#include <RT_ORB_Loader.h>
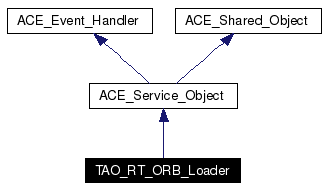
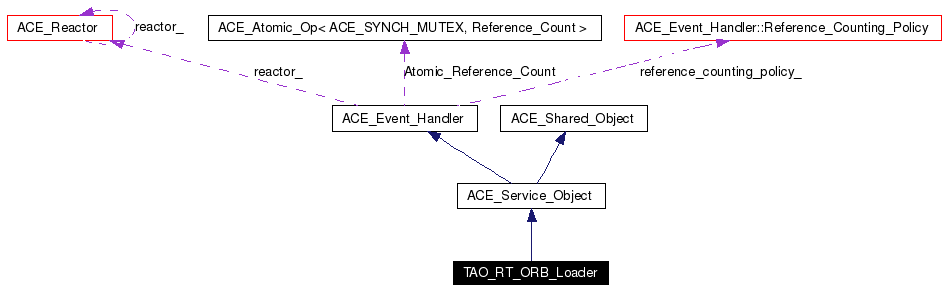
Inheritance diagram for TAO_RT_ORB_Loader:
Public Member Functions | |
| virtual | ~TAO_RT_ORB_Loader (void) |
| Destructor. | |
| virtual int | init (int argc, ACE_TCHAR *[]) |
| Initialize the RT ORB loader hooks. | |
|
|
Destructor.
Definition at line 20 of file RT_ORB_Loader.cpp.
00021 {
00022 }
|
|
||||||||||||
|
Initialize the RT ORB loader hooks. Register the RTCORBA ORBInitializer. Reimplemented from ACE_Shared_Object. Definition at line 25 of file RT_ORB_Loader.cpp. References ACE_Arg_Shifter, ACE_DEBUG, ACE_ERROR, ACE_NEW_THROW_EX, ACE_SCHED_FIFO, ACE_SCHED_OTHER, ACE_SCHED_RR, ACE_TCHAR, ACE_TEXT, ACE_Time_Value, ACE_TRACE, ACE_OS::atoi(), LM_DEBUG, LM_ERROR, PortableInterceptor::register_orb_initializer(), ACE_OS::strcasecmp(), and TAO_debug_level.
00026 {
00027 ACE_TRACE ("TAO_RT_ORB_Loader::init");
00028
00029 static bool initialized = false;
00030
00031 // Only allow initialization once.
00032 if (initialized)
00033 return 0;
00034
00035 initialized = true;
00036
00037 // Set defaults.
00038 int priority_mapping_type =
00039 TAO_RT_ORBInitializer::TAO_PRIORITY_MAPPING_DIRECT;
00040 int network_priority_mapping_type =
00041 TAO_RT_ORBInitializer::TAO_NETWORK_PRIORITY_MAPPING_LINEAR;
00042 int ace_sched_policy = ACE_SCHED_OTHER;
00043 long sched_policy = THR_SCHED_DEFAULT;
00044 long scope_policy = THR_SCOPE_PROCESS;
00045 int curarg = 0;
00046 ACE_Time_Value dynamic_thread_idle_timeout;
00047
00048 ACE_Arg_Shifter arg_shifter (argc, argv);
00049
00050 // Parse any service configurator parameters.
00051 while (arg_shifter.is_anything_left ())
00052 {
00053 const ACE_TCHAR *current_arg = 0;
00054 if (0 != (current_arg = arg_shifter.get_the_parameter
00055 (ACE_TEXT("-ORBPriorityMapping"))))
00056 {
00057 const ACE_TCHAR *name = current_arg;
00058 if (ACE_OS::strcasecmp (name,
00059 ACE_TEXT("continuous")) == 0)
00060 priority_mapping_type =
00061 TAO_RT_ORBInitializer::TAO_PRIORITY_MAPPING_CONTINUOUS;
00062 else if (ACE_OS::strcasecmp (name,
00063 ACE_TEXT("linear")) == 0)
00064 priority_mapping_type =
00065 TAO_RT_ORBInitializer::TAO_PRIORITY_MAPPING_LINEAR;
00066 else if (ACE_OS::strcasecmp (name,
00067 ACE_TEXT("direct")) == 0)
00068 priority_mapping_type =
00069 TAO_RT_ORBInitializer::TAO_PRIORITY_MAPPING_DIRECT;
00070 else
00071 ACE_DEBUG ((LM_DEBUG,
00072 ACE_TEXT("RT_ORB_Loader - unknown argument")
00073 ACE_TEXT(" <%s> for -ORBPriorityMapping\n"),
00074 name));
00075 arg_shifter.consume_arg ();
00076 }
00077 else if (0 != (current_arg = arg_shifter.get_the_parameter
00078 (ACE_TEXT("-ORBSchedPolicy"))))
00079 {
00080 const ACE_TCHAR *name = current_arg;
00081 if (ACE_OS::strcasecmp (name,
00082 ACE_TEXT("SCHED_OTHER")) == 0)
00083 {
00084 ace_sched_policy = ACE_SCHED_OTHER;
00085 sched_policy = THR_SCHED_DEFAULT;
00086 }
00087 else if (ACE_OS::strcasecmp (name,
00088 ACE_TEXT("SCHED_FIFO")) == 0)
00089 {
