#include <ImR_Locator_i.h>
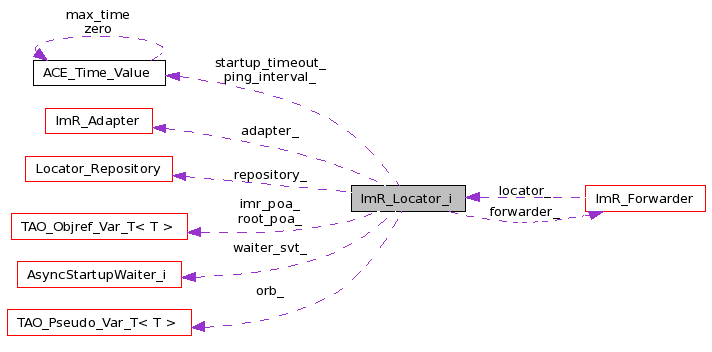
Collaboration diagram for ImR_Locator_i:
Public Member Functions | |
| ImR_Locator_i () | |
| ~ImR_Locator_i (void) | |
| int | init (Options &opts) |
| Initialize the service, creating its own orb, poa, etc. | |
| int | init_with_orb (CORBA::ORB_ptr orb, Options &opts) |
| Same as above, but use the given orb. | |
| int | fini (void) |
| Cleans up any state created by init*. | |
| int | run (void) |
| Run using the orb reference created during init(). | |
| void | shutdown (bool wait_for_completion) |
| Shutdown the orb. | |
| int | debug () const |
| virtual CORBA::Long | register_activator (const char *name, ImplementationRepository::Activator_ptr admin) |
| virtual void | unregister_activator (const char *name, CORBA::Long token) |
| virtual void | notify_child_death (const char *name) |
| virtual void | activate_server (const char *name) |
| virtual void | add_or_update_server (const char *name, const ImplementationRepository::StartupOptions &options) |
| virtual void | remove_server (const char *name) |
| virtual void | shutdown_server (const char *name) |
| virtual void | find (const char *name, ImplementationRepository::ServerInformation_out info) |
| virtual void | list (CORBA::ULong how_many, ImplementationRepository::ServerInformationList_out server_list, ImplementationRepository::ServerInformationIterator_out server_iterator) |
| virtual void | shutdown (CORBA::Boolean activators, CORBA::Boolean servers) |
| virtual void | server_is_running (const char *name, const char *partial_ior, ImplementationRepository::ServerObject_ptr server_object) |
| virtual void | server_is_shutting_down (const char *name) |
| char * | activate_server_by_object (const char *object_name) |
| char * | activate_server_by_name (const char *name, bool manual_start) |
Private Member Functions | |
| char * | activate_server_i (Server_Info &info, bool manual_start) |
| char * | activate_perclient_server_i (Server_Info info, bool manual_start) |
| ImplementationRepository::StartupInfo * | start_server (Server_Info &info, bool manual_start, int &waiting_clients) |
| bool | is_alive (Server_Info &info) |
| int | is_alive_i (Server_Info &info) |
| int | setup_multicast (ACE_Reactor *reactor, const char *ior) |
| void | teardown_multicast () |
| void | unregister_activator_i (const char *activator) |
| Activator_Info_Ptr | get_activator (const ACE_CString &name) |
| void | connect_activator (Activator_Info &info) |
| void | auto_start_servers (void) |
| CORBA::Object_ptr | set_timeout_policy (CORBA::Object_ptr obj, const ACE_Time_Value &to) |
| void | connect_server (Server_Info &info) |
| PortableServer::POA_ptr | findPOA (const char *name) |
Private Attributes | |
| ImR_Forwarder | forwarder_ |
| ImR_Adapter | adapter_ |
| IORTable::Locator_var | ins_locator_ |
| The locator interface for the IORTable. | |
| CORBA::ORB_var | orb_ |
| PortableServer::POA_var | root_poa_ |
| PortableServer::POA_var | imr_poa_ |
| int | debug_ |
| TAO_IOR_Multicast | ior_multicast_ |
| Locator_Repository | repository_ |
| AsyncStartupWaiter_i | waiter_svt_ |
| ImplementationRepository::AsyncStartupWaiter_var | waiter_ |
| bool | read_only_ |
| ACE_Time_Value | startup_timeout_ |
| ACE_Time_Value | ping_interval_ |
Definition at line 36 of file ImR_Locator_i.h.
| ImR_Locator_i::ImR_Locator_i | ( | ) |
Definition at line 56 of file ImR_Locator_i.cpp.
References ACE_NEW, and ins_locator_.
00057 : forwarder_ (*this) 00058 , ins_locator_ (0) 00059 , debug_ (0) 00060 , read_only_ (false) 00061 { 00062 // Visual C++ 6.0 is not smart enough to do a direct assignment 00063 // while allocating the INS_Locator. So, we have to do it in 00064 // two steps. 00065 INS_Locator* locator; 00066 ACE_NEW (locator, 00067 INS_Locator (*this)); 00068 ins_locator_ = locator; 00069 }
| ImR_Locator_i::~ImR_Locator_i | ( | void | ) |
Definition at line 71 of file ImR_Locator_i.cpp.
00072 { 00073 // For some reason g++ 4.0 needs this out-of-line destructor instead 00074 // of the default one generated by the compiler. Without this 00075 // destructor, we get a number of "undefined reference" link errors 00076 // related to the virtual tables of the INS_Locator, ImR_Adapter and 00077 // ImR_Forwarder members in this class. 00078 }
| char * ImR_Locator_i::activate_perclient_server_i | ( | Server_Info | info, | |
| bool | manual_start | |||
| ) | [private] |
Definition at line 546 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, ACE_String_Base< CHAR >::c_str(), debug_, Locator_Repository::get_server(), Server_Info::ior, is_alive(), LM_DEBUG, Server_Info::name, Server_Info::partial_ior, repository_, Server_Info::start_count, Server_Info::start_limit, start_server(), and CORBA::string_dup().
Referenced by activate_server_i().
00547 { 00548 Server_Info_Ptr shared_info = this->repository_.get_server (info.name); 00549 do 00550 { 00551 ImplementationRepository::StartupInfo* psi = 00552 start_server (info, manual_start, shared_info->waiting_clients); 00553 00554 if (psi != 0) 00555 { 00556 ImplementationRepository::StartupInfo_var si = psi; 00557 ACE_ASSERT (info.name == si->name.in ()); 00558 info.partial_ior = si->partial_ior.in (); 00559 info.ior = si->ior.in (); 00560 00561 if (is_alive (info)) 00562 { 00563 if (debug_ > 1) 00564 { 00565 ACE_DEBUG ((LM_DEBUG, "ImR: Successfully activated <%s> at \n\t%s\n", 00566 info.name.c_str (), info.partial_ior.c_str ())); 00567 } 00568 return CORBA::string_dup (info.partial_ior.c_str ()); 00569 } 00570 info.reset (); 00571 } 00572 } while (info.start_count < info.start_limit); 00573 00574 if (this->debug_ > 0) 00575 { 00576 ACE_DEBUG ((LM_DEBUG, 00577 "ImR: Cannot Activate <%s>.\n", info.name.c_str ())); 00578 } 00579 throw ImplementationRepository::CannotActivate( 00580 CORBA::string_dup ( 00581 "Cannot start server.")); 00582 }
| void ImR_Locator_i::activate_server | ( | const char * | name | ) | [virtual] |
Definition at line 455 of file ImR_Locator_i.cpp.
References ACE_DEBUG, activate_server_by_name(), debug_, and LM_DEBUG.
00456 { 00457 if (debug_ > 1) 00458 ACE_DEBUG ((LM_DEBUG, "ImR: Manually activating server <%s>\n", server)); 00459 00460 // This is the version called by tao_imr to activate the server, manually 00461 // starting it if necessary. 00462 CORBA::String_var cleanup = 00463 activate_server_by_name (server, true); 00464 }
| char * ImR_Locator_i::activate_server_by_name | ( | const char * | name, | |
| bool | manual_start | |||
| ) |
Definition at line 467 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_ERROR, activate_server_i(), Locator_Repository::get_server(), LM_ERROR, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), and repository_.
Referenced by activate_server(), activate_server_by_object(), and ImR_Forwarder::preinvoke().
00468 { 00469 // Activate the server, starting it if necessary. Don't start MANUAL 00470 // servers unless manual_start=true 00471 ACE_ASSERT (name != 0); 00472 00473 Server_Info_Ptr info = this->repository_.get_server (name); 00474 if (info.null ()) 00475 { 00476 ACE_ERROR ((LM_ERROR, "ImR: Cannot find info for server <%s>\n", name)); 00477 throw ImplementationRepository::NotFound (); 00478 } 00479 00480 return activate_server_i (*info, manual_start); 00481 }
| char * ImR_Locator_i::activate_server_by_object | ( | const char * | object_name | ) |
Definition at line 484 of file ImR_Locator_i.cpp.
