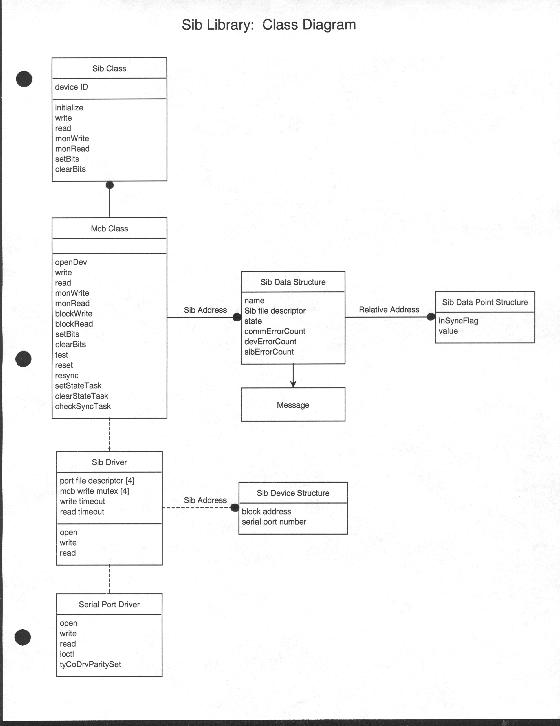
* Mcb Class
+ Data store for each open SIB
- Error counters
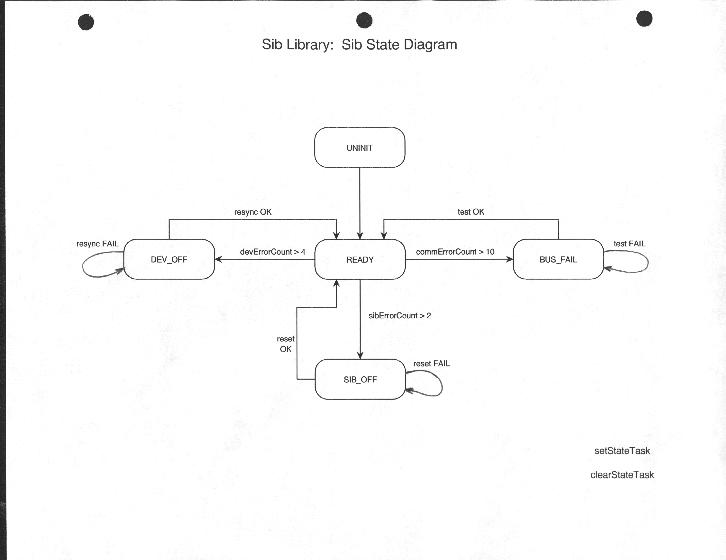
- State information:
IDLE, SIB_OFF, DEV_OFF, BUS_FAIL, READY
- List of all SIB relative addresses that have been successfully read/written
and
the data value.
+ Read and write methods return an error code without attempting to talk
to the hardware
if an SIB's state is not READY
+ State management tasks
- setStateTask
Regularly examines the error counters of each Sib and changes the state
if any of the error counter values exceed preset levels
- clearStateTask
Regularly examines the state of each Sib and changes the state back to
READY
if the SIB responds to a read. In the case of SIB_OFF->READY it re-initializes
the SIB and re-writes all the control values.
+ Hardware/Software synchronisation task
- resyncTask
Low priority task that regularly reads control RAs and compares with the
values
stored in software. It flags and tries to re-write any that are found
to be Not In Sync.
