#include <CEC_Reactive_Pulling_Strategy.h>
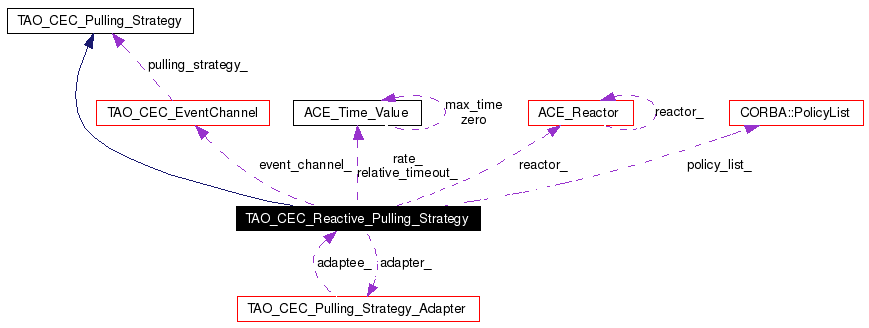
Inheritance diagram for TAO_CEC_Reactive_Pulling_Strategy:
Public Member Functions | |
| TAO_CEC_Reactive_Pulling_Strategy (const ACE_Time_Value &rate, const ACE_Time_Value &relative_timeout, TAO_CEC_EventChannel *event_channel, CORBA::ORB_ptr orb) | |
| void | handle_timeout (const ACE_Time_Value &tv, const void *arg) |
| Receive the timeout from the adapter. | |
| virtual void | activate (void) |
| virtual void | shutdown (void) |
Private Attributes | |
| TAO_CEC_Pulling_Strategy_Adapter | adapter_ |
| The Adapter for the reactor events. | |
| ACE_Time_Value | rate_ |
| The polling rate. | |
| ACE_Time_Value | relative_timeout_ |
| The relative timeout. | |
| TAO_CEC_EventChannel * | event_channel_ |
| The event channel. | |
| CORBA::ORB_var | orb_ |
| The ORB. | |
| CORBA::PolicyCurrent_var | policy_current_ |
| To control the timeout policy in the thread. | |
| CORBA::PolicyList | policy_list_ |
| Precomputed policy list to the set timeout. | |
| ACE_Reactor * | reactor_ |
| The ORB reactor. | |
| long | timer_id_ |
| The timer id. | |
The events are dispatched in FIFO ordering, using the invoking thread to push the event to the consumer.
Definition at line 75 of file CEC_Reactive_Pulling_Strategy.h.
|
||||||||||||||||||||
|
The scheduler is used to find the range of priorities and similar info. Definition at line 29 of file CEC_Reactive_Pulling_Strategy.cpp. References TAO_HAS_CORBA_MESSAGING.
00033 : adapter_ (this), 00034 rate_ (rate), 00035 relative_timeout_ (relative_timeout), 00036 event_channel_ (event_channel), 00037 orb_ (CORBA::ORB::_duplicate (orb)) 00038 #if defined (TAO_HAS_CORBA_MESSAGING) && TAO_HAS_CORBA_MESSAGING != 0 00039 // Initialise timer_id_ to an invalid timer id, so that in case we don't 00040 // schedule a timer, we don't cancel a random timer at shutdown 00041 , timer_id_ (-1) 00042 #endif /* TAO_HAS_CORBA_MESSAGING */ 00043 { 00044 this->reactor_ = 00045 this->orb_->orb_core ()->reactor (); 00046 } |
|
|
Initialize all the data structures, activate any internal threads, etc. Implements TAO_CEC_Pulling_Strategy. Definition at line 102 of file CEC_Reactive_Pulling_Strategy.cpp. References CORBA::PolicyCurrent::_narrow(), ACE_CATCHANY, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_TRY_CHECK, ACE_TRY_NEW_ENV, TAO::unbounded_object_reference_sequence< Policy, Policy_var >::length(), and ACE_Reactor::schedule_timer().
00103 {
00104 #if defined (TAO_HAS_CORBA_MESSAGING) && TAO_HAS_CORBA_MESSAGING != 0
00105 timer_id_ = this->reactor_->schedule_timer (&this->adapter_,
00106 0,
00107 this->rate_,
00108 this->rate_);
00109 if (timer_id_ == -1)
00110 return;
00111
00112 ACE_TRY_NEW_ENV
00113 {
00114 // Get the PolicyCurrent object
00115 CORBA::Object_var tmp =
00116 this->orb_->resolve_initial_references ("PolicyCurrent"
00117 ACE_ENV_ARG_PARAMETER);
00118 ACE_TRY_CHECK;
00119
00120 this->policy_current_ =
00121 CORBA::PolicyCurrent::_narrow (tmp.in ()
00122 ACE_ENV_ARG_PARAMETER);
00123 ACE_TRY_CHECK;
00124
00125 // Pre-compute the policy list to the set the right timeout
00126 // value...
00127 // We need to convert the relative timeout into 100's of nano seconds.