References ACE_ASSERT, activate_server_by_name(), ACE_String_Base< CHAR >::c_str(), ACE_String_Base< CHAR >::find(), ACE_String_Base_Const::npos, and ACE_String_Base< CHAR >::substr().
Referenced by INS_Locator::locate().
00485 { 00486 ACE_ASSERT (object_name != 0); 00487 00488 // We assume that the first part of the object name is the server name. 00489 // So a name of foo/bar means that the server name is foo. 00490 ACE_CString server_name (object_name); 00491 ACE_CString::size_type pos = server_name.find ('/'); 00492 if (pos != ACE_CString::npos) 00493 server_name = server_name.substr (pos + 1); 00494 00495 return activate_server_by_name (server_name.c_str (), false); 00496 }
| char * ImR_Locator_i::activate_server_i | ( | Server_Info & | info, | |
| bool | manual_start | |||
| ) | [private] |
Definition at line 499 of file ImR_Locator_i.cpp.
References ACE_DEBUG, activate_perclient_server_i(), Server_Info::activation_mode, debug_, is_alive(), LM_DEBUG, start_server(), CORBA::string_dup(), AsyncStartupWaiter_i::unblock_all(), and waiter_svt_.
Referenced by activate_server_by_name().
00500 { 00501 if (info.activation_mode == ImplementationRepository::PER_CLIENT) 00502 { 00503 return activate_perclient_server_i (info, manual_start); 00504 } 00505 00506 while (true) 00507 { 00508 if (is_alive (info)) 00509 { 00510 if (debug_ > 1) 00511 { 00512 ACE_DEBUG ((LM_DEBUG, "ImR: Successfully activated <%s> at \n\t%s\n", 00513 info.name.c_str (), info.partial_ior.c_str ())); 00514 } 00515 info.start_count = 0; 00516 00517 waiter_svt_.unblock_all (info.name.c_str ()); 00518 00519 return CORBA::string_dup (info.partial_ior.c_str ()); 00520 } 00521 00522 info.reset (); 00523 00524 if (! info.starting && info.start_count >= info.start_limit) 00525 { 00526 if (this->debug_ > 0) 00527 { 00528 ACE_DEBUG ((LM_DEBUG, 00529 "ImR: Cannot Activate <%s>.\n", info.name.c_str ())); 00530 } 00531 00532 waiter_svt_.unblock_all (info.name.c_str ()); 00533 00534 throw ImplementationRepository::CannotActivate( 00535 CORBA::string_dup ( 00536 "Cannot start server.")); 00537 } 00538 00539 // Note: We already updated info with StartupInfo in server_is_running () 00540 ImplementationRepository::StartupInfo_var si = 00541 start_server (info, manual_start, info.waiting_clients); 00542 } 00543 }
| void ImR_Locator_i::add_or_update_server | ( | const char * | name, | |
| const ImplementationRepository::StartupOptions & | options | |||
| ) | [virtual] |
Definition at line 760 of file ImR_Locator_i.cpp.
References CORBA::SystemException::_tao_minor_code(), ACE_ASSERT, ACE_DEBUG, ImR_Utils::activationModeToString(), Locator_Repository::add_server(), ACE_String_Base< CHAR >::c_str(), CORBA::COMPLETED_NO, debug_, Locator_Repository::get_server(), LM_DEBUG, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), repository_, TAO_IMPLREPO_MINOR_CODE, and Locator_Repository::update_server().
00762 { 00763 ACE_ASSERT (server != 0); 00764 00765 if (this->read_only_) 00766 { 00767 ACE_DEBUG ((LM_DEBUG, "ImR: Cannot add/update server <%s> due to locked database.\n", server)); 00768 throw CORBA::NO_PERMISSION ( 00769 CORBA::SystemException::_tao_minor_code ( 00770 TAO_IMPLREPO_MINOR_CODE, 00771 0), 00772 CORBA::COMPLETED_NO); 00773 } 00774 00775 if (debug_ > 0) 00776 ACE_DEBUG ((LM_DEBUG, "ImR: Add/Update server <%s>.\n", server)); 00777 00778 int limit = options.start_limit; 00779 if (limit < 0) 00780 { 00781 limit = -limit; 00782 } 00783 else if (limit == 0) 00784 { 00785 limit = 1; 00786 } 00787 00788 Server_Info_Ptr info = this->repository_.get_server (server); 00789 if (info.null ()) 00790 { 00791 if (this->debug_ > 1) 00792 ACE_DEBUG ((LM_DEBUG, "ImR: Adding server <%s>.\n", server)); 00793 00794 this->repository_.add_server (server, 00795 options.activator.in (), 00796 options.command_line.in (), 00797 options.environment, 00798 options.working_directory.in (), 00799 options.activation, 00800 limit); 00801 } 00802 else 00803 { 00804 if (this->debug_ > 1) 00805 ACE_DEBUG ((LM_DEBUG, "ImR: Updating server <%s>.\n", server)); 00806 00807 info->activator = options.activator.in (); 00808 info->cmdline = options.command_line.in (); 00809 info->env_vars = options.environment; 00810 info->dir = options.working_directory.in (); 00811 info->activation_mode = options.activation; 00812 info->start_limit = limit; 00813 info->start_count = 0; 00814 int err = this->repository_.update_server (*info); 00815 ACE_ASSERT (err == 0); 00816 ACE_UNUSED_ARG (err); 00817 } 00818 00819 if (this->debug_ > 1) 00820 { 00821 // Note : The info var may be null, so we use options. 00822 ACE_DEBUG ((LM_DEBUG, "ImR: Server: %s\n" 00823 "\tActivator: %s\n" 00824 "\tCommand Line: %s\n" 00825 "\tWorking Directory: %s\n" 00826 "\tActivation: %s\n" 00827 "\tStart Limit: %d\n" 00828 "\n", 00829 server, 00830 options.activator.in (), 00831 options.command_line.in (), 00832 options.working_directory.in (), 00833 ImR_Utils::activationModeToString (options.activation).c_str (), 00834 limit 00835 )); 00836 00837 for (CORBA::ULong i = 0; i < options.environment.length (); ++i) 00838 ACE_DEBUG ((LM_DEBUG, "Environment variable %s=%s\n", 00839 options.environment[i].name.in (), 00840 options.environment[i].value.in ())); 00841 } 00842 }
| void ImR_Locator_i::auto_start_servers | ( | void | ) | [private] |
Definition at line 1200 of file ImR_Locator_i.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_ASSERT, ACE_DEBUG, and LM_DEBUG.
Referenced by run().
01201 { 01202 if (this->repository_.servers ().current_size () == 0) 01203 return; 01204 01205 Locator_Repository::SIMap::ENTRY* server_entry; 01206 Locator_Repository::SIMap::ITERATOR server_iter (this->repository_.servers ()); 01207 01208 // For each of the entries in the Locator_Repository, get the startup 01209 // information and activate the servers, if they are not already 01210 // running. 01211 for (;server_iter.next (server_entry) != 0; server_iter.advance ()) 01212 { 01213 Server_Info_Ptr info = server_entry->int_id_; 01214 ACE_ASSERT (! info.null ()); 01215 01216 try 01217 { 01218 if (info->activation_mode == ImplementationRepository::AUTO_START 01219 && info->cmdline.length () > 0) 01220 { 01221 CORBA::String_var cleanup = 01222 this->activate_server_i (*info, true); 01223 } 01224 } 01225 catch (const CORBA::Exception& ex) 01226 { 01227 if (this->debug_ > 1) 01228 { 01229 ACE_DEBUG ((LM_DEBUG, 01230 "ImR: AUTO_START Could not activate <%s>\n", 01231 server_entry->ext_id_.c_str ())); 01232 ex._tao_print_exception ("AUTO_START"); 01233 } 01234 // Ignore exceptions 01235 } 01236 } 01237 }
| void ImR_Locator_i::connect_activator | ( | Activator_Info & | info | ) | [private] |
Definition at line 1160 of file ImR_Locator_i.cpp.
References ACE_DEBUG, Activator_Info::activator, ACE_String_Base< CHAR >::c_str(), debug_, TAO_Pseudo_Var_T< T >::in(), Activator_Info::ior, CORBA::is_nil(), ACE_String_Base< CHAR >::length(), LM_DEBUG, Activator_Info::name, orb_, Activator_Info::reset(), set_timeout_policy(), startup_timeout_, and ACE_Time_Value::zero.
Referenced by shutdown().
01161 { 01162 if (! CORBA::is_nil (info.activator.in ()) || info.ior.length () == 0) 01163 return; 01164 01165 try 01166 { 01167 CORBA::Object_var obj = 01168 this->orb_->string_to_object (info.ior.c_str ()); 01169 01170 if (CORBA::is_nil (obj.in ())) 01171 { 01172 info.reset (); 01173 return; 01174 } 01175 01176 if (startup_timeout_ > ACE_Time_Value::zero) 01177 { 01178 obj = set_timeout_policy (obj.in (), startup_timeout_); 01179 } 01180 01181 info.activator = 01182 ImplementationRepository::Activator::_unchecked_narrow (obj.in ()); 01183 01184 if (CORBA::is_nil (info.activator.in ())) 01185 { 01186 info.reset (); 01187 return; 01188 } 01189 01190 if (debug_ > 1) 01191 ACE_DEBUG ((LM_DEBUG, "ImR: Connected to activator <%s>\n", info.name.c_str ())); 01192 } 01193 catch (const CORBA::Exception&) 01194 { 01195 info.reset (); 01196 } 01197 }
| void ImR_Locator_i::connect_server | ( | Server_Info & | info | ) | [private] |
Definition at line 1240 of file ImR_Locator_i.cpp.
