#include <Thread_Control.h>
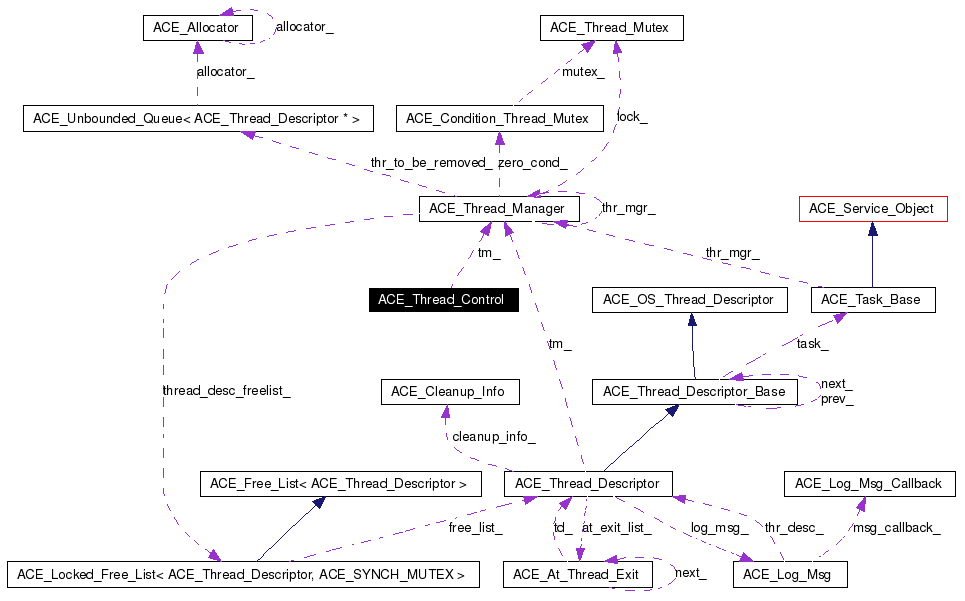
Collaboration diagram for ACE_Thread_Control:
Public Member Functions | |
| ACE_Thread_Control (ACE_Thread_Manager *tm=0, int insert=0) | |
| ~ACE_Thread_Control (void) | |
| ACE_THR_FUNC_RETURN | exit (ACE_THR_FUNC_RETURN status, int do_thr_exit) |
| int | insert (ACE_Thread_Manager *tm, int insert=0) |
| ACE_Thread_Manager * | thr_mgr (void) |
| Returns the current . | |
| ACE_Thread_Manager * | thr_mgr (ACE_Thread_Manager *) |
| ACE_THR_FUNC_RETURN | status (ACE_THR_FUNC_RETURN status) |
| Set the exit status (and return existing status). | |
| ACE_THR_FUNC_RETURN | status (void) |
| Get the current exit status. | |
| void | dump (void) const |
| Dump the state of an object. | |
Public Attributes | |
| ACE_ALLOC_HOOK_DECLARE | |
| Declare the dynamic allocation hooks. | |
Private Attributes | |
| ACE_Thread_Manager * | tm_ |
| Pointer to the thread manager for this block of code. | |
| ACE_THR_FUNC_RETURN | status_ |
| Keeps track of the exit status for the thread. | |
A ACE_Thread_Manager uses this class to ensure that threads it spawns automatically register and unregister themselves with it. This class can be stored in thread-specific storage using the ACE_TSS wrapper. When a thread exits the <ACE_TSS::cleanup> function deletes this object, thereby ensuring that it gets removed from its associated ACE_Thread_Manager.
Definition at line 43 of file Thread_Control.h.
|
||||||||||||
|
Initialize the thread control object. If != 0, then register the thread with the Thread_Manager. Definition at line 48 of file Thread_Control.cpp. References ACE_hthread_t, ACE_OS_TRACE, ACE_Thread_Manager::insert_thr(), ACE_OS::thr_self(), and tm_.
00050 : tm_ (t), 00051 status_ (0) 00052 { 00053 ACE_OS_TRACE ("ACE_Thread_Control::ACE_Thread_Control"); 00054 00055 if (this->tm_ != 0 && insert) 00056 { 00057 ACE_hthread_t t_id; 00058 ACE_OS::thr_self (t_id); 00059 this->tm_->insert_thr (ACE_OS::thr_self (), t_id); 00060 } 00061 } |
|
|
Remove the thread from its associated and exit the thread if is enabled. Definition at line 65 of file Thread_Control.cpp. References ACE_OS_TRACE, and exit().
