#include <Thread_Pool.h>
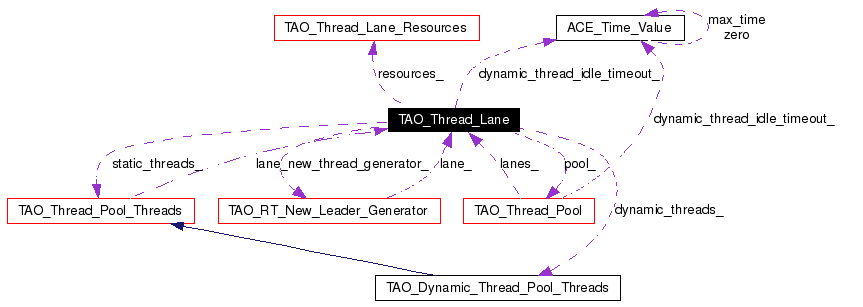
Collaboration diagram for TAO_Thread_Lane:
Accessors | |
| TAO_Thread_Pool & | pool (void) const |
| CORBA::ULong | id (void) const |
| CORBA::Short | lane_priority (void) const |
| CORBA::ULong | static_threads (void) const |
| CORBA::ULong | dynamic_threads (void) const |
| CORBA::ULong | current_threads (void) const |
| CORBA::Short | native_priority (void) const |
| TAO_Thread_Lane_Resources & | resources (void) |
| ACE_Time_Value const & | dynamic_thread_idle_timeout (void) const |
Public Member Functions | |
| TAO_Thread_Lane (TAO_Thread_Pool &pool, CORBA::ULong id, CORBA::Short lane_priority, CORBA::ULong static_threads, CORBA::ULong dynamic_threads, ACE_Time_Value const &dynamic_thread_idle_timeout) | |
| Constructor. | |
| ~TAO_Thread_Lane (void) | |
| Destructor. | |
| void | open () |
| Open the lane. | |
| void | finalize (void) |
| Finalize the resources. | |
| void | shutdown_reactor (void) |
| Shutdown the reactor. | |
| void | wait (void) |
| Wait for threads to exit. | |
| int | is_collocated (const TAO_MProfile &mprofile) |
| Does mprofile belong to us? | |
| int | create_static_threads (void) |
| Create the static threads - only called once. | |
| void | shutting_down (void) |
| bool | new_dynamic_thread (void) |
Private Member Functions | |
| void | validate_and_map_priority () |
| Validate lane's priority and map it to a native value. | |
| int | create_threads_i (TAO_Thread_Pool_Threads &thread_pool, CORBA::ULong number_of_threads, long thread_flags) |
| int | create_dynamic_threads (CORBA::ULong number_of_threads) |
Private Attributes | |
| TAO_Thread_Pool & | pool_ |
| The Thread Pool to which this lane belongs. | |
| CORBA::ULong const | id_ |
| The id of this lane. | |
| CORBA::Short | lane_priority_ |
| bool | shutdown_ |
| CORBA::ULong const | static_threads_number_ |
| Number of static threads. | |
| CORBA::ULong const | dynamic_threads_number_ |
| Maximum number of threads we are allowed to create. | |
| TAO_Thread_Pool_Threads | static_threads_ |
| Array with all static threads. | |
| TAO_Dynamic_Thread_Pool_Threads | dynamic_threads_ |
| Array with all dynamic threads. | |
| TAO_RT_New_Leader_Generator | new_thread_generator_ |
| TAO_Thread_Lane_Resources | resources_ |
| CORBA::Short | native_priority_ |
| ACE_Time_Value const | dynamic_thread_idle_timeout_ |
| ACE_SYNCH_MUTEX | lock_ |
| Lock to guard all members of the lane. | |
Definition at line 128 of file Thread_Pool.h.
|
||||||||||||||||||||||||||||
|
Constructor.
Definition at line 143 of file Thread_Pool.cpp. References TAO_INVALID_PRIORITY.