References ACE_DEBUG, ACE_String_Base< CHAR >::c_str(), debug_, DEFAULT_SERVER_TIMEOUT, TAO_Pseudo_Var_T< T >::in(), Server_Info::ior, CORBA::is_nil(), ACE_String_Base< CHAR >::length(), LM_DEBUG, Server_Info::name, orb_, Server_Info::reset(), Server_Info::server, and set_timeout_policy().
Referenced by is_alive_i(), and shutdown_server().
01241 { 01242 if (! CORBA::is_nil (info.server.in ())) 01243 { 01244 return; // already connected 01245 } 01246 01247 if (info.ior.length () == 0) 01248 { 01249 info.reset (); 01250 return; // can't connect 01251 } 01252 01253 try 01254 { 01255 CORBA::Object_var obj = orb_->string_to_object (info.ior.c_str ()); 01256 01257 if (CORBA::is_nil (obj.in ())) 01258 { 01259 info.reset (); 01260 return; 01261 } 01262 01263 obj = set_timeout_policy (obj.in (), DEFAULT_SERVER_TIMEOUT); 01264 01265 info.server = 01266 ImplementationRepository::ServerObject::_unchecked_narrow (obj.in ()); 01267 01268 if (CORBA::is_nil (info.server.in ())) 01269 { 01270 info.reset (); 01271 return; 01272 } 01273 01274 if (debug_ > 1) 01275 ACE_DEBUG ((LM_DEBUG, "ImR: Connected to server <%s>\n", info.name.c_str ())); 01276 } 01277 catch (const CORBA::Exception&) 01278 { 01279 info.reset (); 01280 } 01281 }
| int ImR_Locator_i::debug | ( | ) | const |
Definition at line 1470 of file ImR_Locator_i.cpp.
References debug_.
Referenced by INS_Locator::locate(), ImR_Forwarder::preinvoke(), and run().
01471 { 01472 return debug_; 01473 }
| void ImR_Locator_i::find | ( | const char * | name, | |
| ImplementationRepository::ServerInformation_out | info | |||
| ) | [virtual] |
Definition at line 1058 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, ACE_NEW_THROW_EX, debug_, Locator_Repository::get_server(), LM_DEBUG, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), and repository_.
01060 { 01061 ACE_ASSERT (server != 0); 01062 ACE_NEW_THROW_EX (imr_info, ImplementationRepository::ServerInformation, CORBA::NO_MEMORY ()); 01063 01064 Server_Info_Ptr info = this->repository_.get_server (server); 01065 if (! info.null ()) 01066 { 01067 imr_info = info->createImRServerInfo (); 01068 01069 if (this->debug_ > 1) 01070 ACE_DEBUG ((LM_DEBUG, "ImR: Found server %s.\n", server)); 01071 } 01072 else 01073 { 01074 if (debug_ > 1) 01075 ACE_DEBUG ((LM_DEBUG, "ImR: Cannot find server <%s>\n", server)); 01076 } 01077 }
| PortableServer::POA_ptr ImR_Locator_i::findPOA | ( | const char * | name | ) | [private] |
Definition at line 891 of file ImR_Locator_i.cpp.
References root_poa_.
Referenced by remove_server().
00892 { 00893 try 00894 { 00895 bool activate_it = false; 00896 return root_poa_->find_POA (name, activate_it); 00897 } 00898 catch (const CORBA::Exception&) 00899 {// Ignore 00900 } 00901 return PortableServer::POA::_nil (); 00902 }
| int ImR_Locator_i::fini | ( | void | ) |
Cleans up any state created by init*.
Definition at line 276 of file ImR_Locator_i.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_DEBUG, debug_, LM_DEBUG, orb_, root_poa_, and teardown_multicast().
Referenced by ImR_Locator_Loader::fini(), and run_standalone().
00277 { 00278 try 00279 { 00280 if (debug_ > 1) 00281 ACE_DEBUG ((LM_DEBUG, "ImR: Shutting down...\n")); 00282 00283 teardown_multicast (); 00284 00285 this->root_poa_->destroy (1, 1); 00286 00287 this->orb_->destroy (); 00288 00289 if (debug_ > 0) 00290 ACE_DEBUG ((LM_DEBUG, "ImR: Shut down successfully.\n")); 00291 } 00292 catch (const CORBA::Exception& ex) 00293 { 00294 ex._tao_print_exception ("ImR_Locator_i::fini"); 00295 throw; 00296 } 00297 return 0; 00298 }
| Activator_Info_Ptr ImR_Locator_i::get_activator | ( | const ACE_CString & | name | ) | [private] |
Definition at line 1149 of file ImR_Locator_i.cpp.
References Locator_Repository::get_activator(), ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), and repository_.
Referenced by start_server(), and unregister_activator().
01150 { 01151 Activator_Info_Ptr info = this->repository_.get_activator (aname); 01152 if (! info.null ()) 01153 { 01154 this->connect_activator (*info); 01155 } 01156 return info; 01157 }
| int ImR_Locator_i::init | ( | Options & | opts | ) |
Initialize the service, creating its own orb, poa, etc.
Definition at line 173 of file ImR_Locator_i.cpp.
References ACE_String_Base< CHAR >::c_str(), Options::cmdline(), TAO_Pseudo_Var_T< T >::in(), init_with_orb(), and CORBA::ORB_init().
Referenced by ImR_Locator_Loader::init(), and run_standalone().
00174 { 00175 ACE_CString cmdline = opts.cmdline (); 00176 cmdline += " -orbcollocation no -orbuseimr 0"; 00177 ACE_ARGV av (cmdline.c_str ()); 00178 int argc = av.argc (); 00179 char** argv = av.argv (); 00180 00181 CORBA::ORB_var orb = CORBA::ORB_init (argc, argv, "TAO_ImR_Locator"); 00182 int err = this->init_with_orb (orb.in (), opts); 00183 return err; 00184 }
| int ImR_Locator_i::init_with_orb | ( | CORBA::ORB_ptr | orb, | |
| Options & | opts | |||
| ) |
Same as above, but use the given orb.
Definition at line 81 of file ImR_Locator_i.cpp.
References CORBA::ORB::_duplicate(), ACE_ASSERT, ACE_ERROR_RETURN, adapter_, ACE_String_Base< CHAR >::c_str(), createPersistentPOA(), AsyncStartupWaiter_i::debug(), Options::debug(), debug_, ACE_OS::fclose(), ACE_OS::fopen(), forwarder_, ACE_OS::fprintf(), imr_poa_, TAO_Pseudo_Var_T< T >::in(), Locator_Repository::init(), ImR_Adapter::init(), ImR_Forwarder::init(), Options::ior_filename(), CORBA::is_nil(), ACE_String_Base< CHAR >::length(), LM_ERROR, Options::multicast(), orb_, CORBA::ORB::orb_core(), Options::ping_interval(), ping_interval_, TAO_ORB_Core::reactor(), read_only_, Options::readonly(), repository_, CORBA::ORB::resolve_initial_references(), root_poa_, set_timeout_policy(), Options::startup_timeout(), startup_timeout_, PortableServer::string_to_ObjectId(), waiter_, waiter_svt_, and ACE_Time_Value::zero.
Referenced by init().
