
#include <Endpoint_Strategy_T.h>
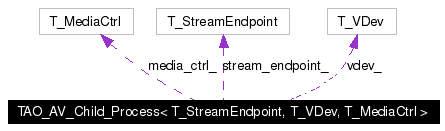
Inheritance diagram for TAO_AV_Child_Process< T_StreamEndpoint, T_VDev, T_MediaCtrl >:
Public Member Functions | |
| TAO_AV_Child_Process () | |
| Constructor. | |
| virtual | ~TAO_AV_Child_Process () |
| Destructor. | |
| int | init (int argc, char **argv, CORBA::ORB_ptr orb, PortableServer::POA_ptr poa) |
| int | run (ACE_Time_Value *tv=0) |
| runs the ORB event loop | |
Protected Member Functions | |
| int | activate_objects (int argc, char **argv ACE_ENV_ARG_DECL) |
| char * | activate_with_poa (PortableServer::Servant servant ACE_ENV_ARG_DECL) |
| activate the servant with the poa | |
| int | unbind_names (void) |
| Removes the vdev and streamendpoint names from the naming service. | |
| int | bind_to_naming_service (ACE_ENV_SINGLE_ARG_DECL) |
| Binds to the naming service. | |
| int | register_vdev (ACE_ENV_SINGLE_ARG_DECL) |
| Registers vdev with the naming service. | |
| int | register_stream_endpoint (ACE_ENV_SINGLE_ARG_DECL) |
| Registers stream_endpoint with the naming service. | |
| int | release_semaphore () |
| Releases the semaphore on which the parent is waiting on. | |
| virtual int | make_vdev (T_VDev *&vdev) |
| virtual int | make_stream_endpoint (T_StreamEndpoint *&stream_endpoint) |
| virtual int | make_mediactrl (T_MediaCtrl *&media_ctrl) |
Protected Attributes | |
| CosNaming::NamingContext_var | naming_context_ |
| The root Naming Context of the TAO naming service. | |
| CosNaming::Name | vdev_name_ |
| Name of the vdev. | |
| CosNaming::Name | stream_endpoint_name_ |
| Name of the stream_endpoint. | |
| T_StreamEndpoint * | stream_endpoint_ |
| The stream endpoint member. | |
| T_VDev * | vdev_ |
| The virtual device. | |
| CORBA::Object_var | vdev_obj_ |
| Virtual device CORBA object reference. | |
| T_MediaCtrl * | media_ctrl_ |
| Media controller. | |
| CORBA::Object_var | media_ctrl_obj_ |
| pid_t | pid_ |
| pid of this process | |
| char | host_ [MAXHOSTNAMELEN] |
| Name of the host. | |
| CORBA::ORB_ptr | orb_ |
| PortableServer::POA_ptr | poa_ |
Definition at line 152 of file Endpoint_Strategy_T.h.
|
|||||||||
|
Constructor.
Definition at line 382 of file Endpoint_Strategy_T.cpp. References ACE_ERROR, ACE_OS::getpid(), ACE_OS::hostname(), and LM_ERROR.
00383 : stream_endpoint_name_ (0), 00384 pid_ (-1) 00385 { 00386 this->pid_ = ACE_OS::getpid (); 00387 if (this->pid_ == 0) 00388 ACE_ERROR ((LM_ERROR,"getpid () failed\n")); 00389 ACE_OS::hostname (this->host_, 00390 sizeof this->host_); 00391 } |
|
|||||||||
|
Destructor.
Definition at line 778 of file Endpoint_Strategy_T.cpp. References TAO_AV_Child_Process< T_StreamEndpoint, T_VDev, T_MediaCtrl >::unbind_names().
00779 {
00780 this->unbind_names ();
00781 }
|
|
||||||||||||||||
|
Creates the objects and inserts them into the Naming Service, so the parent can pick the IOR's and return them to the client |
|
||||||||||
|
activate the servant with the poa
Definition at line 444 of file Endpoint_Strategy_T.cpp. References ACE_CHECK_RETURN, ACE_ENV_ARG_DECL, and ACE_ENV_ARG_PARAMETER.
