#include <Reactive_Connect_Strategy.h>
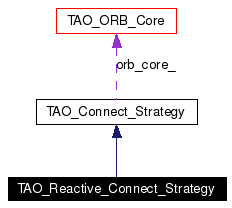
Inheritance diagram for TAO_Reactive_Connect_Strategy:
Public Member Functions | |
| TAO_Reactive_Connect_Strategy (TAO_ORB_Core *orb) | |
| Constructor. | |
| ~TAO_Reactive_Connect_Strategy (void) | |
| Destructor. | |
| virtual void | synch_options (ACE_Time_Value *val, ACE_Synch_Options &opt) |
| Obtain the synch options that can be passed to ACE_Connector. | |
Protected Member Functions | |
| virtual int | wait_i (TAO_LF_Event *ch, TAO_Transport *, ACE_Time_Value *val) |
| This is the method that does all the real interesting stuff. | |
Definition at line 38 of file Reactive_Connect_Strategy.h.
|
|
Constructor.
Definition at line 17 of file Reactive_Connect_Strategy.cpp.
00019 : TAO_Connect_Strategy (orb_core) 00020 { 00021 } |
|
|
Destructor.
Definition at line 23 of file Reactive_Connect_Strategy.cpp.
00024 {
00025 }
|
|
||||||||||||
|
Obtain the synch options that can be passed to ACE_Connector.
Implements TAO_Connect_Strategy. Definition at line 28 of file Reactive_Connect_Strategy.cpp. References ACE_Synch_Options::set().
|
|
||||||||||||||||
|
This is the method that does all the real interesting stuff.
Implements TAO_Connect_Strategy. Definition at line 45 of file Reactive_Connect_Strategy.cpp. References ACE_DEBUG, ACE_TEXT, TAO_LF_Event::error_detected(), ETIME, TAO_LF_Event::keep_waiting(), LM_DEBUG, TAO_ORB_Core::run(), and TAO_debug_level.
00048 {
00049 int result = 0;
00050 if (ev == 0)
00051 return -1;
00052
00053 if (TAO_debug_level > 2)
00054 {
00055 //FUZZ: disable check_for_lack_ACE_OS
00056 ACE_DEBUG ((LM_DEBUG,
00057 ACE_TEXT ("TAO (%P|%t) - Waiting in the Reactor for ")
00058 ACE_TEXT ("connection completion - wait ()\n")));
00059 //FUZZ: enable check_for_lack_ACE_OS
00060 }
00061
00062 try
00063 {
00064 while (ev->keep_waiting ())
00065 {
00066 result =
00067 this->orb_core_->run (max_wait_time, 1);
00068
00069 // Did we timeout? If so, stop running the loop.
00070 if (result == 0 &&
00071 max_wait_time != 0 &&
00072 *max_wait_time == ACE_Time_Value::zero)
00073 {
00074 errno = ETIME;
00075 result = -1;
00076 break;
00077 }
00078
00079 // Other errors? If so, stop running the loop.
00080 if (result == -1)
00081 break;
00082 }
00083 }
00084 catch (const ::CORBA::Exception&)
00085 {
00086 result = -1;
00087 }
00088
00089 // Set the result.
00090 if (result != -1 && ev->error_detected ())
00091 {
00092 result = -1;
00093 }
00094
00095 return result;
00096 }
|
 1.3.6
1.3.6