00150 : pool_ (pool), 00151 id_ (id), 00152 lane_priority_ (lane_priority), 00153 shutdown_ (false), 00154 static_threads_number_ (static_threads), 00155 dynamic_threads_number_ (dynamic_threads), 00156 static_threads_ (*this), 00157 dynamic_threads_ (*this), 00158 new_thread_generator_ (*this), 00159 resources_ (pool.manager ().orb_core (), 00160 &new_thread_generator_), 00161 native_priority_ (TAO_INVALID_PRIORITY), 00162 dynamic_thread_idle_timeout_ (dynamic_thread_idle_timeout) 00163 { 00164 } |
|
|
Destructor.
Definition at line 336 of file Thread_Pool.cpp.
00337 {
00338 }
|
|
|
Create number_of_threads of dynamic threads. Can be called multiple times. Definition at line 394 of file Thread_Pool.cpp. References ACE_GUARD_RETURN, ACE_SYNCH_MUTEX, and create_threads_i().
00395 {
00396 ACE_GUARD_RETURN (ACE_SYNCH_MUTEX,
00397 mon,
00398 this->lock_,
00399 0);
00400
00401 return this->create_threads_i (this->dynamic_threads_,
00402 number_of_threads,
00403 THR_BOUND | THR_DETACHED);
00404 }
|
|
|
Create the static threads - only called once.
Definition at line 380 of file Thread_Pool.cpp. References ACE_GUARD_RETURN, ACE_SYNCH_MUTEX, and create_threads_i(). Referenced by TAO_Thread_Pool::create_static_threads().
00381 {
00382 ACE_GUARD_RETURN (ACE_SYNCH_MUTEX,
00383 mon,
00384 this->lock_,
00385 0);
00386
00387 // Create static threads.
00388 return this->create_threads_i (this->static_threads_,
00389 this->static_threads_number_,
00390 THR_NEW_LWP | THR_JOINABLE);
00391 }
|
|
||||||||||||||||
|
Definition at line 407 of file Thread_Pool.cpp. References ACE_hthread_t, ACE_NEW_RETURN, ACE_Task_Base::activate(), TAO_Thread_Pool::manager(), TAO_Thread_Pool_Manager::orb_core(), TAO_ORB_Core::orb_params(), pool(), TAO_Thread_Pool::stack_size(), and TAO_ORB_Parameters::thread_creation_flags(). Referenced by create_dynamic_threads(), create_static_threads(), and new_dynamic_thread().
00410 {
00411 // Overwritten parameters.
00412 int force_active = 1;
00413
00414 // Default parameters.
00415 int default_grp_id = -1;
00416 ACE_Task_Base *default_task = 0;
00417 ACE_hthread_t *default_thread_handles = 0;
00418 void **default_stack = 0;
00419
00420 // Setting stack size.
00421 size_t *stack_size_array = 0;
00422 ACE_NEW_RETURN (stack_size_array,
00423 size_t[number_of_threads],
00424 -1);
00425 size_t index;
00426 for (index = 0;
00427 index != number_of_threads;
00428 ++index)
00429 stack_size_array[index] =
00430 this->pool ().stack_size ();
00431
00432 // Make sure the dynamically created stack size array is properly
00433 // deleted.
00434 ACE_Auto_Basic_Array_Ptr<size_t> auto_stack_size_array (stack_size_array);
00435
00436 TAO_ORB_Core &orb_core =
00437 this->pool ().manager ().orb_core ();
00438
00439 long flags =
00440 thread_flags |
00441 orb_core.orb_params ()->thread_creation_flags ();
00442
00443 // Activate the threads.
00444 int result =
00445 thread_pool.activate (flags,
00446 number_of_threads,
00447 force_active,
00448 this->native_priority_,
00449 default_grp_id,
00450 default_task,
00451 default_thread_handles,
00452 default_stack,
00453 stack_size_array);
00454
00455 if (result != 0)
00456 return result;
00457
00458 return result;
00459 }
|
|
|
Definition at line 367 of file Thread_Pool.cpp. References ACE_GUARD_RETURN, ACE_SYNCH_MUTEX, dynamic_threads_, static_threads_, and ACE_Task_Base::thr_count().
00368 {
00369 ACE_GUARD_RETURN (ACE_SYNCH_MUTEX,
00370 mon,
00371 this->lock_,
00372 0);
00373
00374 return (this->static_threads_.thr_count () +
00375 this->dynamic_threads_.thr_count ());
00376 }
|
|
|
Definition at line 65 of file Thread_Pool.inl. Referenced by TAO_Dynamic_Thread_Pool_Threads::run().
