUARD_RETURN (TAO_SYNCH_MUTEX, 00188 mon, 00189 this->lock_, 00190 false); 00191 00192 TAO_Thread_Pool_Manager &manager = this->pool_.manager (); 00193 00194 if (!manager.orb_core ().has_shutdown () && !this->shutdown_&& 00195 this->dynamic_threads_.thr_count () < this->dynamic_threads_number_) 00196 { 00197 if (TAO_debug_level > 0) 00198 ACE_DEBUG ((LM_DEBUG, 00199 ACE_TEXT ("TAO Process %P Pool %d Lane %d Thread %t\n") 00200 ACE_TEXT ("Current number of dynamic threads = %d; ") 00201 ACE_TEXT ("static threads = %d; max dynamic threads = %d\n") 00202 ACE_TEXT ("No leaders available; creating new leader!\n"), 00203 this->pool_.id (), 00204 this->id_, 00205 this->dynamic_threads_.thr_count (), 00206 this->static_threads_number_, 00207 this->dynamic_threads_number_)); 00208 00209 int result = 00210 this->create_threads_i (this->dynamic_threads_, 00211 1, 00212 THR_BOUND | THR_DETACHED); 00213 00214 if (result != 0) 00215 ACE_ERROR_RETURN ((LM_ERROR, 00216 ACE_TEXT ("Pool %d Lane %d Thread %t: ") 00217 ACE_TEXT ("cannot create dynamic thread\n"), 00218 this->pool_.id (), 00219 this->id_), 00220 false); 00221 } 00222 00223 return true; 00224 }
| void TAO_Thread_Lane::open | ( | void | ) |
Open the lane.
Definition at line 285 of file Thread_Pool.cpp.
References CORBA::SystemException::_tao_minor_code(), CORBA::COMPLETED_NO, TAO_ORB_Parameters::get_endpoint_set(), id(), TAO_Thread_Pool::manager(), TAO_Thread_Lane_Resources::open_acceptor_registry(), TAO_Thread_Pool_Manager::orb_core(), TAO_ORB_Core::orb_params(), pool(), resources_, ACE_OS::sprintf(), TAO_ACCEPTOR_REGISTRY_OPEN_LOCATION_CODE, TAO_DEFAULT_LANE, TAO_EndpointSet, and validate_and_map_priority().
00286 { 00287 // Validate and map priority. 00288 this->validate_and_map_priority (); 00289 00290 char pool_lane_id[10]; 00291 TAO_ORB_Parameters *params = 00292 this->pool ().manager ().orb_core ().orb_params (); 00293 TAO_EndpointSet endpoint_set; 00294 00295 // Create a string just *:* which means all pools all thread id's 00296 ACE_OS::sprintf (pool_lane_id, 00297 "*:*"); 00298 00299 // Get the endpoints for all 00300 params->get_endpoint_set (pool_lane_id, endpoint_set); 00301 00302 // Create a string with pool:* which means all lanes for this pool 00303 ACE_OS::sprintf (pool_lane_id, 00304 "%d:*", 00305 this->pool ().id ()); 00306 00307 // Get the endpoints for this pool. 00308 params->get_endpoint_set (pool_lane_id, endpoint_set); 00309 00310 // Create a string with *:lane which means a lan of all pools 00311 ACE_OS::sprintf (pool_lane_id, 00312 "*:%d", 00313 this->id ()); 00314 00315 // Get the endpoints for this lane. 00316 params->get_endpoint_set (pool_lane_id, endpoint_set); 00317 00318 // Create a string with the pool:thread id. 00319 ACE_OS::sprintf (pool_lane_id, 00320 "%d:%d", 00321 this->pool ().id (), 00322 this->id ()); 00323 00324 // Get the endpoints for this lane. 00325 params->get_endpoint_set (pool_lane_id, endpoint_set); 00326 00327 bool ignore_address = false; 00328 00329 if (endpoint_set.is_empty ()) 00330 { 00331 // If endpoints are not specified for this lane, use the 00332 // endpoints specified for the default lane but ignore their 00333 // addresses. 00334 params->get_endpoint_set (TAO_DEFAULT_LANE, endpoint_set); 00335 00336 ignore_address = true; 00337 } 00338 else 00339 { 00340 // If endpoints are specified for this lane, use them with their 00341 // addresses. 00342 ignore_address = false; 00343 } 00344 00345 // Open the acceptor registry. 00346 int const result = 00347 this->resources_.open_acceptor_registry (endpoint_set, ignore_address); 00348 00349 if (result == -1) 00350 throw ::CORBA::INTERNAL ( 00351 CORBA::SystemException::_tao_minor_code ( 00352 TAO_ACCEPTOR_REGISTRY_OPEN_LOCATION_CODE, 00353 0), 00354 CORBA::COMPLETED_NO); 00355 }
| ACE_INLINE TAO_Thread_Pool & TAO_Thread_Lane::pool | ( | void | ) | const |
Definition at line 23 of file Thread_Pool.inl.
References pool_.
Referenced by create_threads_i(), open(), and TAO_Thread_Pool_Threads::svc().
00024 { 00025 return this->pool_; 00026 }
| ACE_INLINE TAO_Thread_Lane_Resources & TAO_Thread_Lane::resources | ( | void | ) |
Definition at line 58 of file Thread_Pool.inl.
References resources_.
Referenced by TAO_RT_Thread_Lane_Resources_Manager::lane_resources().
00059 { 00060 return this->resources_; 00061 }
| void TAO_Thread_Lane::shutdown_reactor | ( | void | ) |
Shutdown the reactor.
Definition at line 369 of file Thread_Pool.cpp.
References resources_, and TAO_Thread_Lane_Resources::shutdown_reactor().