00082 { 00083 orb_ = CORBA::ORB::_duplicate (orb); 00084 debug_ = opts.debug (); 00085 read_only_ = opts.readonly (); 00086 startup_timeout_ = opts.startup_timeout (); 00087 ping_interval_ = opts.ping_interval (); 00088 00089 CORBA::Object_var obj = 00090 this->orb_->resolve_initial_references ("RootPOA"); 00091 this->root_poa_ = PortableServer::POA::_narrow (obj.in ()); 00092 ACE_ASSERT (! CORBA::is_nil (this->root_poa_.in ())); 00093 00094 this->forwarder_.init (orb); 00095 this->adapter_.init (& this->forwarder_); 00096 00097 // Register the Adapter_Activator reference to be the RootPOA's 00098 // Adapter Activator. 00099 root_poa_->the_activator (&this->adapter_); 00100 00101 // Use a persistent POA so that any IOR 00102 this->imr_poa_ = createPersistentPOA (this->root_poa_.in (), 00103 "ImplRepo_Service"); 00104 ACE_ASSERT (! CORBA::is_nil (this->imr_poa_.in ())); 00105 00106 waiter_svt_.debug (debug_ > 1); 00107 PortableServer::ObjectId_var id = PortableServer::string_to_ObjectId ("ImR_AsyncStartupWaiter"); 00108 this->imr_poa_->activate_object_with_id (id.in (), &waiter_svt_); 00109 obj = this->imr_poa_->id_to_reference (id.in ()); 00110 if (startup_timeout_ > ACE_Time_Value::zero) 00111 { 00112 obj = set_timeout_policy (obj.in (), startup_timeout_); 00113 } 00114 waiter_ = ImplementationRepository::AsyncStartupWaiter::_narrow (obj.in ()); 00115 00116 id = PortableServer::string_to_ObjectId ("ImplRepo_Service"); 00117 this->imr_poa_->activate_object_with_id (id.in (), this); 00118 00119 obj = this->imr_poa_->id_to_reference (id.in ()); 00120 CORBA::String_var ior = this->orb_->object_to_string (obj.in ()); 00121 00122 // Register the ImR for use with INS 00123 obj = orb->resolve_initial_references ("IORTable"); 00124 IORTable::Table_var ior_table = IORTable::Table::_narrow (obj.in ()); 00125 ACE_ASSERT (! CORBA::is_nil (ior_table.in ())); 00126 ior_table->bind ("ImplRepoService", ior.in ()); 00127 ior_table->bind ("ImR", ior.in ()); 00128 ior_table->set_locator (this->ins_locator_.in ()); 00129 00130 // Set up multicast support (if enabled) 00131 if (opts.multicast ()) 00132 { 00133 ACE_Reactor* reactor = orb->orb_core ()->reactor (); 00134 if (this->setup_multicast (reactor, ior.in ()) != 0) 00135 return -1; 00136 } 00137 00138 // Initialize the persistent storage. This will load any values that 00139 // may have been persisted before. 00140 // The init can return 1 if there is no persistent file yet. In 00141 // that case, we need not do anything for now. 00142 int init_result = 00143 this->repository_.init (opts); 00144 if (init_result == -1) 00145 { 00146 ACE_ERROR_RETURN ((LM_ERROR, "Repository failed to initialize\n"), -1); 00147 } 00148 00149 // Activate the two poa managers 00150 PortableServer::POAManager_var poaman = 00151 this->root_poa_->the_POAManager (); 00152 poaman->activate (); 00153 poaman = this->imr_poa_->the_POAManager (); 00154 poaman->activate (); 00155 00156 // We write the ior file last so that the tests can know we are ready. 00157 if (opts.ior_filename ().length () > 0) 00158 { 00159 FILE* fp = ACE_OS::fopen (opts.ior_filename ().c_str (), "w"); 00160 if (fp == 0) 00161 { 00162 ACE_ERROR_RETURN ((LM_ERROR, 00163 "ImR: Could not open file: %s\n", opts.ior_filename ().c_str ()), -1); 00164 } 00165 ACE_OS::fprintf (fp, "%s", ior.in ()); 00166 ACE_OS::fclose (fp); 00167 } 00168 00169 return 0; 00170 }
| bool ImR_Locator_i::is_alive | ( | Server_Info & | info | ) | [private] |
Definition at line 1284 of file ImR_Locator_i.cpp.
References ACE_DEBUG, ACE_String_Base< CHAR >::c_str(), debug_, ACE_OS::gettimeofday(), Server_Info::last_ping, LM_DEBUG, Server_Info::name, orb_, and PING_RETRY_SCHEDULE.
Referenced by activate_perclient_server_i(), and activate_server_i().
01285 { 01286 const size_t table_size = sizeof (PING_RETRY_SCHEDULE) / 01287 sizeof (*PING_RETRY_SCHEDULE); 01288 01289 for (size_t i = 0; i < table_size; ++i) 01290 { 01291 int status = this->is_alive_i (info); 01292 if (status == 0) 01293 return false; 01294 if (status == 1) 01295 return true; 01296 01297 // This is evil, but there's not much else we can do for now. We 01298 // should never reach this code once the ImR Servers are fixed 01299 // so that they don't lie about server_is_running. Currently, 01300 // they send this notification during poa creation. We have to 01301 // run the orb, because the very thing that may be slowing the 01302 // aliveness of the servers is the fact that they're trying to 01303 // register more objects with us. In practical testing, we 01304 // never retried the ping more than once, because the second 01305 // ping always timed out, even if the servers poa manager had 01306 // not been activated. The only way we saw multiple retries was 01307 // if we ran the orb on the server before the poa manager was 01308 // activated. For this reason, the first retry is immediate, 01309 // and the orb->run () call is not required. The call will 01310 // likely timeout, and is_alive will return true. 01311 if (PING_RETRY_SCHEDULE[i] > 0) 01312 { 01313 ACE_Time_Value tv (0, PING_RETRY_SCHEDULE[i] * 1000); 01314 this->orb_->run (tv); 01315 } 01316 } 01317 if (debug_ > 0) 01318 { 01319 ACE_DEBUG ((LM_DEBUG, 01320 "ImR: <%s> Ping retry count exceeded. alive=maybe.\n", info.name.c_str ())); 01321 } 01322 // We return true here, because the server *might* be alive, it's just not starting in a timely 01323 // manner. We can't return false, because then we'll just try to start another instance, and the 01324 // same thing will likely happen. 01325 info.last_ping = ACE_OS::gettimeofday (); 01326 return true; 01327 }
| int ImR_Locator_i::is_alive_i | ( | Server_Info & | info | ) | [private] |
Definition at line 1330 of file ImR_Locator_i.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_DEBUG, Server_Info::activator, ACE_String_Base< CHAR >::c_str(), Server_Info::cmdline, connect_server(), debug_, ACE_OS::gettimeofday(), Locator_Repository::has_activator(), Server_Info::ior, CORBA::is_nil(), Server_Info::last_ping, ACE_String_Base< CHAR >::length(), LM_DEBUG, Server_Info::name, Server_Info::partial_ior, ping_interval_, repository_, Server_Info::server, TAO_INVOCATION_SEND_REQUEST_MINOR_CODE, TAO_POA_DISCARDING, TAO_POA_HOLDING, and ACE_Time_Value::zero.
01331 { 01332 // This is used by the ACE_TRY below when exceptions are turned off. 01333 01334 if (info.ior.length () == 0 || info.partial_ior.length () == 0) 01335 { 01336 if (debug_ > 1) 01337 { 01338 ACE_DEBUG ((LM_DEBUG, 01339 "ImR: <%s> not running. alive=false.\n", info.name.c_str ())); 01340 } 01341 info.last_ping = ACE_Time_Value::zero; 01342 return 0; 01343 } 01344 01345 if (ping_interval_ == ACE_Time_Value::zero) 01346 { 01347 if (debug_ > 1) 01348 { 01349 ACE_DEBUG ((LM_DEBUG, 01350 "ImR: <%s> Ping verification disabled. alive=true.\n", info.name.c_str ())); 01351 } 01352 return 1; 01353 } 01354 01355 if ((ACE_OS::gettimeofday () - info.last_ping) < ping_interval_) 01356 { 01357 if (debug_ > 1) 01358 { 01359 ACE_DEBUG ((LM_DEBUG, 01360 "ImR: <%s> within ping interval. alive=true.\n", info.name.c_str ())); 01361 } 01362 return 1; 01363 } 01364 01365 // If we don't have enough information to start the server if it isn't already 01366 // then we might as well assume it is running. That way the client can get the 01367 // status directly from the server. 01368 if (info.cmdline.length () == 0 || ! repository_.has_activator (info.activator)) 01369 { 01370 if (debug_ > 1) 01371 { 01372 ACE_DEBUG ((LM_DEBUG, 01373 "ImR: Ping verification skipped. <%s> not startable.\n", info.name.c_str ())); 01374 } 01375 return 1; 01376 } 01377 01378 connect_server (info); 01379 01380 if (CORBA::is_nil (info.server.in ())) 01381 { 01382 if (debug_ > 1) 01383 { 01384 ACE_DEBUG ((LM_DEBUG, 01385 "ImR: <%s> Could not connect. alive=false.\n", info.name.c_str ())); 01386 } 01387 return 0; 01388 } 01389 01390 try 01391 { 01392 // Make a copy, in case the info is updated during the ping. 01393 ImplementationRepository::ServerObject_var server = info.server; 01394 01395 // This will timeout if it takes too long 01396 server->ping (); 01397 01398 if (debug_ > 1) 01399 { 01400 ACE_DEBUG ((LM_DEBUG, 01401 "ImR: <%s> Ping successful. alive=true\n", info.name.c_str ())); 01402 } 01403 info.last_ping = ACE_OS::gettimeofday (); 01404 } 01405 catch (const CORBA::TRANSIENT& ex) 01406 { 01407 const CORBA::ULong BITS_5_THRU_12_MASK = 0x00000f80; 01408 switch (ex.minor () & BITS_5_THRU_12_MASK) 01409 { 01410 case TAO_INVOCATION_SEND_REQUEST_MINOR_CODE: 01411 { 01412 if (debug_ > 1) 01413 { 01414 ACE_DEBUG ((LM_DEBUG, 01415 "ImR: <%s> Local TRANSIENT. alive=false.\n", info.name.c_str ())); 01416 } 01417 } 01418 info.last_ping = ACE_Time_Value::zero; 01419 return 0; 01420 case TAO_POA_DISCARDING: 01421 case TAO_POA_HOLDING: 01422 { 01423 if (debug_ > 1) 01424 { 01425 ACE_DEBUG ((LM_DEBUG, 01426 "ImR: <%s> Remote TRANSIENT. alive=maybe.\n", info.name.c_str ())); 01427 } 01428 } 01429 return -1; // We keep trying to ping, because returning 1 now, would just lead 01430 // to clients getting the same exception. If we can't ping after several 01431 // attempts, then we'll give up and return 1, letting the client worry about it. 01432 default: 01433 { 01434 if (debug_ > 1) 01435 { 01436 ACE_DEBUG ((LM_DEBUG, 01437 "ImR: <%s> TRANSIENT exception. alive=false.\n", info.name.c_str ())); 01438 } 01439 info.last_ping = ACE_Time_Value::zero; 01440 } 01441 return 0; 01442 } 01443 } 01444 catch (const CORBA::TIMEOUT&) 01445 { 01446 if (debug_ > 1) 01447 { 01448 ACE_DEBUG ((LM_DEBUG, 01449 "ImR: <%s> Ping timed out. alive=true.\n", info.name.c_str ())); 01450 } 01451 return 1; // This is "alive" as far as we're concerned. Presumably the client 01452 // will have a less stringent timeout policy, or will want to know 01453 // about the timeout. In any case, we're only guaranteeing that the 01454 // server is alive, not that it's responsive. 01455 } 01456 catch (const CORBA::Exception& ex) 01457 { 01458 if (debug_ > 1) 01459 { 01460 ACE_DEBUG ((LM_DEBUG, "ImR: <%s> Unexpected Ping exception. alive=false\n", info.name.c_str ())); 01461 ex._tao_print_exception ("\n"); 01462 } 01463 info.last_ping = ACE_Time_Value::zero; 01464 return false; 01465 } 01466 return 1; 01467 }
| void ImR_Locator_i::list | ( | CORBA::ULong | how_many, | |
| ImplementationRepository::ServerInformationList_out | server_list, | |||
| ImplementationRepository::ServerInformationIterator_out | server_iterator | |||
| ) | [virtual] |
Definition at line 1080 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, ACE_NEW_THROW_EX, imr_poa_, TAO_Pseudo_Var_T< T >::in(), LM_DEBUG, repository_, and Locator_Repository::servers().
