#include <tao_imr_i.h>
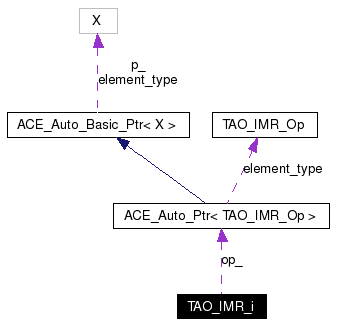
Collaboration diagram for TAO_IMR_i:
Public Member Functions | |
| TAO_IMR_i (void) | |
| ~TAO_IMR_i (void) | |
| int | run (void) |
| Execute client code. | |
| int | init (int argc, char **argv) |
| Initialize the client communication endpoint with server. | |
Private Member Functions | |
| void | print_usage (void) |
| Print out information about all operations. | |
| int | parse_args (void) |
| Parses the arguments passed on the command line. | |
Private Attributes | |
| int | argc_ |
| # of arguments on the command line. | |
| ACE_TCHAR ** | argv_ |
| Arguments from command line. | |
| CORBA::ORB_var | orb_ |
| Remember our orb. | |
| ImplementationRepository::Administration_var | imr_ |
| ACE_Auto_Ptr< TAO_IMR_Op > | op_ |
| What we need to do. | |
This class talks to the IMR and registers/lists/etc.
Definition at line 33 of file tao_imr_i.h.
|
|
Definition at line 16 of file tao_imr_i.cpp.
00017 : imr_ (ImplementationRepository::Administration::_nil ()) 00018 { 00019 // Nothing 00020 } |
|
|
Definition at line 22 of file tao_imr_i.cpp.
00023 {
00024 }
|
|
||||||||||||
|
Initialize the client communication endpoint with server.
Definition at line 39 of file tao_imr_i.cpp. References ACE_ERROR, CORBA::is_nil(), LM_ERROR, op_, CORBA::ORB_init(), and parse_args().
00040 {
00041 this->argc_ = argc;
00042 this->argv_ = argv;
00043
00044 const char *exception_message = "Null Message";
00045
00046 try
00047 {
00048 // Retrieve the ORB.
00049 this->orb_ = CORBA::ORB_init (this->argc_, this->argv_, "tao_imr_i");
00050
00051 // Parse command line and verify parameters.
00052 if (this->parse_args () == -1)
00053 return -1;
00054
00055 // Get the ImplRepo object
00056 CORBA::Object_var obj =
00057 orb_->resolve_initial_references ("ImplRepoService");
00058
00059 if (CORBA::is_nil (obj.in ()))
00060 {
00061 ACE_ERROR ((LM_ERROR, "Unable to resolve the ImR.\n"));
00062 return -1;
00063 }
00064
00065 exception_message = "While narrowing ImR";
00066
00067 this->imr_ =
00068 ImplementationRepository::Administration::_narrow (obj.in ());
00069
00070 if (CORBA::is_nil (imr_.in ()))
00071 {
00072 ACE_ERROR ((LM_ERROR, "Unable to narrow the ImR.\n"));
00073 return -1;
00074 }
00075
00076 this->op_->set_imr (this->imr_.in ());
00077 }
00078 catch (const CORBA::Exception& ex)
00079 {
00080 ACE_ERROR ((LM_ERROR, "TAO_IMR_i::init - %s\n", exception_message));
00081 ex._tao_print_exception ("Exception");
00082 return -1;
00083 }
00084
00085 return 0;
00086 }
|
|
|
Parses the arguments passed on the command line.
Definition at line 92 of file tao_imr_i.cpp. References ACE_ERROR, ACE_Auto_Basic_Ptr< X >::get(), LM_ERROR, op_, print_usage(), and ACE_Auto_Basic_Ptr< X >::reset(). Referenced by init().
00093 {
00094 // Make sure one command was given
00095 if (this->argc_ < 2)
00096 {
00097 ACE_ERROR((LM_ERROR, "Error: No operation specified.\n"));
00098 this->print_usage ();
00099 return -1;
00100 }
00101
00102 this->op_.reset (TAO_IMR_Op::make_op (this->argv_[1]));
00103
00104 // Check for unrecognized operation
00105
00106 if (this->op_.get () == 0)
00107 {
00108 ACE_ERROR((LM_ERROR, "Error: Unknown operation '%s'.\n", this->argv_[1]));
00109 this->print_usage ();
00110 return -1;
00111 }
00112
00113 // Adjust argc and argv so only the command specific args are passed
00114 return this->op_->parse (this->argc_ - 1, this->argv_ + 1);
00115 }
|
|
|
Print out information about all operations.
Definition at line 121 of file tao_imr_i.cpp. References ACE_ERROR, and LM_ERROR. Referenced by parse_args().
00122 {
00123 ACE_ERROR ((LM_ERROR, "Usage: tao_imr [options] command [command-arguments]\n"
00124 " where [options] are ORB options\n"
00125 " where command is one of the following:\n"
00126 " start Start a server through the ImR\n"
00127 " add Add an entry to the ImR\n"
00128 " autostart Activates all AUTO_START servers\n"
00129 " ior Creates a simplified IOR\n"
00130 " list List the entries in the ImR\n"
00131 " remove Remove an entry from the ImR\n"
00132 " shutdown Shut down a server through the ImR\n"
00133 " shutdown-repo Shut down the ImR\n"
00134 " update Update an entry in the ImR\n"
00135 " where [command-arguments] depend on the command\n"));
00136 }
|
|
|
Execute client code.
Definition at line 27 of file tao_imr_i.cpp. References ACE_ERROR, ACE_Auto_Basic_Ptr< X >::get(), LM_ERROR, and op_.
00028 {
00029 if (this->op_.get () == 0)
00030 {
00031 ACE_ERROR ((LM_ERROR, "Unknown operation"));
00032 return TAO_IMR_Op::UNKNOWN;
00033 }
00034
00035 return this->op_->run ();
00036 }
|
|
|
# of arguments on the command line.
Definition at line 55 of file tao_imr_i.h. |
|
|
Arguments from command line.
Definition at line 58 of file tao_imr_i.h. |
|
|
Reference to our Locator interface of implementation repository. Definition at line 65 of file tao_imr_i.h. |
|
|
What we need to do.
Definition at line 68 of file tao_imr_i.h. Referenced by init(), parse_args(), and run(). |
|
|
Remember our orb.
Definition at line 61 of file tao_imr_i.h. |
 1.3.6
1.3.6