00370 { 00371 this->resources_.shutdown_reactor (); 00372 }
| void TAO_Thread_Lane::shutting_down | ( | void | ) |
Mark that this lane is shutting down, we then don't create any dynamic threads anymore. When the pool is shutting down the leader follower loop is called which can cause a request to create a new dynamic thread but we shouldn't create a new one.
Definition at line 227 of file Thread_Pool.cpp.
References ACE_GUARD, shutdown_, and TAO_SYNCH_MUTEX.
00228 { 00229 ACE_GUARD (TAO_SYNCH_MUTEX, 00230 mon, 00231 this->lock_); 00232 00233 // We are shutting down, this way we are not creating any more new dynamic 00234 // threads 00235 this->shutdown_ = true; 00236 }
| ACE_INLINE CORBA::ULong TAO_Thread_Lane::static_threads | ( | void | ) | const |
Definition at line 44 of file Thread_Pool.inl.
References static_threads_number_.
00045 { 00046 return this->static_threads_number_; 00047 }
| void TAO_Thread_Lane::validate_and_map_priority | ( | void | ) | [private] |
Validate lane's priority and map it to a native value.
Definition at line 239 of file Thread_Pool.cpp.
References TAO_Priority_Mapping_Manager::_narrow(), ACE_DEBUG, ACE_TEXT, TAO_Priority_Mapping_Manager_var::in(), TAO_Pseudo_Var_T< T >::in(), LM_DEBUG, TAO_Thread_Pool::manager(), TAO_Priority_Mapping_Manager::mapping(), TAO_ORB_Core::orb(), TAO_Thread_Pool_Manager::orb_core(), pool_, CORBA::ORB::resolve_initial_references(), TAO_debug_level, and TAO_OBJID_PRIORITYMAPPINGMANAGER.
Referenced by open().
00240 { 00241 // Make sure that static_threads_number_ is not zero. 00242 if (this->static_threads_number_ == 0) 00243 throw ::CORBA::BAD_PARAM (); 00244 00245 // Check that the priority is in bounds. 00246 if (this->lane_priority_ < RTCORBA::minPriority 00247 // The line below will always be false unless the value of 00248 // RTCORBA::maxPriority, which is now assigned the value of 00249 // 32767, is changed in RTCORBA.pidl. 00250 // || this->lane_priority_ > RTCORBA::maxPriority 00251 ) 00252 { 00253 throw ::CORBA::BAD_PARAM (); 00254 } 00255 00256 CORBA::ORB_ptr orb = this->pool_.manager ().orb_core ().orb (); 00257 00258 // Get the priority mapping manager. 00259 CORBA::Object_var obj = 00260 orb->resolve_initial_references (TAO_OBJID_PRIORITYMAPPINGMANAGER); 00261 00262 TAO_Priority_Mapping_Manager_var mapping_manager = 00263 TAO_Priority_Mapping_Manager::_narrow (obj.in ()); 00264 00265 RTCORBA::PriorityMapping *pm = mapping_manager.in ()->mapping (); 00266 00267 // Map CORBA priority to native priority. 00268 CORBA::Boolean const result = 00269 pm->to_native (this->lane_priority_, this->native_priority_); 00270 00271 if (!result) 00272 throw ::CORBA::DATA_CONVERSION (); 00273 00274 if (TAO_debug_level > 3) 00275 { 00276 ACE_DEBUG ((LM_DEBUG, 00277 ACE_TEXT ("TAO (%P|%t) - creating thread at ") 00278 ACE_TEXT ("(corba:native) priority %d:%d\n"), 00279 this->lane_priority_, 00280 this->native_priority_)); 00281 } 00282 }
| void TAO_Thread_Lane::wait | ( | void | ) |
Wait for threads to exit.
Definition at line 375 of file Thread_Pool.cpp.
References dynamic_threads_, static_threads_, and ACE_Task_Base::wait().
00376 { 00377 this->static_threads_.wait (); 00378 this->dynamic_threads_.wait (); 00379 }
ACE_Time_Value const TAO_Thread_Lane::dynamic_thread_time_ [private] |
Array with all dynamic threads.
Definition at line 231 of file Thread_Pool.h.
Referenced by current_threads(), new_dynamic_thread(), and wait().
CORBA::ULong const TAO_Thread_Lane::dynamic_threads_number_ [private] |
Maximum number of threads we are allowed to create.
Definition at line 225 of file Thread_Pool.h.
Referenced by dynamic_threads(), and new_dynamic_thread().
CORBA::ULong const TAO_Thread_Lane::id_ [private] |
The id of this lane.
Definition at line 213 of file Thread_Pool.h.
Referenced by id(), and new_dynamic_thread().
CORBA::Short TAO_Thread_Lane::lane_priority_ [private] |
TAO_SYNCH_MUTEX TAO_Thread_Lane::lock_ [mutable, private] |
Definition at line 233 of file Thread_Pool.h.
TAO_Thread_Pool& TAO_Thread_Lane::pool_ [private] |
The Thread Pool to which this lane belongs.
Definition at line 210 of file Thread_Pool.h.
Referenced by new_dynamic_thread(), pool(), and validate_and_map_priority().
Definition at line 235 of file Thread_Pool.h.
Referenced by finalize(), is_collocated(), open(), resources(), and shutdown_reactor().
bool TAO_Thread_Lane::shutdown_ [private] |
This boolean is set when we are shutting down, then we will not create any new dynamic threads
Definition at line 219 of file Thread_Pool.h.
Referenced by new_dynamic_thread(), and shutting_down().
CORBA::ULong const TAO_Thread_Lane::static_threads_number_ [private] |
Number of static threads.
Definition at line 222 of file Thread_Pool.h.
Referenced by new_dynamic_thread(), and static_threads().
 1.4.7
1.4.7