01083 { 01084 if (this->debug_ > 1) 01085 ACE_DEBUG ((LM_DEBUG, "ImR: List servers.\n")); 01086 01087 // Initialize the out variables, so if we return early, they will 01088 // not be dangling. 01089 server_iterator = ImplementationRepository::ServerInformationIterator::_nil (); 01090 ACE_NEW_THROW_EX (server_list, 01091 ImplementationRepository::ServerInformationList (0), CORBA::NO_MEMORY ()); 01092 01093 Locator_Repository::SIMap::ENTRY* entry = 0; 01094 Locator_Repository::SIMap::ITERATOR it (this->repository_.servers ()); 01095 01096 // Number of servers that will go into the server_list. 01097 CORBA::ULong n = this->repository_.servers ().current_size (); 01098 if (how_many > 0 && n > how_many) 01099 { 01100 n = how_many; 01101 } 01102 01103 server_list->length (n); 01104 01105 if (this->debug_ > 1) 01106 ACE_DEBUG ((LM_DEBUG, "ImR_Locator_i::list: Filling ServerList with %d servers\n", n)); 01107 01108 for (CORBA::ULong i = 0; i < n; i++) 01109 { 01110 it.next (entry); 01111 it.advance (); 01112 ACE_ASSERT (entry != 0); 01113 01114 Server_Info_Ptr info = entry->int_id_; 01115 01116 ImplementationRepository::ServerInformation_var imr_info = info->createImRServerInfo (); 01117 server_list[i] = *imr_info; 01118 } 01119 01120 if (this->repository_.servers ().current_size () > n) 01121 { 01122 if (this->debug_ > 1) 01123 ACE_DEBUG ((LM_DEBUG, "ImR_Locator_i::list: Creating ServerInformation Iterator\n")); 01124 01125 ImR_Iterator* imr_iter = 0; 01126 01127 ACE_NEW_THROW_EX (imr_iter, 01128 ImR_Iterator (n, this->repository_, this->imr_poa_.in ()), 01129 CORBA::NO_MEMORY ()); 01130 01131 PortableServer::ServantBase_var tmp (imr_iter); 01132 01133 try 01134 { 01135 PortableServer::ObjectId_var id = 01136 this->imr_poa_->activate_object (imr_iter); 01137 CORBA::Object_var obj = this->imr_poa_->id_to_reference (id.in ()); 01138 server_iterator = ImplementationRepository:: 01139 ServerInformationIterator::_unchecked_narrow (obj.in ()); 01140 } 01141 catch (const CORBA::Exception&) 01142 { 01143 throw; 01144 } 01145 } 01146 }
| void ImR_Locator_i::notify_child_death | ( | const char * | name | ) | [virtual] |
Definition at line 429 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, Locator_Repository::get_server(), LM_DEBUG, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), and repository_.
00430 { 00431 ACE_ASSERT (name != 0); 00432 00433 if (this->debug_ > 1) 00434 ACE_DEBUG ((LM_DEBUG, "ImR: Server has died <%s>.\n", name)); 00435 00436 Server_Info_Ptr info = this->repository_.get_server (name); 00437 if (! info.null ()) 00438 { 00439 info->ior = ""; 00440 info->partial_ior = ""; 00441 00442 int err = this->repository_.update_server (*info); 00443 ACE_ASSERT (err == 0); 00444 ACE_UNUSED_ARG (err); 00445 } 00446 else 00447 { 00448 if (this->debug_ > 1) 00449 ACE_DEBUG ((LM_DEBUG, 00450 "ImR: Failed to find server in repository.\n")); 00451 } 00452 }
| CORBA::Long ImR_Locator_i::register_activator | ( | const char * | name, | |
| ImplementationRepository::Activator_ptr | admin | |||
| ) | [virtual] |
Definition at line 368 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, Locator_Repository::add_activator(), ACE_OS::gettimeofday(), CORBA::is_nil(), LM_DEBUG, ACE_Time_Value::msec(), orb_, repository_, and unregister_activator_i().
00370 { 00371 ACE_ASSERT (aname != 0); 00372 ACE_ASSERT (! CORBA::is_nil (activator)); 00373 00374 // Before we can register the activator, we need to ensure that any existing 00375 // registration is purged. 00376 this->unregister_activator_i (aname); 00377 00378 CORBA::String_var ior = 00379 this->orb_->object_to_string (activator); 00380 00381 CORBA::Long token = ACE_OS::gettimeofday ().msec (); 00382 00383 int err = this->repository_.add_activator (aname, token, ior.in (), activator); 00384 ACE_ASSERT (err == 0); 00385 ACE_UNUSED_ARG (err); 00386 00387 if (this->debug_ > 0) 00388 ACE_DEBUG ((LM_DEBUG, "ImR: Activator registered for %s.\n", aname)); 00389 00390 return token; 00391 }
| void ImR_Locator_i::remove_server | ( | const char * | name | ) | [virtual] |
Definition at line 845 of file ImR_Locator_i.cpp.
References CORBA::SystemException::_tao_minor_code(), ACE_ASSERT, ACE_DEBUG, ACE_ERROR, CORBA::COMPLETED_NO, findPOA(), Locator_Repository::get_server(), TAO_Objref_Var_T< T >::in(), CORBA::is_nil(), LM_DEBUG, LM_ERROR, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), repository_, TAO_IMPLREPO_MINOR_CODE, and wait().
00846 { 00847 ACE_ASSERT (name != 0); 00848 if (this->read_only_) 00849 { 00850 ACE_ERROR ((LM_ERROR, 00851 "ImR: Can't remove server <%s> due to locked database.\n", name)); 00852 throw CORBA::NO_PERMISSION ( 00853 CORBA::SystemException::_tao_minor_code ( 00854 TAO_IMPLREPO_MINOR_CODE, 00855 0), 00856 CORBA::COMPLETED_NO); 00857 } 00858 00859 // Note : This will be safe, because any Server_Info_Ptr objects will still 00860 // be valid, and the actual Server_Info will be destroyed when the last 00861 // one goes out of scope. 00862 00863 Server_Info_Ptr info = this->repository_.get_server (name); 00864 if (! info.null ()) 00865 { 00866 if (this->repository_.remove_server (name) == 0) 00867 { 00868 if (this->debug_ > 1) 00869 ACE_DEBUG ((LM_DEBUG, "ImR: Removing Server <%s>...\n", name)); 00870 00871 PortableServer::POA_var poa = findPOA (name); 00872 if (! CORBA::is_nil (poa.in ())) 00873 { 00874 bool etherealize = true; 00875 bool wait = false; 00876 poa->destroy (etherealize, wait); 00877 } 00878 if (this->debug_ > 0) 00879 ACE_DEBUG ((LM_DEBUG, "ImR: Removed Server <%s>.\n", name)); 00880 } 00881 } 00882 else 00883 { 00884 ACE_ERROR ((LM_ERROR, 00885 "ImR: Can't remove unknown server <%s>.\n", name)); 00886 throw ImplementationRepository::NotFound (); 00887 } 00888 }
| int ImR_Locator_i::run | ( | void | ) |
Run using the orb reference created during init().