00090 ace_sched_policy = ACE_SCHED_FIFO;
00091 sched_policy = THR_SCHED_FIFO;
00092 }
00093 else if (ACE_OS::strcasecmp (name,
00094 ACE_TEXT("SCHED_RR")) == 0)
00095 {
00096 ace_sched_policy = ACE_SCHED_RR;
00097 sched_policy = THR_SCHED_RR;
00098 }
00099 else
00100 ACE_DEBUG ((LM_DEBUG,
00101 ACE_TEXT("RT_ORB_Loader - unknown argument")
00102 ACE_TEXT(" <%s> for -ORBSchedPolicy\n"),
00103 name));
00104 arg_shifter.consume_arg ();
00105 }
00106 else if (0 != (current_arg = arg_shifter.get_the_parameter
00107 (ACE_TEXT("-ORBScopePolicy"))))
00108 {
00109 const ACE_TCHAR *name = current_arg;
00110 if (ACE_OS::strcasecmp (name,
00111 ACE_TEXT("SYSTEM")) == 0)
00112 scope_policy = THR_SCOPE_SYSTEM;
00113 else if (ACE_OS::strcasecmp (name,
00114 ACE_TEXT("PROCESS")) == 0)
00115 scope_policy = THR_SCOPE_PROCESS;
00116 else
00117 ACE_DEBUG ((LM_DEBUG,
00118 ACE_TEXT("RT_ORB_Loader - unknown argument")
00119 ACE_TEXT(" <%s> for -ORBScopePolicy\n"),
00120 name));
00121 arg_shifter.consume_arg ();
00122 }
00123 else if (0 != (current_arg = arg_shifter.get_the_parameter
00124 (ACE_TEXT("-RTORBNetworkPriorityMapping"))))
00125 {
00126 const ACE_TCHAR *name = current_arg;
00127 if (ACE_OS::strcasecmp (name,
00128 ACE_TEXT("linear")) == 0)
00129 network_priority_mapping_type =
00130 TAO_RT_ORBInitializer::TAO_NETWORK_PRIORITY_MAPPING_LINEAR;
00131 arg_shifter.consume_arg ();
00132 }
00133 else if (0 != (current_arg = arg_shifter.get_the_parameter
00134 (ACE_TEXT("-RTORBDynamicThreadIdleTimeout"))))
00135 {
00136 const ACE_TCHAR *name = current_arg;
00137 int timeout = ACE_OS::atoi (name);
00138 dynamic_thread_idle_timeout = ACE_Time_Value (0, timeout);
00139 arg_shifter.consume_arg ();
00140 }
00141 else
00142 {
00143 arg_shifter.ignore_arg ();
00144 if (TAO_debug_level > 0)
00145 {
00146 ACE_ERROR ((LM_ERROR,
00147 ACE_TEXT("RT_ORB_Loader: Unknown option ")
00148 ACE_TEXT("<%s>.\n"),
00149 argv[curarg]));
00150 }
00151 }
00152 }
00153
00154 // Register the ORB initializer.
00155 try
00156 {
00157 PortableInterceptor::ORBInitializer_ptr temp_orb_initializer =
00158 PortableInterceptor::ORBInitializer::_nil ();
00159
00160 /// Register the RTCORBA ORBInitializer.
00161 ACE_NEW_THROW_EX (temp_orb_initializer,
00162 TAO_RT_ORBInitializer (priority_mapping_type,
00163 network_priority_mapping_type,
00164 ace_sched_policy,
00165 sched_policy,
00166 scope_policy,
00167 dynamic_thread_idle_timeout),
00168 CORBA::NO_MEMORY (
00169 CORBA::SystemException::_tao_minor_code (
00170 TAO::VMCID,
00171 ENOMEM),
00172 CORBA::COMPLETED_NO));
00173
00174 PortableInterceptor::ORBInitializer_var orb_initializer;
00175 orb_initializer = temp_orb_initializer;
00176
00177 PortableInterceptor::register_orb_initializer (orb_initializer.in ());
00178 }
00179 catch (const ::CORBA::Exception& ex)
00180 {
00181 ex._tao_print_exception (
00182 "Unexpected exception caught while "
00183 "initializing the RTORB");
00184 return 1;
00185 }
00186
00187 return 0;
00188 }
|
 1.3.6
1.3.6