00446 {
00447
00448 PortableServer::ObjectId_var id =
00449 this->poa_->activate_object (servant
00450 ACE_ENV_ARG_PARAMETER);
00451 ACE_CHECK_RETURN (0);
00452
00453 CORBA::Object_var obj =
00454 this->poa_->id_to_reference (id.in ()
00455 ACE_ENV_ARG_PARAMETER);
00456 ACE_CHECK_RETURN (0);
00457
00458 CORBA::String_var str =
00459 this->orb_->object_to_string (obj.in ()
00460 ACE_ENV_ARG_PARAMETER);
00461 ACE_CHECK_RETURN (0);
00462
00463 return str._retn ();
00464 }
|
|
||||||||||
|
Binds to the naming service.
Definition at line 523 of file Endpoint_Strategy_T.cpp. References ACE_ANY_EXCEPTION, ACE_CATCHANY, ACE_CHECK_RETURN, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_ENV_SINGLE_ARG_DECL, ACE_ERROR_RETURN, ACE_PRINT_EXCEPTION, ACE_TRY, ACE_TRY_CHECK, CORBA::is_nil(), and LM_ERROR.
00524 {
00525 ACE_TRY
00526 {
00527 CORBA::Object_var naming_obj =
00528 this->orb_->resolve_initial_references ("NameService" ACE_ENV_ARG_PARAMETER);
00529 ACE_TRY_CHECK;
00530 if (CORBA::is_nil (naming_obj.in ()))
00531 ACE_ERROR_RETURN ((LM_ERROR,
00532 " (%P|%t) Unable to resolve the Name Service.\n"),
00533 -1);
00534 // if (TAO_debug_level > 0) ACE_DEBUG ((LM_DEBUG, "(%P|%t) %s:%d\n", __FILE__, __LINE__));
00535 this->naming_context_ =
00536 CosNaming::NamingContext::_narrow (naming_obj.in ()
00537 ACE_ENV_ARG_PARAMETER);
00538 ACE_TRY_CHECK;
00539 }
00540 ACE_CATCHANY
00541 {
00542 ACE_PRINT_EXCEPTION (ACE_ANY_EXCEPTION,"TAO_AV_Child_Process::bind_to_naming_service");
00543 return -1;
00544 }
00545 ACE_ENDTRY;
00546 ACE_CHECK_RETURN (-1);
00547 return 0;
00548 }
|
|
||||||||||||||||||||||||
|
Initializes the ORB, creates and activates the T_StreamEndpoint, T_VDev, T_MediaCtrl in the POA Definition at line 396 of file Endpoint_Strategy_T.cpp. References ACE_ANY_EXCEPTION, ACE_CATCHANY, ACE_DECLARE_NEW_CORBA_ENV, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_ENV_SINGLE_ARG_PARAMETER, ACE_ERROR_RETURN, ACE_PRINT_EXCEPTION, ACE_TRY, ACE_TRY_CHECK, and LM_ERROR.
00400 {
00401 ACE_DECLARE_NEW_CORBA_ENV;
00402 ACE_TRY
00403 {
00404 this->orb_ = orb;
00405
00406 this->poa_ = poa;
00407
00408 // create the objects and activate them in the poa
00409 this->activate_objects (argc,
00410 argv
00411 ACE_ENV_ARG_PARAMETER);
00412 ACE_TRY_CHECK;
00413
00414 // Get ourselves a naming_service object reference
00415 this->bind_to_naming_service (ACE_ENV_SINGLE_ARG_PARAMETER);
00416 ACE_TRY_CHECK;
00417
00418 // Register the vdev with the naming service
00419 this->register_vdev (ACE_ENV_SINGLE_ARG_PARAMETER);
00420 ACE_TRY_CHECK;
00421
00422 // register the stream_endpoing with the naming_service
00423 this->register_stream_endpoint (ACE_ENV_SINGLE_ARG_PARAMETER);
00424 ACE_TRY_CHECK;
00425 }
00426 ACE_CATCHANY
00427 {
00428 ACE_PRINT_EXCEPTION (ACE_ANY_EXCEPTION,"TAO_Child_Process");
00429 return -1;
00430 }
00431 ACE_ENDTRY;
00432
00433 // release the semaphore the parent is waiting on
00434 if (this->release_semaphore () == -1)
00435 ACE_ERROR_RETURN ((LM_ERROR,
00436 "(%P|%t) Error releasing semaphores\n"),
00437 -1);
00438
00439 return 0;
00440 }
|
|
||||||||||
|
Bridge method to create a media_ctrl, a la Acceptor. Applications can override this Definition at line 734 of file Endpoint_Strategy_T.cpp. References ACE_DEBUG, ACE_NEW_RETURN, LM_DEBUG, and TAO_debug_level.