Definition at line 187 of file ImR_Locator_i.cpp.
References ACE_DEBUG, auto_start_servers(), debug(), debug_, ior_multicast_, LM_DEBUG, ACE_Time_Value::msec(), orb_, ping_interval_, read_only_, Locator_Repository::repo_mode(), repository_, ACE_Time_Value::sec(), and startup_timeout_.
Referenced by ImR_Locator_Loader::run(), and run_standalone().
00188 { 00189 if (debug_ > 0) 00190 { 00191 // This debug message was split into two calls to 00192 // work around yet another bug in Visual Studio 2005. 00193 // When this was a single debug message, the value for 00194 // debug () came out garbled and the read-only string 00195 // caused an ACCESS VIOLATION -- Chad Elliott 10/4/2006 00196 ACE_DEBUG ((LM_DEBUG, 00197 "Implementation Repository: Running\n" 00198 "\tPing Interval : %dms\n" 00199 "\tStartup Timeout : %ds\n" 00200 "\tPersistence : %s\n" 00201 "\tMulticast : %s\n", 00202 ping_interval_.msec (), 00203 startup_timeout_.sec (), 00204 repository_.repo_mode (), 00205 ior_multicast_.reactor () != 0 ? "Enabled" : "Disabled")); 00206 ACE_DEBUG ((LM_DEBUG, 00207 "\tDebug : %d\n" 00208 "\tLocked : %s\n\n", 00209 debug (), 00210 read_only_ ? "True" : "False")); 00211 } 00212 this->auto_start_servers (); 00213 00214 this->orb_->run (); 00215 return 0; 00216 }
| void ImR_Locator_i::server_is_running | ( | const char * | name, | |
| const char * | partial_ior, | |||
| ImplementationRepository::ServerObject_ptr | server_object | |||
| ) | [virtual] |
Definition at line 968 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, ACE_TEXT(), Locator_Repository::add_server(), DEFAULT_START_LIMIT, Locator_Repository::get_server(), CORBA::is_nil(), LM_DEBUG, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), orb_, repository_, AsyncStartupWaiter_i::unblock_one(), Locator_Repository::update_server(), and waiter_svt_.
00971 { 00972 ACE_ASSERT (name != 0); 00973 ACE_ASSERT (partial_ior != 0); 00974 ACE_ASSERT (! CORBA::is_nil (server)); 00975 00976 if (this->debug_ > 0) 00977 ACE_DEBUG ((LM_DEBUG, "ImR: Server %s is running at %s.\n", name, partial_ior)); 00978 00979 CORBA::String_var ior = orb_->object_to_string (server); 00980 00981 if (this->debug_ > 1) 00982 ACE_DEBUG ((LM_DEBUG, "ImR: Server %s callback at %s.\n", name, ior.in ())); 00983 00984 Server_Info_Ptr info = this->repository_.get_server (name); 00985 if (info.null ()) 00986 { 00987 if (this->debug_ > 0) 00988 ACE_DEBUG ((LM_DEBUG, "ImR: Auto adding NORMAL server <%s>.\n", name)); 00989 00990 ImplementationRepository::EnvironmentList env (0); 00991 this->repository_.add_server (name, 00992 "", // no activator 00993 "", // no cmdline 00994 ImplementationRepository::EnvironmentList (), 00995 "", // no working dir 00996 ImplementationRepository::NORMAL, 00997 DEFAULT_START_LIMIT, 00998 partial_ior, 00999 ior.in (), 01000 ImplementationRepository::ServerObject::_nil () // Will connect at first access 01001 ); 01002 } 01003 else 01004 { 01005 if (info->activation_mode != ImplementationRepository::PER_CLIENT) { 01006 info->ior = ior.in (); 01007 info->partial_ior = partial_ior; 01008 info->server = ImplementationRepository::ServerObject::_nil (); // Will connect at first access 01009 01010 int err = this->repository_.update_server (*info); 01011 ACE_ASSERT (err == 0); 01012 ACE_UNUSED_ARG (err); 01013 01014 waiter_svt_.unblock_one (name, partial_ior, ior.in (), false); 01015 } else { 01016 // Note : There's no need to unblock all the waiting request until 01017 // we know the final status of the server. 01018 if (info->waiting_clients > 0) 01019 { 01020 waiter_svt_.unblock_one (name, partial_ior, ior.in (), true); 01021 } 01022 else if (this->debug_ > 1) 01023 { 01024 ACE_DEBUG ((LM_DEBUG, 01025 ACE_TEXT ("ImR - Ignoring server_is_running due to no ") 01026 ACE_TEXT ("waiting PER_CLIENT clients.\n"))); 01027 } 01028 } 01029 } 01030 }
| void ImR_Locator_i::server_is_shutting_down | ( | const char * | name | ) | [virtual] |
Definition at line 1033 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, Locator_Repository::get_server(), LM_DEBUG, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), repository_, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::reset(), and Locator_Repository::update_server().
01034 { 01035 ACE_ASSERT (server != 0); 01036 Server_Info_Ptr info = this->repository_.get_server (server); 01037 if (info.null ()) 01038 { 01039 if (this->debug_ > 1) 01040 { 01041 ACE_DEBUG ((LM_DEBUG, 01042 "ImR_Locator_i::server_is_shutting_down: Unknown server:%s\n", server)); 01043 } 01044 return; 01045 } 01046 01047 if (this->debug_ > 0) 01048 ACE_DEBUG ((LM_DEBUG, "ImR: Server <%s> is shutting down.\n", server)); 01049 01050 info->reset (); 01051 01052 int err = this->repository_.update_server (*info); 01053 ACE_ASSERT (err == 0); 01054 ACE_UNUSED_ARG (err); 01055 }
| CORBA::Object_ptr ImR_Locator_i::set_timeout_policy | ( | CORBA::Object_ptr | obj, | |
| const ACE_Time_Value & | to | |||
| ) | [private] |
Definition at line 722 of file ImR_Locator_i.cpp.
References CORBA::Object::_duplicate(), TAO_Pseudo_Var_T< T >::_retn(), CORBA::Exception::_tao_print_exception(), ACE_DEBUG, TAO_Pseudo_Var_T< T >::in(), CORBA::is_nil(), LM_DEBUG, and orb_.
Referenced by connect_activator(), connect_server(), init_with_orb(), and shutdown_server().
00723 { 00724 CORBA::Object_var ret (CORBA::Object::_duplicate (obj)); 00725 00726 try 00727 { 00728 TimeBase::TimeT timeout; 00729 ORBSVCS_Time::Time_Value_to_TimeT (timeout, to); 00730 CORBA::Any tmp; 00731 tmp <<= timeout; 00732 00733 CORBA::PolicyList policies (1); 00734 policies.length (1); 00735 policies[0] = orb_->create_policy (Messaging::RELATIVE_RT_TIMEOUT_POLICY_TYPE, tmp); 00736 00737 ret = obj->_set_policy_overrides (policies, CORBA::ADD_OVERRIDE); 00738 00739 policies[0]->destroy (); 00740 00741 if (CORBA::is_nil (ret.in ())) 00742 { 00743 if (this->debug_ > 0) 00744 { 00745 ACE_DEBUG ((LM_DEBUG, "ImR: Unable to set timeout policy.\n")); 00746 } 00747 ret = CORBA::Object::_duplicate (obj); 00748 } 00749 } 00750 catch (const CORBA::Exception& ex) 00751 { 00752 ex._tao_print_exception ( 00753 "ImR_Locator_i::set_timeout_policy ()"); 00754 } 00755 00756 return ret._retn (); 00757 }
| int ImR_Locator_i::setup_multicast | ( | ACE_Reactor * | reactor, | |
| const char * | ior | |||
| ) | [private] |
Definition at line 311 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, ACE_DEFAULT_MULTICAST_ADDR, ACE_OS::atoi(), debug_, ACE_OS::getenv(), LM_DEBUG, TAO_ORB_Parameters::mcast_discovery_endpoint(), TAO::MCAST_IMPLREPOSERVICE, TAO_ORB_Core::orb_params(), ACE_Event_Handler::READ_MASK, ACE_Reactor::register_handler(), TAO_ORB_Parameters::service_port(), TAO_DEFAULT_IMPLREPO_SERVER_REQUEST_PORT, TAO_ORB_Core_instance(), and TAO_SERVICEID_IMPLREPOSERVICE.