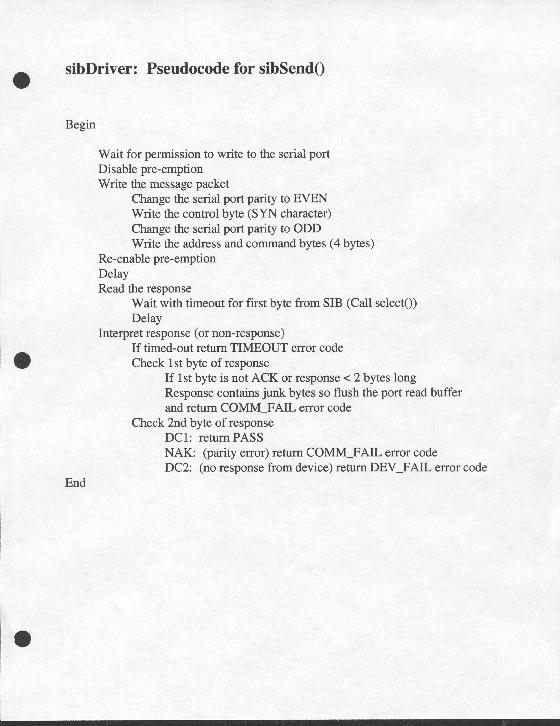
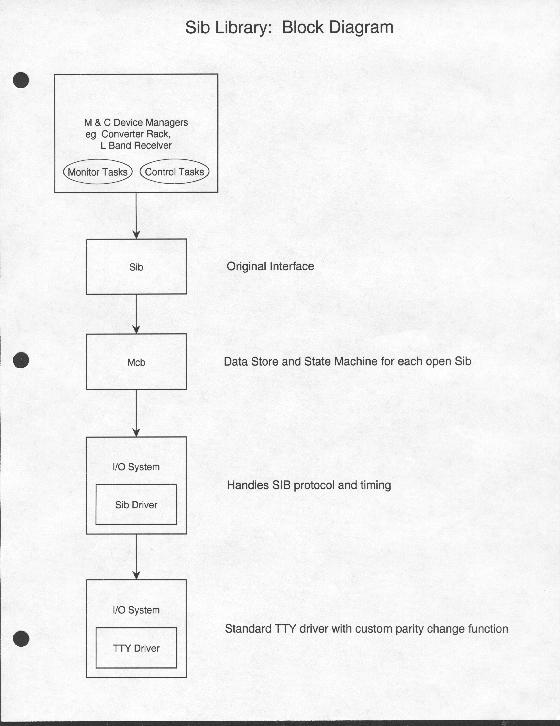
* Sib Driver
+ Written as a VxWorks I/O system driver
+ Open, Read, Write implemented.
- open
Configures serial port(s), searches for, and initializes an SIB.
+ Calls standard tty driver with timeout
- Uses select() for port read timeout
Select provides wait with timeout on multiple file descriptors.
+ Handles protocol and timing
+ Interprets response from SIB and returns an error code as appropriate.
Searching .........................................
.........................................
Found Sib device at address 0x50
.
Found Sib device at address 0x52
.....
Found Sib device at address 0x58
...........
Found Sib device at address 0x64
...........................
-> DUT = 0x64
-> mcbRead 0x50
Sib device 0x64: Value at RA 50 = 0xffc0
-> mcbReadn 0xa, 5
Sib device 0x64:
1) Value at RA a = 0x727f
2) Value at RA a = 0x727f
3) Value at RA a = 0x727f
4) Value at RA a = 0x727f
5) Value at RA a = 0x727f
-> mcbPrintErrors
Sib device 0x64:
Control data parity error
counter, messages in block = 0
Invalid SYN character count
= 0
Control data parity error
counter, all messages = 0
Address parity error counter,
all messages = 0
No monitor response counter
= 0
No control response counter
= 0
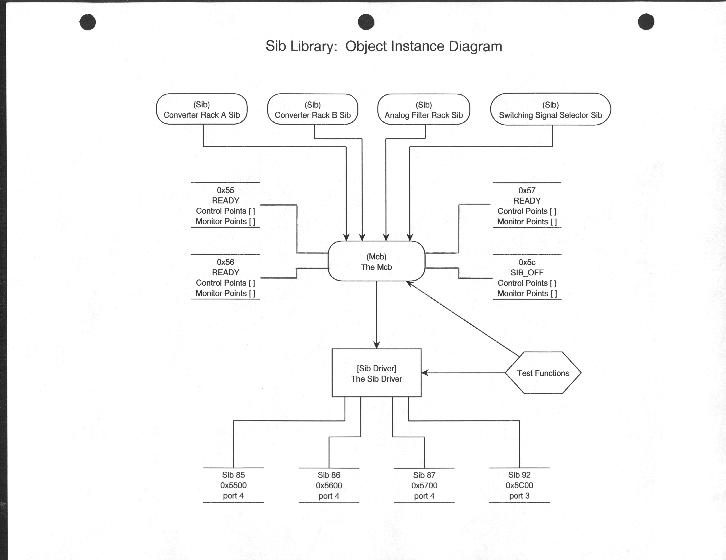
-> printMcbInfo
There are 5 open SIB devices.