00066 {
00067 return this->dynamic_thread_idle_timeout_;
00068 }
|
|
|
Definition at line 51 of file Thread_Pool.inl. References dynamic_threads_number_.
00052 {
00053 return this->dynamic_threads_number_;
00054 }
|
|
|
Finalize the resources.
Definition at line 341 of file Thread_Pool.cpp. References TAO_Thread_Lane_Resources::finalize(), and resources_. Referenced by TAO_Thread_Pool::finalize().
00342 {
00343 // Finalize resources.
00344 this->resources_.finalize ();
00345 }
|
|
|
Definition at line 16 of file Thread_Pool.inl. Referenced by open(), and TAO_Dynamic_Thread_Pool_Threads::run().
00017 {
00018 return this->id_;
00019 }
|
|
|
Does mprofile belong to us?
Definition at line 361 of file Thread_Pool.cpp. References TAO_Thread_Lane_Resources::is_collocated(), and resources_. Referenced by TAO_Thread_Pool::is_collocated().
00362 {
00363 return this->resources_.is_collocated (mprofile);
00364 }
|
|
|
Definition at line 30 of file Thread_Pool.inl. References lane_priority_.
00031 {
00032 return this->lane_priority_;
00033 }
|
|
|
Definition at line 37 of file Thread_Pool.inl. References native_priority_.
00038 {
00039 return this->native_priority_;
00040 }
|
|
|
It can be that no thread can be created because the number of threads is equal to the maximum we can have or the Thread Lane is shutting down.
Definition at line 167 of file Thread_Pool.cpp. References ACE_DEBUG, ACE_ERROR_RETURN, ACE_GUARD_RETURN, ACE_SYNCH_MUTEX, ACE_TEXT, create_threads_i(), dynamic_threads_, dynamic_threads_number_, TAO_ORB_Core::has_shutdown(), LM_DEBUG, LM_ERROR, TAO_Thread_Pool::manager(), TAO_Thread_Pool_Manager::orb_core(), shutdown_, static_threads_number_, TAO_debug_level, and ACE_Task_Base::thr_count(). Referenced by TAO_RT_New_Leader_Generator::no_leaders_available().
00168 {
00169 // Note that we are checking this condition below without the lock
00170 // held.
00171 if (this->dynamic_threads_.thr_count () >= this->dynamic_threads_number_)
00172 return false;
00173
00174 ACE_GUARD_RETURN (ACE_SYNCH_MUTEX,
00175 mon,
00176 this->lock_,
00177 false);
00178
00179 TAO_Thread_Pool_Manager &manager =
00180 this->pool_.manager ();
00181
00182 if (!manager.orb_core ().has_shutdown () && !this->shutdown_&&
00183 this->dynamic_threads_.thr_count () < this->dynamic_threads_number_)
00184 {
00185 if (TAO_debug_level > 0)
00186 ACE_DEBUG ((LM_DEBUG,
00187 ACE_TEXT ("TAO Process %P Pool %d Lane %d Thread %t\n")
00188 ACE_TEXT ("Current number of dynamic threads = %d; ")
00189 ACE_TEXT ("static threads = %d; max dynamic threads = %d\n")
00190 ACE_TEXT ("No leaders available; creating new leader!\n"),
00191 this->pool_.id (),
00192 this->id_,
00193 this->dynamic_threads_.thr_count (),
00194 this->static_threads_number_,
00195 this->dynamic_threads_number_));
00196
00197 int result =
00198 this->create_threads_i (this->dynamic_threads_,
00199 1,
00200 THR_BOUND | THR_DETACHED);
00201
00202 if (result != 0)
00203 ACE_ERROR_RETURN ((LM_ERROR,
00204 ACE_TEXT ("Pool %d Lane %d Thread %t: ")
00205 ACE_TEXT ("cannot create dynamic thread\n"),
00206 this->pool_.id (),
00207 this->id_),
00208 false);
00209 }
00210
00211 return true;
00212 }
|
|
|
Open the lane.