00312 { 00313 ACE_ASSERT (reactor != 0); 00314 ACE_ASSERT (ior != 0); 00315 #if defined (ACE_HAS_IP_MULTICAST) 00316 00317 TAO_ORB_Core* core = TAO_ORB_Core_instance (); 00318 // See if the -ORBMulticastDiscoveryEndpoint option was specified. 00319 ACE_CString mde (core->orb_params ()->mcast_discovery_endpoint ()); 00320 00321 if (mde.length () != 0) 00322 { 00323 if (this->ior_multicast_.init (ior, 00324 mde.c_str (), TAO_SERVICEID_IMPLREPOSERVICE) == -1) 00325 { 00326 return -1; 00327 } 00328 } 00329 else 00330 { 00331 // Port can be specified as param, env var, or default 00332 CORBA::UShort port = 00333 core->orb_params ()->service_port (TAO::MCAST_IMPLREPOSERVICE); 00334 if (port == 0) 00335 { 00336 // Check environment var. for multicast port. 00337 const char* port_number = ACE_OS::getenv ("ImplRepoServicePort"); 00338 00339 if (port_number != 0) 00340 port = static_cast<CORBA::UShort> (ACE_OS::atoi (port_number)); 00341 } 00342 if (port == 0) 00343 port = TAO_DEFAULT_IMPLREPO_SERVER_REQUEST_PORT; 00344 00345 if (this->ior_multicast_.init (ior, port, 00346 ACE_DEFAULT_MULTICAST_ADDR, TAO_SERVICEID_IMPLREPOSERVICE) == -1) 00347 { 00348 return -1; 00349 } 00350 } 00351 00352 // Register event handler for the ior multicast. 00353 if (reactor->register_handler (&this->ior_multicast_, 00354 ACE_Event_Handler::READ_MASK) == -1) 00355 { 00356 if (debug_ >= 1) 00357 ACE_DEBUG ((LM_DEBUG, "ImR: cannot register Event handler\n")); 00358 return -1; 00359 } 00360 #else /* ACE_HAS_IP_MULTICAST*/ 00361 ACE_UNUSED_ARG (reactor); 00362 ACE_UNUSED_ARG (ior); 00363 #endif /* ACE_HAS_IP_MULTICAST*/ 00364 return 0; 00365 }
| void ImR_Locator_i::shutdown | ( | CORBA::Boolean | activators, | |
| CORBA::Boolean | servers | |||
| ) | [virtual] |
Definition at line 219 of file ImR_Locator_i.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_ASSERT, ACE_DEBUG, ACE_ERROR, connect_activator(), debug_, CORBA::is_nil(), LM_DEBUG, LM_ERROR, and shutdown().
00220 { 00221 if (servers != 0 && this->repository_.servers ().current_size () > 0) 00222 { 00223 // Note : shutdown is oneway, so we can't throw 00224 ACE_ERROR ((LM_ERROR, "ImR: Shutdown of all servers not implemented.\n")); 00225 } 00226 if (activators != 0 && this->repository_.activators ().current_size () > 0) 00227 { 00228 ACE_Vector<ImplementationRepository::Activator_var> acts; 00229 Locator_Repository::AIMap::ENTRY* entry = 0; 00230 Locator_Repository::AIMap::ITERATOR it (this->repository_.activators ()); 00231 for (;it.next (entry) != 0; it.advance ()) 00232 { 00233 Activator_Info_Ptr info = entry->int_id_; 00234 ACE_ASSERT (! info.null ()); 00235 connect_activator (*info); 00236 if (! CORBA::is_nil (info->activator.in ())) 00237 acts.push_back (info->activator); 00238 } 00239 00240 int shutdown_errs = 0; 00241 00242 for (size_t i = 0; i < acts.size (); ++i) 00243 { 00244 try 00245 { 00246 acts[i]->shutdown (); 00247 acts[i] = ImplementationRepository::Activator::_nil (); 00248 } 00249 catch (const CORBA::Exception& ex) 00250 { 00251 ++shutdown_errs; 00252 if (debug_ > 1) 00253 { 00254 ex._tao_print_exception ( 00255 "ImR: shutdown activator"); 00256 } 00257 } 00258 } 00259 if (debug_ > 0 && shutdown_errs > 0) 00260 { 00261 ACE_DEBUG ((LM_DEBUG, "ImR: Some activators could not be shut down.\n")); 00262 } 00263 } 00264 // Technically, we should wait for all the activators to unregister, but 00265 // ,for now at least, it doesn't seem worth it. 00266 this->shutdown (false); 00267 }
| void ImR_Locator_i::shutdown | ( | bool | wait_for_completion | ) |
Shutdown the orb.
Definition at line 270 of file ImR_Locator_i.cpp.
References orb_.
Referenced by ImR_Locator_Shutdown::operator()(), and shutdown().
00271 { 00272 this->orb_->shutdown (wait_for_completion); 00273 }
| void ImR_Locator_i::shutdown_server | ( | const char * | name | ) | [virtual] |
Definition at line 905 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, ACE_ERROR, connect_server(), DEFAULT_SHUTDOWN_TIMEOUT, Locator_Repository::get_server(), TAO_Pseudo_Var_T< T >::in(), CORBA::is_nil(), LM_DEBUG, LM_ERROR, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), repository_, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::reset(), set_timeout_policy(), and Locator_Repository::update_server().
00906 { 00907 ACE_ASSERT (server != 0); 00908 00909 if (this->debug_ > 0) 00910 ACE_DEBUG ((LM_DEBUG, "ImR: Shutting down server <%s>.\n", server)); 00911 00912 Server_Info_Ptr info = this->repository_.get_server (server); 00913 if (info.null ()) 00914 { 00915 ACE_ERROR ((LM_ERROR, 00916 "ImR: shutdown_server () Cannot find info for server <%s>\n", server)); 00917 throw ImplementationRepository::NotFound (); 00918 } 00919 00920 connect_server (*info); 00921 00922 if (CORBA::is_nil (info->server.in ())) 00923 { 00924 ACE_ERROR ((LM_ERROR, 00925 "ImR: shutdown_server () Cannot connect to server <%s>\n", server)); 00926 throw ImplementationRepository::NotFound (); 00927 } 00928 00929 try 00930 { 00931 CORBA::Object_var obj = set_timeout_policy (info->server.in (), DEFAULT_SHUTDOWN_TIMEOUT); 00932 ImplementationRepository::ServerObject_var server = 00933 ImplementationRepository::ServerObject::_unchecked_narrow (obj.in ()); 00934 server->shutdown (); 00935 } 00936 catch (const CORBA::TIMEOUT&) 00937 { 00938 info->reset (); 00939 int err = this->repository_.update_server (*info); 00940 ACE_ASSERT (err == 0); 00941 ACE_UNUSED_ARG (err); 00942 // Note : This is a good thing. It means we didn't waste our time waiting for 00943 // the server to finish shutting down. 00944 if (this->debug_ > 1) 00945 { 00946 ACE_DEBUG ((LM_DEBUG, "ImR: Timeout while waiting for <%s> shutdown.\n", server)); 00947 } 00948 throw; 00949 } 00950 catch (const CORBA::Exception&) 00951 { 00952 if (this->debug_ > 1) 00953 { 00954 ACE_DEBUG ((LM_DEBUG, "ImR: Exception ignored while shutting down <%s>\n", server)); 00955 } 00956 } 00957 00958 // Note : In most cases this has already been done in the server_is_shutting_down () 00959 // operation, but it doesn't hurt to update it again. 00960 info->reset (); 00961 00962 int err = this->repository_.update_server (*info); 00963 ACE_ASSERT (err == 0); 00964 ACE_UNUSED_ARG (err); 00965 }
| ImplementationRepository::StartupInfo * ImR_Locator_i::start_server | ( | Server_Info & | info, | |
| bool | manual_start, | |||
| int & | waiting_clients | |||
| ) | [private] |
Definition at line 585 of file ImR_Locator_i.cpp.
References CORBA::Exception::_tao_print_exception(), ACE_ASSERT, ACE_DEBUG, Server_Info::activation_mode, Server_Info::activator, ACE_String_Base< CHAR >::c_str(), Server_Info::cmdline, debug_, Server_Info::dir, Server_Info::env_vars, get_activator(), CORBA::is_nil(), ACE_String_Base< CHAR >::length(), LM_DEBUG, Server_Info::name, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), Server_Info::partial_ior, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::reset(), Server_Info::reset(), Server_Info::start_count, Server_Info::start_limit, Server_Info::starting, CORBA::string_dup(), and waiter_.
Referenced by activate_perclient_server_i(), and activate_server_i().