00735 {
00736 if (TAO_debug_level > 0) ACE_DEBUG ((LM_DEBUG,"(%P|%t) TAO_AV_Child_Process::make_mediactrl ()\n"));
00737 ACE_NEW_RETURN (media_ctrl,
00738 T_MediaCtrl,
00739 -1);
00740 return 0;
00741 }
|
|
||||||||||
|
Bridge method to create a stream_endpoint, a la Acceptor. Applications can override this Definition at line 712 of file Endpoint_Strategy_T.cpp. References ACE_NEW_RETURN.
00713 {
00714 ACE_NEW_RETURN (stream_endpoint,
00715 T_StreamEndpoint,
00716 -1);
00717 return 0;
00718 }
|
|
||||||||||
|
Bridge method to create a vdev, a la Acceptor. Applications can override this Definition at line 723 of file Endpoint_Strategy_T.cpp. References ACE_NEW_RETURN.
00724 {
00725 ACE_NEW_RETURN (vdev,
00726 T_VDev,
00727 -1);
00728 return 0;
00729 }
|
|
||||||||||
|
Registers stream_endpoint with the naming service.
Definition at line 675 of file Endpoint_Strategy_T.cpp. References CORBA::Object::_nil(), ACE_ANY_EXCEPTION, ACE_CATCH, ACE_CATCHANY, ACE_CHECK_RETURN, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_ENV_SINGLE_ARG_DECL, ACE_ENV_SINGLE_ARG_PARAMETER, ACE_PRINT_EXCEPTION, ACE_TRY, and ACE_TRY_CHECK.
00676 {
00677 CORBA::Object_ptr stream_endpoint_obj = CORBA::Object::_nil ();
00678 ACE_TRY
00679 {
00680 stream_endpoint_obj = this->stream_endpoint_->_this (ACE_ENV_SINGLE_ARG_PARAMETER);
00681 ACE_TRY_CHECK;
00682
00683 // Create a name for the video control object
00684 // subclasses can define their own name for the streamendpoint
00685 // Register the stream endpoint object with the naming server.
00686 this->naming_context_->bind (this->stream_endpoint_name_,
00687 stream_endpoint_obj
00688 ACE_ENV_ARG_PARAMETER);
00689 ACE_TRY_CHECK;
00690 }
00691 ACE_CATCH (CosNaming::NamingContext::AlreadyBound,ex)
00692 {
00693 // if the name was already there, replace the reference with the new one
00694 this->naming_context_->rebind (this->stream_endpoint_name_,
00695 stream_endpoint_obj
00696 ACE_ENV_ARG_PARAMETER);
00697 ACE_TRY_CHECK;
00698 }
00699 ACE_CATCHANY
00700 {
00701 ACE_PRINT_EXCEPTION (ACE_ANY_EXCEPTION,"TAO_Endpoint_Reactive_Strategy::activate");
00702 return -1;
00703 }
00704 ACE_ENDTRY;
00705 ACE_CHECK_RETURN (-1);
00706 return 0;
00707 }
|
|
||||||||||
|
Registers vdev with the naming service.