00066 {
00067 ACE_OS_TRACE ("ACE_Thread_Control::~ACE_Thread_Control");
00068
00069 #if defined (ACE_HAS_RECURSIVE_THR_EXIT_SEMANTICS) || defined (ACE_HAS_TSS_EMULATION) || defined (ACE_WIN32)
00070 this->exit (this->status_, 0);
00071 #else
00072 this->exit (this->status_, 1);
00073 #endif /* ACE_HAS_RECURSIVE_THR_EXIT_SEMANTICS */
00074 }
|
|
|
Dump the state of an object.
Definition at line 24 of file Thread_Control.cpp. References ACE_OS_TRACE.
00025 {
00026 #if defined (ACE_HAS_DUMP)
00027 ACE_OS_TRACE ("ACE_Thread_Control::dump");
00028 #endif /* ACE_HAS_DUMP */
00029 }
|
|
||||||||||||
|
Remove this thread from its associated ACE_Thread_Manager and exit the thread if do_thr_exit is enabled. Definition at line 79 of file Thread_Control.cpp. References ACE_OS_TRACE, ACE_Thread_Manager::exit(), ACE_OS::thr_exit(), and tm_. Referenced by ~ACE_Thread_Control().
00080 {
00081 ACE_OS_TRACE ("ACE_Thread_Control::exit");
00082
00083 if (this->tm_ != 0)
00084 return this->tm_->exit (exit_status, do_thr_exit);
00085 else
00086 {
00087 #if !defined (ACE_HAS_TSS_EMULATION)
00088 // With ACE_HAS_TSS_EMULATION, we let ACE_Thread_Adapter::invoke ()
00089 // exit the thread after cleaning up TSS.
00090 ACE_OS::thr_exit (exit_status);
00091 #endif /* ! ACE_HAS_TSS_EMULATION */
00092 return 0;
00093 }
00094 }
|
|
||||||||||||
|
Store the and use it to register ourselves for correct shutdown. Definition at line 32 of file Thread_Control.cpp. References ACE_hthread_t, ACE_OS_TRACE, ACE_Thread_Manager::insert_thr(), ACE_OS::thr_self(), and tm_. Referenced by ACE_Thread_Exit::thr_mgr().
00033 {
00034 ACE_OS_TRACE ("ACE_Thread_Control::insert");
00035
00036 ACE_hthread_t t_id;
00037 ACE_OS::thr_self (t_id);
00038 this->tm_ = tm;
00039
00040 if (insert)
00041 return this->tm_->insert_thr (ACE_OS::thr_self (), t_id);
00042 else
00043 return 0;
00044 }
|
|
|
Get the current exit status.
Definition at line 19 of file Thread_Control.inl. References ACE_OS_TRACE.
00020 {
00021 ACE_OS_TRACE ("ACE_Thread_Control::status");
00022 return this->status_;
00023 }
|
|
|
Set the exit status (and return existing status).
Definition at line 10 of file Thread_Control.inl. References ACE_OS_TRACE.
00011 {
00012 ACE_OS_TRACE ("ACE_Thread_Control::status");
00013 return this->status_ = s;
00014 }
|
|
|
Atomically set a new and return the old . Definition at line 38 of file Thread_Control.inl. References ACE_OS_TRACE, and tm_.
00039 {
00040 ACE_OS_TRACE ("ACE_Thread_Control::thr_mgr");
00041 ACE_Thread_Manager *o_tm = this->tm_;
00042 this->tm_ = tm;
00043 return o_tm;
00044 }
|
|
|
Returns the current .
Definition at line 28 of file Thread_Control.inl. References ACE_OS_TRACE, and tm_.
00029 {
00030 ACE_OS_TRACE ("ACE_Thread_Control::thr_mgr");
00031 return this->tm_;
00032 }
|
|
|
Declare the dynamic allocation hooks.
Definition at line 81 of file Thread_Control.h. |
|
|
Keeps track of the exit status for the thread.
Definition at line 88 of file Thread_Control.h. |
|
|
Pointer to the thread manager for this block of code.
Definition at line 85 of file Thread_Control.h. Referenced by ACE_Thread_Control(), exit(), insert(), and thr_mgr(). |
 1.3.6
1.3.6