Definition at line 280 of file Thread_Pool.cpp. References ACE_CHECK, ACE_ENV_ARG_PARAMETER, ACE_ENV_SINGLE_ARG_PARAMETER, ACE_THROW, TAO_ORB_Parameters::get_endpoint_set(), id(), TAO_Thread_Pool::manager(), TAO_Thread_Lane_Resources::open_acceptor_registry(), TAO_Thread_Pool_Manager::orb_core(), TAO_ORB_Core::orb_params(), pool(), resources_, ACE_OS::sprintf(), TAO_ACCEPTOR_REGISTRY_OPEN_LOCATION_CODE, TAO_DEFAULT_LANE, TAO_EndpointSet, and validate_and_map_priority(). Referenced by TAO_Thread_Pool::open().
00281 {
00282 // Validate and map priority.
00283 this->validate_and_map_priority (ACE_ENV_SINGLE_ARG_PARAMETER);
00284 ACE_CHECK;
00285
00286 // Create a string with the pool:thread id.
00287 char pool_lane_id[10];
00288 ACE_OS::sprintf (pool_lane_id,
00289 "%d:%d",
00290 this->pool ().id (),
00291 this->id ());
00292
00293 TAO_ORB_Parameters *params =
00294 this->pool ().manager ().orb_core ().orb_params ();
00295
00296 TAO_EndpointSet endpoint_set;
00297 bool ignore_address;
00298
00299 // Get the endpoints for this lane.
00300 params->get_endpoint_set (pool_lane_id,
00301 endpoint_set);
00302
00303 if (endpoint_set.is_empty ())
00304 {
00305 // If endpoints are not specified for this lane, use the
00306 // endpoints specified for the default lane but ignore their
00307 // addresses.
00308 params->get_endpoint_set (TAO_DEFAULT_LANE,
00309 endpoint_set);
00310
00311 ignore_address = true;
00312 }
00313 else
00314 {
00315 // If endpoints are specified for this lane, use them with thier
00316 // addresses.
00317 ignore_address = false;
00318 }
00319
00320 // Open the acceptor registry.
00321 int result = 0;
00322 result =
00323 this->resources_.open_acceptor_registry (endpoint_set,
00324 ignore_address
00325 ACE_ENV_ARG_PARAMETER);
00326 ACE_CHECK;
00327
00328 if (result == -1)
00329 ACE_THROW (CORBA::INTERNAL (
00330 CORBA::SystemException::_tao_minor_code (
00331 TAO_ACCEPTOR_REGISTRY_OPEN_LOCATION_CODE,
00332 0),
00333 CORBA::COMPLETED_NO));
00334 }
|
|
|
Definition at line 23 of file Thread_Pool.inl. Referenced by create_threads_i(), open(), and TAO_Thread_Pool_Threads::svc().
00024 {
00025 return this->pool_;
00026 }
|
|
|
Definition at line 58 of file Thread_Pool.inl. References resources_. Referenced by TAO_RT_Thread_Lane_Resources_Manager::lane_resources().
00059 {
00060 return this->resources_;
00061 }
|
|
|
Shutdown the reactor.
Definition at line 348 of file Thread_Pool.cpp. References resources_, and TAO_Thread_Lane_Resources::shutdown_reactor(). Referenced by TAO_Thread_Pool::shutdown_reactor().
00349 {
00350 this->resources_.shutdown_reactor ();
00351 }
|
|
|
Mark that this lane is shutting down, we then don't create any dynamic threads anymore. When the pool is shutting down the leader follower loop is called which can cause a request to create a new dynamic thread but we shouldn't create a new one. Definition at line 215 of file Thread_Pool.cpp. References ACE_GUARD, ACE_SYNCH_MUTEX, and shutdown_. Referenced by TAO_Thread_Pool::shutting_down().
|
|
|
Definition at line 44 of file Thread_Pool.inl. References static_threads_number_.
00045 {
00046 return this->static_threads_number_;
00047 }
|
|
|
Validate lane's priority and map it to a native value.
Definition at line 227 of file Thread_Pool.cpp. References TAO_Priority_Mapping_Manager::_narrow(), ACE_CHECK, ACE_DEBUG, ACE_ENV_ARG_PARAMETER, ACE_TEXT, ACE_THROW, TAO_Priority_Mapping_Manager_var::in(), lane_priority_, LM_DEBUG, TAO_Thread_Pool::manager(), TAO_Priority_Mapping_Manager::mapping(), TAO_ORB_Core::orb(), TAO_Thread_Pool_Manager::orb_core(), static_threads_number_, TAO_debug_level, and TAO_OBJID_PRIORITYMAPPINGMANAGER. Referenced by open().