Definition at line 553 of file Endpoint_Strategy_T.cpp. References ACE_ANY_EXCEPTION, ACE_CATCH, ACE_CATCHANY, ACE_CHECK_RETURN, ACE_DEBUG, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_ENV_SINGLE_ARG_DECL, ACE_ENV_SINGLE_ARG_PARAMETER, ACE_PRINT_EXCEPTION, ACE_TRY, ACE_TRY_CHECK, ACE_TRY_CHECK_EX, ACE_TRY_EX, LM_DEBUG, ACE_OS::sprintf(), CORBA::string_dup(), and TAO_debug_level.
00554 {
00555 ACE_TRY
00556 {
00557 char vdev_name [BUFSIZ];
00558 ACE_OS::sprintf (vdev_name,
00559 "%s:%s:%ld",
00560 "VDev",
00561 this->host_,
00562 static_cast<long> (this->pid_));
00563
00564 if (TAO_debug_level > 0) ACE_DEBUG ((LM_DEBUG,"(%P|%t)%s\n",vdev_name));
00565 // create the name
00566 this->vdev_name_.length (1);
00567 this->vdev_name_ [0].id = CORBA::string_dup (vdev_name);
00568
00569 // make the media controller a property of the vdev
00570 CORBA::Any media_ctrl_property;
00571 media_ctrl_obj_ =
00572 this->media_ctrl_->_this (ACE_ENV_SINGLE_ARG_PARAMETER);
00573 ACE_TRY_CHECK;
00574
00575 this->vdev_->define_property ("Related_MediaCtrl",
00576 media_ctrl_obj_.in()
00577 ACE_ENV_ARG_PARAMETER);
00578 ACE_TRY_CHECK;
00579
00580 vdev_obj_ = this->vdev_->_this (ACE_ENV_SINGLE_ARG_PARAMETER);
00581 ACE_TRY_CHECK;
00582
00583 ACE_TRY_CHECK;
00584 ACE_TRY_EX (bind)
00585 {
00586 // Register the vdev with the naming server.
00587 this->naming_context_->bind (this->vdev_name_,
00588 vdev_obj_.in()
00589 ACE_ENV_ARG_PARAMETER);
00590 ACE_TRY_CHECK_EX (bind);
00591 }
00592 ACE_CATCH (CosNaming::NamingContext::AlreadyBound,ex)
00593 {
00594 // If the object was already there, replace the older reference
00595 // with this one
00596 this->naming_context_->rebind (this->vdev_name_,
00597 vdev_obj_.in()
00598 ACE_ENV_ARG_PARAMETER);
00599 ACE_TRY_CHECK;
00600 }
00601 ACE_CATCHANY
00602 {
00603 ACE_PRINT_EXCEPTION (ACE_ANY_EXCEPTION,"TAO_AV_Child_Process::register_vdev");
00604 return -1;
00605 }
00606 ACE_ENDTRY;
00607 ACE_CHECK_RETURN (-1);
00608 }
00609 ACE_CATCHANY
00610 {
00611 ACE_PRINT_EXCEPTION (ACE_ANY_EXCEPTION,"TAO_AV_Child_Process::register_vdev");
00612 return -1;
00613 }
00614 ACE_ENDTRY;
00615 ACE_CHECK_RETURN (-1);
00616 return 0;
00617 }
|
|
|||||||||
|
Releases the semaphore on which the parent is waiting on.
Definition at line 642 of file Endpoint_Strategy_T.cpp. References ACE_DEBUG, ACE_ERROR_RETURN, LM_DEBUG, LM_ERROR, ACE_Process_Semaphore::release(), and TAO_debug_level.
00643 {
00644 char sem_str [BUFSIZ];
00645
00646 long pid = this->pid_;
00647 sprintf (sem_str,
00648 "%s:%s:%ld",
00649 "TAO_AV_Process_Semaphore",
00650 this->host_,
00651 pid);
00652
00653 if (TAO_debug_level > 0) ACE_DEBUG ((LM_DEBUG,
00654 "(%P|%t) semaphore is %s\n",
00655 sem_str));
00656
00657 // Release the lock on which the server is waiting
00658 ACE_Process_Semaphore semaphore (0, // 0 means that the semaphore is
00659 // initially locked
00660 sem_str);
00661
00662 if (semaphore.release () == -1)
00663 ACE_ERROR_RETURN ((LM_ERROR,
00664 "(%P|%t) Error releasing semaphore %s: %p\n",
00665 sem_str,
00666 "semaphore.release ()"),
00667 -1);
00668
00669 return 0;
00670 }
|
|
||||||||||
|
runs the ORB event loop
Definition at line 622 of file Endpoint_Strategy_T.cpp. References ACE_ANY_EXCEPTION, ACE_CATCHANY, ACE_DECLARE_NEW_CORBA_ENV, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_PRINT_EXCEPTION, ACE_TRY, and ACE_TRY_CHECK.
