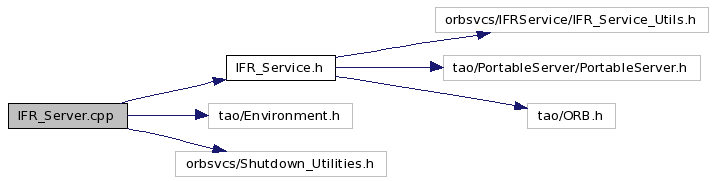
#include "IFR_Service.h"#include "tao/Environment.h"#include "orbsvcs/Shutdown_Utilities.h"Include dependency graph for IFR_Server.cpp:
Go to the source code of this file.
Classes | |
| class | IFR_Service_Shutdown_Functor |
Functions | |
| int | ACE_TMAIN (int argc, ACE_TCHAR *argv[]) |
Definition at line 37 of file IFR_Server.cpp.
References CORBA::Exception::_tao_print_exception(), IFR_Service::fini(), IFR_Service::init(), and IFR_Service::run().
00038 { 00039 IFR_Service server; 00040 00041 IFR_Service_Shutdown_Functor killer (server); 00042 Service_Shutdown kill_contractor (killer); 00043 00044 try 00045 { 00046 int status = server.init (argc, argv); 00047 00048 if (status != 0) 00049 { 00050 return 1; 00051 } 00052 else 00053 { 00054 server.run (); 00055 00056 status = server.fini (); 00057 00058 if (status == -1) 00059 { 00060 return 1; 00061 } 00062 } 00063 } 00064 catch (const CORBA::SystemException& sysex) 00065 { 00066 sysex._tao_print_exception ("System Exception"); 00067 return -1; 00068 } 00069 catch (const CORBA::Exception& ex) 00070 { 00071 ex._tao_print_exception ("Unknown Exception"); 00072 return -1; 00073 } 00074 return 0; 00075 }
 1.4.7
1.4.7