00228 {
00229 // Make sure that static_threads_number_ is not zero.
00230 if (this->static_threads_number_ == 0)
00231 ACE_THROW (CORBA::BAD_PARAM ());
00232
00233 // Check that the priority is in bounds.
00234 if (this->lane_priority_ < RTCORBA::minPriority
00235 // The line below will always be false unless the value of
00236 // RTCORBA::maxPriority, which is now assigned the value of
00237 // 32767, is changed in RTCORBA.pidl.
00238 // || this->lane_priority_ > RTCORBA::maxPriority
00239 )
00240 {
00241 ACE_THROW (CORBA::BAD_PARAM ());
00242 }
00243
00244 CORBA::ORB_ptr orb =
00245 this->pool_.manager ().orb_core ().orb ();
00246
00247 // Get the priority mapping manager.
00248 CORBA::Object_var obj =
00249 orb->resolve_initial_references (TAO_OBJID_PRIORITYMAPPINGMANAGER
00250 ACE_ENV_ARG_PARAMETER);
00251 ACE_CHECK;
00252
00253 TAO_Priority_Mapping_Manager_var mapping_manager =
00254 TAO_Priority_Mapping_Manager::_narrow (obj.in ()
00255 ACE_ENV_ARG_PARAMETER);
00256 ACE_CHECK;
00257
00258 RTCORBA::PriorityMapping *pm =
00259 mapping_manager.in ()->mapping ();
00260
00261 // Map CORBA priority to native priority.
00262 CORBA::Boolean result =
00263 pm->to_native (this->lane_priority_,
00264 this->native_priority_);
00265
00266 if (!result)
00267 ACE_THROW (CORBA::DATA_CONVERSION ());
00268
00269 if (TAO_debug_level > 3)
00270 {
00271 ACE_DEBUG ((LM_DEBUG,
00272 ACE_TEXT ("TAO (%P|%t) - creating thread at ")
00273 ACE_TEXT ("(corba:native) priority %d:%d\n"),
00274 this->lane_priority_,
00275 this->native_priority_));
00276 }
00277 }
|
|
|
Wait for threads to exit.
Definition at line 354 of file Thread_Pool.cpp. References dynamic_threads_, static_threads_, and ACE_Task_Base::wait(). Referenced by TAO_Thread_Pool::wait().
00355 {
00356 this->static_threads_.wait ();
00357 this->dynamic_threads_.wait ();
00358 }
|
|
|
Definition at line 241 of file Thread_Pool.h. |
|
|
Array with all dynamic threads.
Definition at line 233 of file Thread_Pool.h. Referenced by current_threads(), new_dynamic_thread(), and wait(). |
|
|
Maximum number of threads we are allowed to create.
Definition at line 227 of file Thread_Pool.h. Referenced by dynamic_threads(), and new_dynamic_thread(). |
|
|
The id of this lane.
Definition at line 215 of file Thread_Pool.h. |
|
|
Definition at line 217 of file Thread_Pool.h. Referenced by lane_priority(), and validate_and_map_priority(). |
|
|
Lock to guard all members of the lane.
Definition at line 244 of file Thread_Pool.h. |
|
|
Definition at line 239 of file Thread_Pool.h. Referenced by native_priority(). |
|
|
Definition at line 235 of file Thread_Pool.h. |
|
|
The Thread Pool to which this lane belongs.
Definition at line 212 of file Thread_Pool.h. |
|
|
Definition at line 237 of file Thread_Pool.h. Referenced by finalize(), is_collocated(), open(), resources(), and shutdown_reactor(). |
|
|
This boolean is set when we are shutting down, then we will not create any new dynamic threads Definition at line 221 of file Thread_Pool.h. Referenced by new_dynamic_thread(), and shutting_down(). |
|
|
Array with all static threads.
Definition at line 230 of file Thread_Pool.h. Referenced by current_threads(), and wait(). |
|
|
Number of static threads.
Definition at line 224 of file Thread_Pool.h. Referenced by new_dynamic_thread(), static_threads(), and validate_and_map_priority(). |
 1.3.6
1.3.6