Name: sib5
Address: 0x5
State: SIB_OFF
commErrorCount = 0
devErrorCount = 0
sibErrorCount = 12
controlPoints:
RA 40 = 0x866 NIS
RA 41 = 0x800 NIS RA 48 = 0x7 NIS RA
49 = 0xffcc NIS
RA 4b = 0x0 NIS
RA 4c = 0x6 NIS RA 4d = 0xfff7 NIS
RA 4e = 0xfff7 NIS
monitorPoints:
RA 0 = 0x5eaf
RA 4 = 0xeadf RA 5 = 0xcc0f
RA 6 = 0xd02f
RA 7 = 0x70ff
RA 8 = 0x7eff RA 9 = 0x607f
RA a = 0xa65f
RA b = 0x3e6f
RA c = 0x58ef RA d = 0x586f
RA e = 0x5a5f
RA 16 = 0x5c3f
RA 17 = 0x58ef RA 25 = 0x800f
RA 26 = 0x82af
RA 27 = 0x800f
RA 28 = 0xc1f RA 29 = 0x800f
RA 2a = 0xfc1f
RA 2e = 0x49f
RA 40 = 0xf866 RA 41 = 0xf800
RA 48 = 0xfcf7
RA 49 = 0xfccc
RA 4b = 0xfc00 RA 4c = 0xfcf6
RA 4d = 0xfcf7
RA 4e = 0xfcf7
RA 50 = 0xfc5f RA 52 = 0xfcff
RA 53 = 0xfcfc
Name: sib80 Address:
0x50
State: READY
commErrorCount = 0
devErrorCount = 0
sibErrorCount = 0
controlPoints:
RA 0 = 0xfffe
RA 1 = 0xfffe RA 2 = 0xfffd
RA 3 = 0xfffe
RA 4 = 0xffef
RA 5 = 0xffff RA 6 = 0xffff
RA 7 = 0xffff
RA 8 = 0xfffe
RA 9 = 0xfffe RA a = 0x1
RA 10 = 0xfffe
RA 11 = 0xfff7
RA 12 = 0xfff7 RA 13 = 0xffff
RA 14 = 0xffff
monitorPoints:
RA 0 = 0xfffe
RA 1 = 0xfffe RA 2 = 0xfffd
RA 3 = 0xfffe
RA 4 = 0xffef
RA 5 = 0xffff RA 6 = 0xffff
RA 7 = 0xffff
RA 8 = 0xfffe
RA 9 = 0xfffe RA a = 0xff01
RA 10 = 0xfffe
RA 11 = 0xfff7
RA 12 = 0xfff7 RA 13 = 0xffff
RA 14 = 0xffff
RA 18 = 0xfffe
RA 19 = 0xfffe RA 28 = 0xfffe
Name: sib82 Address:
0x52
State: READY
commErrorCount = 0
devErrorCount = 0
sibErrorCount = 0
controlPoints:
RA 20 = 0x7
RA 21 = 0x7 RA 22
= 0x7 RA 23 = 0x7
RA 24 = 0x7
RA 25 = 0x7 RA 26
= 0x7 RA 27 = 0x7
RA 28 = 0x0
RA 29 = 0x49 RA 2a = 0x49
RA 2b = 0x0
RA 2c = 0x0
RA 2d = 0x5b RA 2e = 0x5b
RA 2f = 0x0
RA 30 = 0x0
monitorPoints:
RA 0 = 0xff5f
RA 1 = 0x6ef RA 2 = 0x48f
RA 3 = 0xef
RA 8 = 0xfdff
RA 9 = 0xffff RA a = 0xffff
RA b = 0xffff
RA 10 = 0xf42f
RA 11 = 0xf2ff RA 12 = 0xf8af
RA 13 = 0xf9af
RA 14 = 0xfeff
RA 15 = 0xfe3f RA 16 = 0xffdf
RA 17 = 0x21f
RA 1b = 0x416f
RA 1c = 0xbebf RA 1d = 0x60af
RA 1e = 0x9f1f
RA 20 = 0xff07
RA 21 = 0xff07 RA 22 = 0xff07
RA 23 = 0xff07
RA 24 = 0xff07
RA 25 = 0xff07 RA 26 = 0xff07
RA 27 = 0xff07
RA 28 = 0xff00
RA 29 = 0xff49 RA 2a = 0xff49
RA 2b = 0xff00
RA 2c = 0xff00
RA 2d = 0xff5b RA 2e = 0xff5b
RA 2f = 0xff00
RA 30 = 0xff00
RA 31 = 0xffff RA 32 = 0xffff
Name: sib88 Address:
0x58
State: READY
commErrorCount = 0
devErrorCount = 0
sibErrorCount = 0
controlPoints:
RA 48 = 0x3 NIS
monitorPoints:
RA 48 = 0xfff3
Name: sib100 Address:
0x64
State: READY
commErrorCount = 0
devErrorCount = 0
sibErrorCount = 0
controlPoints:
RA 49 = 0x1
monitorPoints:
RA 0 = 0x1fef
RA 1 = 0x36df RA 2 = 0x727f
RA 3 = 0xffef
RA 4 = 0x727f
RA 5 = 0xffff RA
6 = 0x727f RA 7 = 0xffef
RA 8 = 0x727f
RA 9 = 0xffef RA a = 0x727f
RA b = 0xffff
RA c = 0xd3bf
RA d = 0xdf2f RA e = 0xd6bf
RA f = 0xdeaf
RA 10 = 0x685f
RA 11 = 0x69df RA 12 = 0x69ef
RA 13 = 0x69df
RA 49 = 0xff01
RA 50 = 0xffc0 RA 51 = 0xdf64
RA 52 = 0xffdf
RA 53 = 0xffdf
RA 54 = 0xffdf RA 55 = 0xfff7
Rx ACK