#include <RT_Current.h>
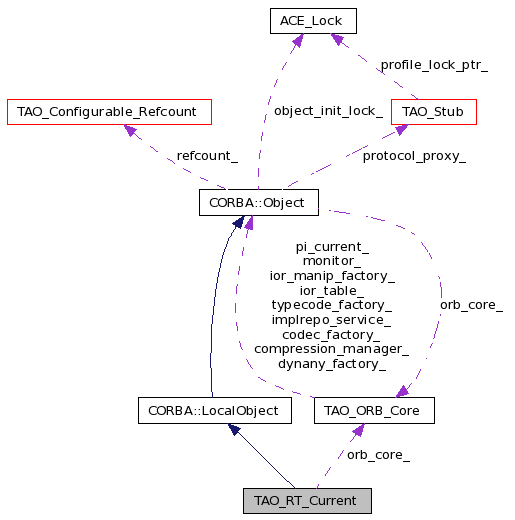
Inheritance diagram for TAO_RT_Current:
Public Member Functions | |
| TAO_RT_Current (TAO_ORB_Core *orb_core) | |
| Default constructor. | |
| virtual RTCORBA::Priority | the_priority (void) |
| virtual void | the_priority (RTCORBA::Priority the_priority) |
Protected Member Functions | |
| virtual | ~TAO_RT_Current (void) |
Private Attributes | |
| TAO_ORB_Core *const | orb_core_ |
| ORB Core that owns us. | |
Allows setting/getting the priority of the current thread.
Definition at line 43 of file RT_Current.h.
| TAO_BEGIN_VERSIONED_NAMESPACE_DECL TAO_RT_Current::TAO_RT_Current | ( | TAO_ORB_Core * | orb_core | ) |
| TAO_RT_Current::~TAO_RT_Current | ( | void | ) | [protected, virtual] |
Protected destructor to enforce proper memory management of this reference counted object.
Definition at line 29 of file RT_Current.cpp.
| void TAO_RT_Current::the_priority | ( | RTCORBA::Priority | the_priority | ) | [virtual] |
Definition at line 50 of file RT_Current.cpp.
References CORBA::COMPLETED_NO, TAO_ORB_Core::get_protocols_hooks(), orb_core_, and TAO_Protocols_Hooks::set_thread_CORBA_priority().
00051 { 00052 00053 TAO_Protocols_Hooks *tph = this->orb_core_->get_protocols_hooks (); 00054 00055 if (tph != 0) 00056 { 00057 if (tph->set_thread_CORBA_priority (the_priority) == -1) 00058 throw ::CORBA::DATA_CONVERSION (1, CORBA::COMPLETED_NO); 00059 } 00060 }
| RTCORBA::Priority TAO_RT_Current::the_priority | ( | void | ) | [virtual] |
Definition at line 34 of file RT_Current.cpp.
References CORBA::COMPLETED_NO, TAO_ORB_Core::get_protocols_hooks(), TAO_Protocols_Hooks::get_thread_CORBA_priority(), and orb_core_.
00035 { 00036 TAO_Protocols_Hooks *tph = this->orb_core_->get_protocols_hooks (); 00037 00038 RTCORBA::Priority priority = 0; 00039 00040 if (tph != 0) 00041 { 00042 if (tph->get_thread_CORBA_priority (priority) == -1) 00043 throw ::CORBA::DATA_CONVERSION (1, CORBA::COMPLETED_NO); 00044 } 00045 00046 return priority; 00047 }
TAO_ORB_Core* const TAO_RT_Current::orb_core_ [private] |
ORB Core that owns us.
Reimplemented from CORBA::Object.
Definition at line 65 of file RT_Current.h.
Referenced by the_priority().
 1.4.7
1.4.7