#include <Service.h>
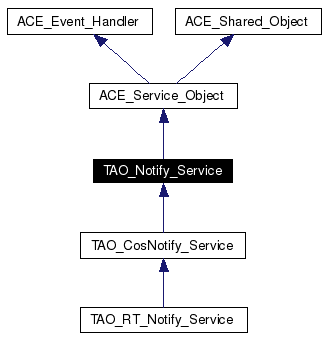
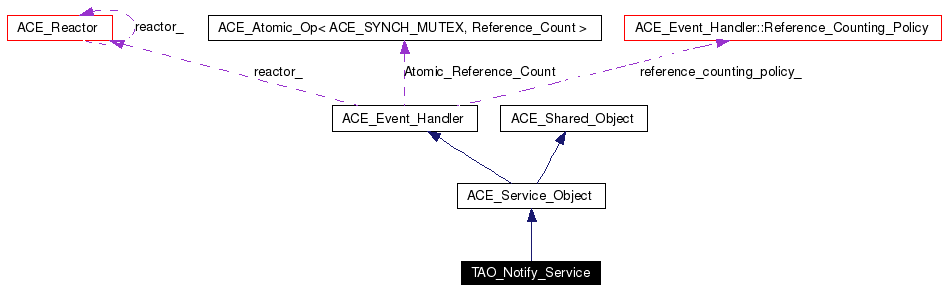
Inheritance diagram for TAO_Notify_Service:
Public Member Functions | |
| virtual | ~TAO_Notify_Service (void) |
| Destructor. | |
| virtual int | init (int argc, ACE_TCHAR *argv[])=0 |
| Init the service from configurator. | |
| virtual void | init_service (CORBA::ORB_ptr orb)=0 |
| Init the service. | |
| virtual void | init_service2 (CORBA::ORB_ptr orb, CORBA::ORB_ptr dispatching_orb)=0 |
| Init the service with separate dispatching orb. | |
| virtual void | finalize_service (CosNotifyChannelAdmin::EventChannelFactory_ptr factory)=0 |
| virtual CosNotifyChannelAdmin::EventChannelFactory_ptr | create (PortableServer::POA_ptr default_POA, const char *factory_name="EventChannelFactory")=0 |
| Create the Channel Factory. | |
Static Public Member Functions | |
| TAO_Notify_Service * | load_default (void) |
Definition at line 54 of file Service.h.
|
|
Destructor.
Definition at line 12 of file Service.cpp.
00013 {
00014 }
|
|
||||||||||||
|
Create the Channel Factory.
Implemented in TAO_CosNotify_Service. Referenced by TAO_Notify_EventChannelFactory_i::create(). |
|
|
Finalize the service. This hook allows the service to perform actions when the user wants it to shut down. Implemented in TAO_CosNotify_Service. |
|
||||||||||||
|
Init the service from configurator.
Reimplemented from ACE_Shared_Object. Implemented in TAO_CosNotify_Service. |
|
|
Init the service.
Implemented in TAO_CosNotify_Service, and TAO_RT_Notify_Service. Referenced by TAO_Notify_EventChannelFactory_i::create(). |
|
||||||||||||
|
Init the service with separate dispatching orb.
Implemented in TAO_CosNotify_Service. |
|
|
Load an implementation of the TAO_Notify_Service based on which implementations are loaded. Definition at line 17 of file Service.cpp. References ACE_Dynamic_Service< TYPE >::instance(), TAO_COS_NOTIFICATION_SERVICE_NAME, TAO_MC_NOTIFICATION_SERVICE_NAME, and TAO_NOTIFICATION_SERVICE_NAME.
00018 {
00019 static const char* services[] = { TAO_MC_NOTIFICATION_SERVICE_NAME,
00020 TAO_NOTIFICATION_SERVICE_NAME,
00021 TAO_COS_NOTIFICATION_SERVICE_NAME,
00022 0
00023 };
00024
00025 TAO_Notify_Service* notify_service = 0;
00026 for(size_t i = 0; services[i] != 0; i++)
00027 {
00028 notify_service =
00029 ACE_Dynamic_Service<TAO_Notify_Service>::instance (services[i]);
00030 if (notify_service != 0)
00031 break;
00032 }
00033 return notify_service;
00034 }
|
 1.3.6
1.3.6