00128 TimeBase::TimeT timeout;
00129 ORBSVCS_Time::Time_Value_to_TimeT (timeout,
00130 this->relative_timeout_);
00131 CORBA::Any any;
00132 any <<= timeout;
00133
00134 this->policy_list_.length (1);
00135 this->policy_list_[0] =
00136 this->orb_->create_policy (
00137 Messaging::RELATIVE_RT_TIMEOUT_POLICY_TYPE,
00138 any
00139 ACE_ENV_ARG_PARAMETER);
00140 ACE_TRY_CHECK;
00141 }
00142 ACE_CATCHANY
00143 {
00144 }
00145 ACE_ENDTRY;
00146 #endif /* TAO_HAS_CORBA_MESSAGING */
00147 }
|
|
||||||||||||
|
Receive the timeout from the adapter.
Definition at line 49 of file CEC_Reactive_Pulling_Strategy.cpp. References ACE_CATCHANY, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_ENV_SINGLE_ARG_PARAMETER, ACE_TRY_CHECK, ACE_TRY_CHECK_EX, ACE_TRY_EX, ACE_TRY_NEW_ENV, TAO_CEC_SupplierAdmin::for_each(), TAO_CEC_EventChannel::supplier_admin(), and TAO_CEC_EventChannel::supplier_control(). Referenced by TAO_CEC_Pulling_Strategy_Adapter::handle_timeout().
00052 {
00053 ACE_TRY_NEW_ENV
00054 {
00055 // Query the state of the Current object *before* we initiate
00056 // the iteration...
00057 CORBA::PolicyTypeSeq types;
00058 CORBA::PolicyList_var policies =
00059 this->policy_current_->get_policy_overrides (types
00060 ACE_ENV_ARG_PARAMETER);
00061 ACE_TRY_CHECK;
00062
00063 // Change the timeout
00064 this->policy_current_->set_policy_overrides (this->policy_list_,
00065 CORBA::ADD_OVERRIDE
00066 ACE_ENV_ARG_PARAMETER);
00067 ACE_TRY_CHECK;
00068
00069 ACE_TRY_EX (query)
00070 {
00071 TAO_CEC_Pull_Event worker (this->event_channel_->consumer_admin (),
00072 this->event_channel_->supplier_control ());
00073
00074 this->event_channel_->supplier_admin ()->for_each (&worker
00075 ACE_ENV_ARG_PARAMETER);
00076 ACE_TRY_CHECK_EX (query);
00077 }
00078 ACE_CATCHANY
00079 {
00080 // Ignore all exceptions
00081 }
00082 ACE_ENDTRY;
00083
00084 this->policy_current_->set_policy_overrides (policies.in (),
00085 CORBA::SET_OVERRIDE
00086 ACE_ENV_ARG_PARAMETER);
00087 ACE_TRY_CHECK;
00088 for (CORBA::ULong i = 0; i != policies->length (); ++i)
00089 {
00090 policies[i]->destroy (ACE_ENV_SINGLE_ARG_PARAMETER);
00091 ACE_TRY_CHECK;
00092 }
00093 }
00094 ACE_CATCHANY
00095 {
00096 // Ignore all exceptions
00097 }
00098 ACE_ENDTRY;
00099 }
|
|
|
Deactivate any internal threads and cleanup internal data structures, it should only return once the threads have finished their jobs. Implements TAO_CEC_Pulling_Strategy. Definition at line 150 of file CEC_Reactive_Pulling_Strategy.cpp. References ACE_Reactor::cancel_timer(), and ACE_Event_Handler::reactor().
00151 {
00152 #if defined (TAO_HAS_CORBA_MESSAGING) && TAO_HAS_CORBA_MESSAGING != 0
00153 this->reactor_->cancel_timer (timer_id_);
00154 #endif /* TAO_HAS_CORBA_MESSAGING */
00155 this->adapter_.reactor (0);
00156 }
|
|
|
The Adapter for the reactor events.
Definition at line 95 of file CEC_Reactive_Pulling_Strategy.h. |
|
|
The event channel.
Definition at line 104 of file CEC_Reactive_Pulling_Strategy.h. |
|
|
The ORB.
Definition at line 107 of file CEC_Reactive_Pulling_Strategy.h. |
|
|
To control the timeout policy in the thread.
Definition at line 110 of file CEC_Reactive_Pulling_Strategy.h. |
|
|
Precomputed policy list to the set timeout.
Definition at line 113 of file CEC_Reactive_Pulling_Strategy.h. |
|
|
The polling rate.
Definition at line 98 of file CEC_Reactive_Pulling_Strategy.h. |
|
|
The ORB reactor.
Definition at line 116 of file CEC_Reactive_Pulling_Strategy.h. |
|
|
The relative timeout.
Definition at line 101 of file CEC_Reactive_Pulling_Strategy.h. |
|
|
The timer id.
Definition at line 120 of file CEC_Reactive_Pulling_Strategy.h. |
 1.3.6
1.3.6