00623 {
00624 ACE_DECLARE_NEW_CORBA_ENV;
00625 ACE_TRY
00626 {
00627 this->orb_->run (tv ACE_ENV_ARG_PARAMETER);
00628 ACE_TRY_CHECK;
00629 }
00630 ACE_CATCHANY
00631 {
00632 ACE_PRINT_EXCEPTION (ACE_ANY_EXCEPTION,"orb.run ()");
00633 return -1;
00634 }
00635 ACE_ENDTRY;
00636 return 0;
00637 }
|
|
||||||||||
|
Removes the vdev and streamendpoint names from the naming service.
Definition at line 746 of file Endpoint_Strategy_T.cpp. References ACE_ANY_EXCEPTION, ACE_CATCHANY, ACE_CHECK_RETURN, ACE_DECLARE_NEW_CORBA_ENV, ACE_ENDTRY, ACE_ENV_ARG_PARAMETER, ACE_PRINT_EXCEPTION, ACE_TRY, ACE_TRY_CHECK, and CORBA::is_nil(). Referenced by TAO_AV_Child_Process< T_StreamEndpoint, T_VDev, T_MediaCtrl >::~TAO_AV_Child_Process().
00747 {
00748 // Remove the names from the naming service
00749 ACE_DECLARE_NEW_CORBA_ENV;
00750 ACE_TRY
00751 {
00752 if (CORBA::is_nil (this->naming_context_.in ()) == 0)
00753 return 0;
00754 this->naming_context_->unbind (this->stream_endpoint_name_
00755 ACE_ENV_ARG_PARAMETER);
00756 ACE_TRY_CHECK;
00757
00758 this->naming_context_->unbind (this->vdev_name_
00759 ACE_ENV_ARG_PARAMETER);
00760 ACE_TRY_CHECK;
00761 }
00762 ACE_CATCHANY
00763 {
00764 ACE_PRINT_EXCEPTION (ACE_ANY_EXCEPTION,"TAO_Endpoint_Process_Strategy::activate");
00765 return -1;
00766 }
00767 ACE_ENDTRY;
00768 ACE_CHECK_RETURN (-1);
00769 return 0;
00770 }
|
|
|||||
|
Name of the host.
Definition at line 237 of file Endpoint_Strategy_T.h. |
|
|||||
|
Media controller.
Definition at line 228 of file Endpoint_Strategy_T.h. |
|
|||||
|
Definition at line 231 of file Endpoint_Strategy_T.h. |
|
|||||
|
The root Naming Context of the TAO naming service.
Definition at line 210 of file Endpoint_Strategy_T.h. |
|
|||||
|
Definition at line 239 of file Endpoint_Strategy_T.h. |
|
|||||
|
pid of this process
Definition at line 234 of file Endpoint_Strategy_T.h. |
|
|||||
|
Definition at line 241 of file Endpoint_Strategy_T.h. |
|
|||||
|
The stream endpoint member.
Definition at line 219 of file Endpoint_Strategy_T.h. |
|
|||||
|
Name of the stream_endpoint.
Definition at line 216 of file Endpoint_Strategy_T.h. |
|
|||||
|
The virtual device.
Definition at line 222 of file Endpoint_Strategy_T.h. |
|
|||||
|
Name of the vdev.
Definition at line 213 of file Endpoint_Strategy_T.h. |
|
|||||
|
Virtual device CORBA object reference.
Definition at line 225 of file Endpoint_Strategy_T.h. |
 1.3.6
1.3.6