00587 { 00588 if (info.activation_mode == ImplementationRepository::MANUAL && ! manual_start) 00589 { 00590 if (debug_ > 0) 00591 ACE_DEBUG ((LM_DEBUG, "ImR: Cannot start server <%s>. ActivationMode=MANUAL\n", info.name.c_str ())); 00592 throw ImplementationRepository::CannotActivate( 00593 CORBA::string_dup ( 00594 "Cannot implicitly activate MANUAL server.")); 00595 } 00596 if (info.cmdline.length () == 0) 00597 { 00598 if (debug_ > 0) 00599 ACE_DEBUG ((LM_DEBUG, "ImR: Cannot start server <%s>." 00600 " No command line.\n", info.name.c_str ())); 00601 throw ImplementationRepository::CannotActivate( 00602 CORBA::string_dup ( 00603 "No command line registered for server.")); 00604 } 00605 00606 Activator_Info_Ptr ainfo = get_activator (info.activator); 00607 00608 if (ainfo.null () || CORBA::is_nil (ainfo->activator.in ())) 00609 { 00610 if (debug_ > 0) 00611 ACE_DEBUG ((LM_DEBUG, "ImR: Cannot start server <%s>. " 00612 "Activator <%s> not found.\n", info.name.c_str (), info.activator.c_str ())); 00613 throw ImplementationRepository::CannotActivate( 00614 CORBA::string_dup ( 00615 "No activator registered for server.")); 00616 } 00617 00618 try 00619 { 00620 ++waiting_clients; 00621 00622 if (waiting_clients <= 1 || 00623 info.activation_mode == ImplementationRepository::PER_CLIENT) 00624 { 00625 info.starting = true; 00626 ++info.start_count; 00627 ACE_ASSERT (info.start_count <= info.start_limit); 00628 if (this->debug_ > 0) 00629 { 00630 ACE_DEBUG ((LM_DEBUG, "ImR: Starting server <%s>. Attempt %d/%d.\n", 00631 info.name.c_str (), info.start_count, info.start_limit)); 00632 } 00633 ainfo->activator->start_server ( 00634 info.name.c_str (), 00635 info.cmdline.c_str (), 00636 info.dir.c_str (), 00637 info.env_vars); 00638 } 00639 00640 if (info.partial_ior.length () == 0) 00641 { 00642 if (this->debug_ > 0) 00643 { 00644 ACE_DEBUG ((LM_DEBUG, "ImR: Waiting for <%s> to start...\n", info.name.c_str ())); 00645 } 00646 00647 ImplementationRepository::StartupInfo_var si = 00648 waiter_->wait_for_startup (info.name.c_str ()); 00649 00650 --waiting_clients; 00651 info.starting = false; 00652 00653 return si._retn (); 00654 } 00655 else // The server_is_running () came in before the wait_for_startup () 00656 { 00657 if (this->debug_ > 0) 00658 { 00659 ACE_DEBUG ((LM_DEBUG, "ImR: <%s> Skipping wait. Already started.\n", info.name.c_str ())); 00660 } 00661 --waiting_clients; 00662 info.starting = false; 00663 } 00664 } 00665 catch (const CORBA::TIMEOUT&) 00666 { 00667 --waiting_clients; 00668 info.starting = false; 00669 // We may have connected successfully, because the timeout could occur before 00670 // the AsyncStartupWaiter manages to return. In fact, when the ImR is very busy 00671 // this is the most likely code path. 00672 if (info.partial_ior.length () == 0) 00673 { 00674 if (debug_ > 0) 00675 ACE_DEBUG ((LM_DEBUG, "ImR : Timeout waiting for <%s> to start.\n", info.name.c_str ())); 00676 info.reset (); 00677 } 00678 } 00679 catch (const ImplementationRepository::CannotActivate&) 00680 { 00681 --waiting_clients; 00682 info.starting = false; 00683 info.reset (); 00684 if (debug_ > 0) 00685 ACE_DEBUG ((LM_DEBUG, "ImR: Activator cannot start <%s>.\n", info.name.c_str ())); 00686 } 00687 catch (const CORBA::Exception& ex) 00688 { 00689 --waiting_clients; 00690 info.starting = false; 00691 if (debug_ > 0) 00692 ACE_DEBUG ((LM_DEBUG, "ImR: Unexpected exception while starting <%s>.\n", info.name.c_str ())); 00693 if (debug_ > 1) 00694 ex._tao_print_exception (""); 00695 info.reset (); 00696 00697 // Before we reset the activator info, let's see if it's still 00698 // there then let's keep it around for a while. 00699 bool dead_activator = false; 00700 try 00701 { 00702 dead_activator = ainfo->activator->_non_existent (); 00703 } 00704 catch (const CORBA::Exception&) 00705 { 00706 dead_activator = true; 00707 } 00708 00709 if (dead_activator) 00710 { 00711 // Activator is damaged - reset our info. 00712 // Client's trying to restart a server on this host will 00713 // subsequently be told "no activator found for host ..." or 00714 // some such. 00715 ainfo->reset (); 00716 } 00717 } 00718 return 0; // This is not a corba call, so a zero should be ok 00719 }
| void ImR_Locator_i::teardown_multicast | ( | ) | [private] |
Definition at line 301 of file ImR_Locator_i.cpp.
References ior_multicast_, ACE_Event_Handler::READ_MASK, and ACE_Reactor::remove_handler().
Referenced by fini().
00302 { 00303 ACE_Reactor* r = ior_multicast_.reactor (); 00304 if (r != 0) { 00305 r->remove_handler (&ior_multicast_, ACE_Event_Handler::READ_MASK); 00306 ior_multicast_.reactor (0); 00307 } 00308 }
| void ImR_Locator_i::unregister_activator | ( | const char * | name, | |
| CORBA::Long | token | |||
| ) | [virtual] |
Definition at line 394 of file ImR_Locator_i.cpp.
References ACE_ASSERT, ACE_DEBUG, get_activator(), LM_DEBUG, ACE_Strong_Bound_Ptr< X, ACE_LOCK >::null(), and unregister_activator_i().
00396 { 00397 ACE_ASSERT (aname != 0); 00398 Activator_Info_Ptr info = this->get_activator (aname); 00399 00400 if (! info.null ()) 00401 { 00402 if (info->token != token && this->debug_ > 0) 00403 { 00404 ACE_DEBUG ((LM_DEBUG, "ImR: Ignoring unregister activator:%s. Wrong token.\n", aname)); 00405 return; 00406 } 00407 00408 this->unregister_activator_i (aname); 00409 00410 if (this->debug_ > 0) 00411 ACE_DEBUG ((LM_DEBUG, "ImR: Activator %s unregistered.\n", aname)); 00412 } 00413 else 00414 { 00415 if (this->debug_ > 0) 00416 ACE_DEBUG ((LM_DEBUG, "ImR: Ignoring unregister activator:%s. Unknown activator.\n", aname)); 00417 } 00418 }
| void ImR_Locator_i::unregister_activator_i | ( | const char * | activator | ) | [private] |
Definition at line 421 of file ImR_Locator_i.cpp.
References ACE_ASSERT, Locator_Repository::remove_activator(), and repository_.
Referenced by register_activator(), and unregister_activator().
00422 { 00423 ACE_ASSERT (aname != 0); 00424 int err = this->repository_.remove_activator (aname); 00425 ACE_UNUSED_ARG (err); 00426 }
ImR_Adapter ImR_Locator_i::adapter_ [private] |
int ImR_Locator_i::debug_ [private] |
Definition at line 141 of file ImR_Locator_i.h.
Referenced by activate_perclient_server_i(), activate_server(), activate_server_i(), add_or_update_server(), connect_activator(), connect_server(), debug(), find(), fini(), init_with_orb(), is_alive(), is_alive_i(), run(), setup_multicast(), shutdown(), and start_server().
ImR_Forwarder ImR_Locator_i::forwarder_ [private] |
IORTable::Locator_var ImR_Locator_i::ins_locator_ [private] |
The locator interface for the IORTable.
Definition at line 135 of file ImR_Locator_i.h.
Referenced by ImR_Locator_i().
TAO_IOR_Multicast ImR_Locator_i::ior_multicast_ [private] |
CORBA::ORB_var ImR_Locator_i::orb_ [private] |
Definition at line 137 of file ImR_Locator_i.h.
Referenced by connect_activator(), connect_server(), fini(), init_with_orb(), is_alive(), register_activator(), run(), server_is_running(), set_timeout_policy(), and shutdown().
ACE_Time_Value ImR_Locator_i::ping_interval_ [private] |
Definition at line 152 of file ImR_Locator_i.h.
Referenced by init_with_orb(), is_alive_i(), and run().
bool ImR_Locator_i::read_only_ [private] |
Locator_Repository ImR_Locator_i::repository_ [private] |
Definition at line 145 of file ImR_Locator_i.h.
Referenced by activate_perclient_server_i(), activate_server_by_name(), add_or_update_server(), find(), get_activator(), init_with_orb(), is_alive_i(), list(), notify_child_death(), register_activator(), remove_server(), run(), server_is_running(), server_is_shutting_down(), shutdown_server(), and unregister_activator_i().
Definition at line 138 of file ImR_Locator_i.h.
Referenced by findPOA(), fini(), and init_with_orb().
Definition at line 151 of file ImR_Locator_i.h.
Referenced by connect_activator(), init_with_orb(), and run().
ImplementationRepository::AsyncStartupWaiter_var ImR_Locator_i::waiter_ [private] |
Definition at line 147 of file ImR_Locator_i.h.
Referenced by activate_server_i(), init_with_orb(), and server_is_running().
 1.4.7
1.4.7